一种鱼缸清洁机器人
1.本实用新型涉及鱼缸清洁领域,具体涉及一种鱼缸清洁机器人。
背景技术:
2.在室内放置鱼缸能够在满足饲养乐趣的同时美化室内环境,但也会带来给鱼缸清洁的问题。
3.鱼缸的内壁和底部会附着物,会危害鱼的健康,也会影响对鱼的观赏性,用户需要定期清洁鱼缸以保持鱼缸的清洁环境,现有鱼缸的清洁方式通常是采用最原始的人工清洁方式,也即,将鱼腾出鱼缸后,人工对鱼缸进行清洁后换水,再将鱼重新放入鱼缸;这种人工清洁方式耗费人力且浪费时间,降低饲养鱼的体验。
技术实现要素:
4.本实用新型所要解决的技术问题是:现有鱼缸采用人工清洁模式,清洁效率低,本实用新型提供了解决上述问题的一种鱼缸清洁机器人。
5.本实用新型通过下述技术方案实现:
6.一种鱼缸清洁机器人,所述鱼缸清洁机器人设置有机座,所述机座内部设有电源盒,所述电源盒上、下、左、右、前、后六个方向均设有推进器安装腔,所述推进器安装腔内均安装有推进器;位于所述电源盒上、下、左、右、前五个方向的推进器上均安装有螺旋桨,位于所述电源盒后方的推进器上安装有清洁模块。
7.所述机座起到安装设备与承力的作用,所述电源盒为推进器供电,所述推进器通过控制所述五个方向螺旋桨进行旋转,实现所述机器人向各个方向的移动,通过所述清洁模块相对应的推进器提供压力,使所述清洁模块逼近待清洁鱼缸的内表面,当所述清洁模块承受的压力达到设定阈值时,所述推进器停止逼近清洁模块,并控制所述清洁模块开始清洁。
8.具体的,所述电源盒分为上层和下层;所述电源盒的顶部设有铰链结构,所述电源盒底部设有半圆柱卡扣,通过所述铰链结构与所述半圆柱卡扣,实现电源盒的开闭功能。
9.可选的,所述电源盒上层设置有控制板、陀螺仪和激光测距传感器,所述陀螺仪用于调整所述清洁模块的方向,所述激光测距传感器用于实时探测所述鱼缸清洁机器人周围的地理位置环境,引导所述鱼缸清洁机器人移动到目标位置;所述陀螺仪和激光测距传感器均与所述控制板通信连接。
10.可选的,所述电源盒下层设置有电源模块。
11.优选的,每个所述推进器安装腔的腔底均设有用于限定所述推进器安装空间的四个半圆球。
12.具体的,所述机座分为上座和下座,所述上座与下座通过卡接结构连接在一起,连接处设有两个皮带卡扣。
13.所述卡接结构的卡块与卡槽之间设有密封槽,所述密封槽内安装有橡胶密封圈。
14.具体的,所述机座上设有用于接通电源的摇臂开关和用于检测水压的液位开关。拨动机座上的摇臂开关接通电源,当所述液位开关检测到的水压达到指定参数后,机器人开始工作。
15.具体的,所述机座上设有手柄,为用户拿出机器人提供了方便。
16.具体的,所述机座为椭圆机座,所述椭圆机座采用对称的机械结构,平衡重心。
17.本实用新型具有如下的优点和有益效果:
18.本实用新型一种鱼缸清洁机器人,通过机器人自动完成鱼缸清洁,提高了清洁效率,使得鱼的饲养体验更佳。
附图说明
19.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本申请的一部分,并不构成对本实用新型实施例的限定。在附图中:
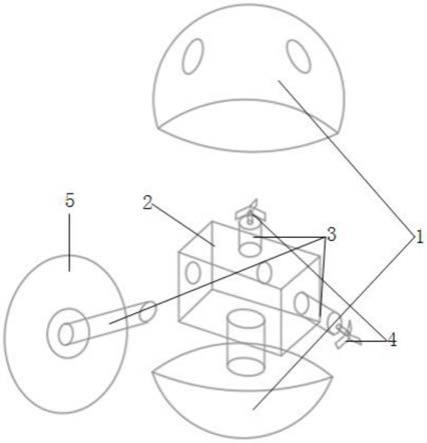
20.图1为本实用新型一种鱼缸清洁机器人的爆炸结构图。
21.附图中标记及对应的零部件名称:
[0022]1‑
机座,2
‑
电源盒,3
‑
推进器,4
‑
螺旋桨,5
‑
清洁模块。
具体实施方式
[0023]
为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
[0024]
实施例
[0025]
在室内放置鱼缸能够在满足饲养乐趣的同时美化室内环境,但也会带来给鱼缸清洁的问题。
[0026]
鱼缸的内壁和底部会附着物,会危害鱼的健康,也会影响对鱼的观赏性,用户需要定期清洁鱼缸以保持鱼缸的清洁环境,现有鱼缸的清洁方式通常是采用最原始的人工清洁方式,也即,将鱼腾出鱼缸后,人工对鱼缸进行清洁后换水,再将鱼重新放入鱼缸;这种人工清洁方式耗费人力且浪费时间,降低饲养鱼的体验。
[0027]
本实施例提出一种鱼缸清洁机器人,具体结构如图1所示,鱼缸清洁机器人设置有机座1,机座1内部设有电源盒2,电源盒2上、下、左、右、前、后六个方向均设有推进器安装腔,推进器安装腔内均安装有推进器3;位于电源盒2上、下、左、右、前五个方向的推进器上均安装有螺旋桨4,位于电源盒2后方的推进器3上安装有清洁模块5。
[0028]
机座1起到安装设备与承力的作用,电源盒2为推进器3供电,推进器3通过控制五个方向螺旋桨4进行旋转,实现机器人向各个方向的移动,通过清洁模块5相对应的推进器3提供压力,使清洁模块5逼近待清洁鱼缸的内表面,当清洁模块所承受的压力达到设定的压力参数后,清洁模块5相对应的推进器3停止逼近清洁模块,并控制清洁模块开始清洁。
[0029]
电源盒分为上层和下层;电源盒的顶部设有铰链结构,电源盒底部设有半圆柱卡扣,通过铰链结构与半圆柱卡扣,实现电源盒的开闭功能。电源盒上层设置有控制板、陀螺仪和激光测距模块,陀螺仪用于调整清洁模块的方向,激光测距传感器用于实时探测鱼缸清洁机器人周围的地理位置环境,引导鱼缸清洁机器人移动到目标位置;陀螺仪和激光测
距传感器均与控制板通信连接。电源盒下层设置有电源模块。
[0030]
每个安装腔的腔底均有四个半圆球,用于限定推进器的安装空间。机座分为上座和下座,上座与下座通过卡接结构连接在一起,连接处设有两个皮带卡扣;卡接结构的卡块与卡槽之间设有密封槽,密封槽内安装有橡胶密封圈,以避免机座进水,导致损坏。机座上设有摇臂开关和液位开关,拨动机座上的摇臂开关接通电源,当液位开关检测到的水压达到指定参数后,机器人开始工作。机座上设有手柄,为用户拿出机器人提供了方便。机座为椭圆机座,椭圆机座采用对称的机械结构,平衡重心。
[0031]
以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种鱼缸清洁机器人,其特征在于,所述鱼缸清洁机器人设置有机座(1),所述机座(1)内部设有电源盒(2),所述电源盒上、下、左、右、前、后六个方向均设有推进器安装腔,所述推进器安装腔内均安装有推进器(3);位于所述电源盒(2)上、下、左、右、前五个方向的推进器(3)上均安装有螺旋桨(4),位于所述电源盒(2)后方的推进器(3)上安装有清洁模块(5)。2.根据权利要求1所述的一种鱼缸清洁机器人,其特征在于,所述电源盒(2)分为上层和下层;所述电源盒(2)的顶部设有铰链结构,所述电源盒(2)底部设有半圆柱卡扣,通过所述铰链结构与所述半圆柱卡扣,实现电源盒的开闭功能。3.根据权利要求2所述的一种鱼缸清洁机器人,其特征在于,所述电源盒(2)上层设置有控制板、陀螺仪和激光测距传感器,所述陀螺仪用于调整所述清洁模块的方向,所述激光测距传感器用于实时探测所述鱼缸清洁机器人周围的地理位置环境,引导所述鱼缸清洁机器人移动到目标位置;所述陀螺仪和激光测距传感器均与所述控制板通信连接。4.根据权利要求2所述的一种鱼缸清洁机器人,其特征在于,所述电源盒(2)下层设置有电源模块。5.根据权利要求1所述的一种鱼缸清洁机器人,其特征在于,每个所述推进器安装腔的腔底均设有用于限定所述推进器(3)安装空间的四个半圆球。6.根据权利要求1所述的一种鱼缸清洁机器人,其特征在于,所述机座(1)分为上座和下座,所述上座与下座通过卡接结构连接在一起,连接处设有两个皮带卡扣。7.根据权利要求6所述的一种鱼缸清洁机器人,其特征在于,所述卡接结构的卡块与卡槽之间设有密封槽,所述密封槽内安装有橡胶密封圈。8.根据权利要求1所述的一种鱼缸清洁机器人,其特征在于,所述机座(1)上设有用于接通电源的摇臂开关和用于检测水压的液位开关。9.根据权利要求1所述的一种鱼缸清洁机器人,其特征在于,所述机座(1)上设有手柄。10.根据权利要求1所述的一种鱼缸清洁机器人,其特征在于,所述机座(1)为椭圆机座,所述椭圆机座采用对称的机械结构。
技术总结
本实用新型公开了一种鱼缸清洁机器人,鱼缸清洁机器人设置有机座,机座内部设有电源盒,电源盒上、下、左、右、前、后六个方向均设有推进器安装腔,推进器安装腔内均安装有推进器;位于电源盒上、下、左、右、前五个方向的推进器上均安装有螺旋桨,位于电源盒后方的推进器上安装有清洁模块。本实用新型通过机器人自动完成鱼缸清洁,提高了清洁效率,使得鱼的饲养体验更佳。体验更佳。体验更佳。
技术研发人员:武燕 梁同 罗强 周杰 杜博枝 金启刚 杜娟 严立甫 王媛 周晓庆 郭兴吉
受保护的技术使用者:西南科技大学城市学院
技术研发日:2021.02.02
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1