一种无人驾驶自动插秧机的制作方法
1.本发明涉及自动插秧技术领域,具体是指一种无人驾驶自动插秧机。
背景技术:
2.农业生产本来就是微利行业,每一项成本都会影响到农业生产的效益,减少的成本会直接增加农业生产的利润。考虑到插秧机在工作中需要人工驾驶和人工续秧盘的实际情况,为减少人工成本,提高插秧机作业效率,需要研究开发出一款无人驾驶可直角转向电驱自动水稻插秧机,从需减少人工续秧工作程序,进而降低种植成本,提高农业生产效益。
技术实现要素:
3.本发明要解决的技术问题是克服上述技术的缺陷,提供一种无人驾驶自动插秧机。
4.为解决上述技术问题,本发明提供的技术方案为一种无人驾驶自动插秧机:包括插秧机本体,所述插秧机本体包括行驶部以及与行驶部连接的插秧部,所述插秧部一端设有自动续秧部;
5.所述行驶部包括圆形转动底盘,所述圆形转动底盘上部设有自动化行驶控制部以及电池,所述圆形转动底盘下部设有若干行驶轮,所述行驶轮的轴侧设有电驱转向部,所述圆形转动底盘上部还设有支架,所述支架设有存秧部,所述存秧部与自动续秧部连接。
6.作为改进,所述行驶轮数量为四个。
7.作为改进,所述插秧部的靠近行驶部的下部设有挡泥刮平板。
8.作为改进,所述圆形转动底盘为360度转动盘。
9.本发明与现有技术相比的优点在于:当需要使用时,通过行驶轮完成道路和田间行走,电驱转向部提供可直角转向,并通过电机驱动行驶轮完成进退行走,行驶部的电池固定安装在圆形转动底盘上,不仅可以增加必要的配重,同时可以节约机械的空间,圆形转动底盘可提供类似于挖掘机一样方便灵活的转动,可以更小的转弯半径适应不越过水田池埂作业、多角度作业。支架提供固定功能,将存秧部及自动续秧部有机结合,固定支撑,在插秧前通过挡泥刮平板实现水稻秧苗在插入泥土中更平整,同时有效防止插秧过程中传统秧机的摇摆。存秧部实现比现有插秧机预存更多的秧盘,为减少停机续秧争取更多的作业时间,自动续秧部能够完成秧苗由存秧部自动传输到插秧部,省去了人工续秧环节,最后通过插秧部完成水稻插秧作业。
10.本无人驾驶自动插秧机,可实现无人驾驶、自动化续秧、直角转向、电驱、不过秧池埂作业,减少驾驶员和续秧人员,能够大幅度降低人工成本,提高作业效率,智能、高效,具有很高的实用价值和推广价值。
附图说明
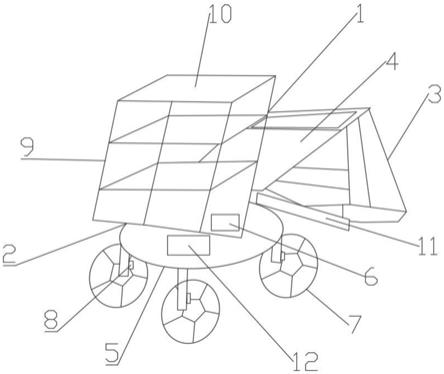
11.图1是本发明一种无人驾驶自动插秧机的结构示意图。
12.如图所示:1、插秧机本体,2、行驶部,3、插秧部,4、自动续秧部,5、圆形转动底盘,6、电池,7、行驶轮,8、电驱转向部,9、支架,10、存秧部,11、挡泥刮平板,12、自动化行驶控制部。
具体实施方式
13.下面结合附图对本发明一种无人驾驶自动插秧机做进一步的详细说明。
14.结合附图1,一种无人驾驶自动插秧机,包括插秧机本体1,所述插秧机本体1包括行驶部2以及与行驶部2连接的插秧部3,所述插秧部3一端设有自动续秧部4;
15.所述行驶部2包括圆形转动底盘5,所述圆形转动底盘5上部设有自动化行驶控制部12以及电池6,所述圆形转动底盘5下部设有若干行驶轮7,所述行驶轮7的轴侧设有电驱转向部8,所述圆形转动底盘5上部还设有支架9,所述支架9设有存秧部10,所述存秧部10与自动续秧部4连接。
16.所述行驶轮7数量为四个。
17.所述插秧部3的靠近行驶部2的下部设有挡泥刮平板11。
18.所述圆形转动底盘5为360度转动盘。
19.本发明在具体实施时,当需要使用时,通过行驶轮7完成道路和田间行走,电驱转向部8提供可直角转向,并通过电机驱动行驶轮7完成进退行走,行驶部2的电池6固定安装在圆形转动底盘5上,不仅可以增加必要的配重,同时可以节约机械的空间,圆形转动底盘5可提供类似于挖掘机一样方便灵活的转动,可以更小的转弯半径适应不越过水田池埂作业、多角度作业。支架9提供固定功能,将存秧部10及自动续秧部4有机结合,固定支撑,在插秧前通过挡泥刮平板11实现水稻秧苗在插入泥土中更平整,同时有效防止插秧过程中传统秧机的摇摆。存秧部10实现比现有插秧机预存更多的秧盘,为减少停机续秧争取更多的作业时间,自动续秧部10能够完成秧苗由存秧部10自动传输到插秧部3,省去了人工续秧环节,最后通过插秧部3完成水稻插秧作业。
20.本无人驾驶自动插秧机,可实现无人驾驶、自动化续秧、直角转向、电驱、不过秧池埂作业,减少驾驶员和续秧人员,能够大幅度降低人工成本,提高作业效率,智能、高效,具有很高的实用价值和推广价值。
21.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
技术特征:
1.一种无人驾驶自动插秧机,其特征在于:包括插秧机本体(1),所述插秧机本体(1)包括行驶部(2)以及与行驶部(2)连接的插秧部(3),所述插秧部(3)一端设有自动续秧部(4);所述行驶部(2)包括圆形转动底盘(5),所述圆形转动底盘(5)上部设有自动化行驶控制部(12)以及电池(6),所述圆形转动底盘(5)下部设有若干行驶轮(7),所述行驶轮(7)的轴侧设有电驱转向部(8),所述圆形转动底盘(5)上部还设有支架(9),所述支架(9)设有存秧部(10),所述存秧部(10)与自动续秧部(4)连接。2.根据权利要求1所述的一种无人驾驶自动插秧机,其特征在于:所述行驶轮(7)数量为四个。3.根据权利要求1所述的一种无人驾驶自动插秧机,其特征在于:所述插秧部(3)的靠近行驶部(2)的下部设有挡泥刮平板(11)。4.根据权利要求1所述的一种无人驾驶自动插秧机,其特征在于:所述圆形转动底盘(5)为360度转动盘。
技术总结
本发明公开了一种无人驾驶自动插秧机:包括插秧机本体,插秧机本体包括行驶控制部以及与行驶控制部连接的插秧部,插秧部一端设有自动续秧部;行驶控制部包括圆形转动底盘,圆形转动底盘上部设有自动化行驶控制部以及电池,圆形转动底盘下部设有若干行驶轮,行驶轮的轴侧设有电驱转向部,圆形转动底盘上部还设有支架,支架设有存秧部,存秧部与自动续秧部连接。行驶轮数量为四个。插秧部的靠近行驶控制部的下部设有挡泥刮平板。圆形转动底盘为360度转动盘。当需要使用时,通过行驶轮完成道路和田间行走,电驱转向部提供可直角转向,并通过电机驱动行驶轮完成进退行走,行驶控制部的电池固定安装在圆形转动底盘上,可以节约机械的空间。间。间。
技术研发人员:魏雨缪 李媛
受保护的技术使用者:黑龙江荒润科技有限公司
技术研发日:2021.11.08
技术公布日:2022/1/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1