一种转运鱼获用的转运系统的制作方法
1.本实用新型属于海工装备领域;具体涉及一种转运鱼获用的转运系统。
背景技术:
2.渔获转运主要应用于深海养殖场,目前最常使用的渔获转运系统主要是使用吊机将渔获物用网兜吊运,对渔获物的损伤较大。
技术实现要素:
3.本实用新型其目的就在于提供一种转运鱼获用的转运系统,以解决上述背景技术中的问题。
4.为实现上述目的而采取的技术方案是,一种转运鱼获用的转运系统,包括控制柜和真空吸鱼泵,所述真空吸鱼泵通过抽真空管道分别与多个真空筒连接,多个所述真空筒的一端均通过吸鱼管道与养殖场连接,多个所述真空筒的另一端均通过排鱼管道与货舱连接;所述真空吸鱼泵与真空筒之间连接的抽真空管道上设有抽真空阀;所述养殖场与真空筒之间连接的吸鱼管道上设有吸鱼阀;所述货舱与真空筒之间连接的排鱼管道上设有排鱼阀;所述真空筒内设有压力及液位传感器;所述控制柜分别与真空吸鱼泵、抽真空阀、吸鱼阀、排鱼阀、压力及液位传感器之间电性连接。
5.进一步,所述真空筒有2个,2个所述真空筒进行双筒交替吸鱼排鱼工作,使得吸鱼排鱼过程保持连续。
6.进一步,所述吸鱼管道长度不大于3m;所述排鱼管上设置有漏水孔,在排鱼过程中可将渔获物与水分离。
7.进一步,所述抽真空管道、吸鱼管道、排鱼管道内均设有与控制柜电性连接的流量及液位传感器。
8.有益效果
9.与现有技术相比本实用新型具有以下优点。
10.本实用新型可起捕深海养殖场的渔获物,实现机械化工作,极大降低工人的劳动强度。
附图说明
11.以下结合附图对本实用新型作进一步详述。
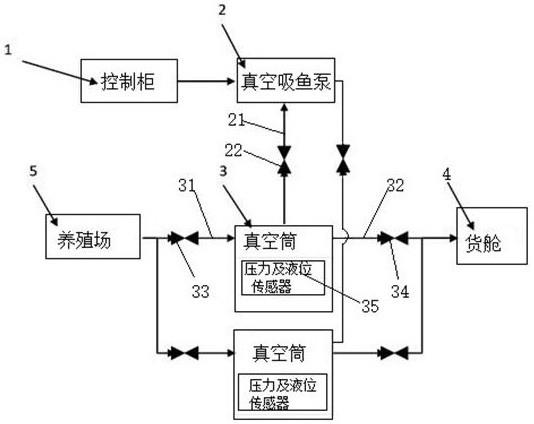
12.图1为本实用新型的结构示意图;
13.图2为本实用新型的实施结构示意图。
具体实施方式
14.下面结合实施例及附图对本实用新型作进一步描述。
15.如图1所示,一种转运鱼获用的转运系统,包括控制柜1和真空吸鱼泵2,所述真空
吸鱼泵2通过抽真空管道21分别与多个真空筒3连接,多个所述真空筒3的一端均通过吸鱼管道31与养殖场5连接,多个所述真空筒3的另一端均通过排鱼管道32与货舱4连接;所述抽真空管道21上设有抽真空阀22;所述吸鱼管道31上设有吸鱼阀33;所述排鱼管道32上设有排鱼阀34;所述真空筒3内设有压力及液位传感器35;所述控制柜1分别与真空吸鱼泵2、抽真空阀22、吸鱼阀33、排鱼阀34、压力及液位传感器35之间电性连接。
16.所述真空筒3有2个,2个所述真空筒3进行双筒交替吸鱼排鱼工作,使得吸鱼排鱼过程保持连续。
17.所述吸鱼管道31长度不大于3m;所述排鱼管道32上设置有漏水孔,在排鱼过程中可将渔获物与水分离。
18.所述抽真空管道21、吸鱼管道31、排鱼管道32内均设有与控制柜1电性连接的流量及液位传感器。
19.本实用新型的工作原理是:关闭排鱼阀34和吸鱼阀33,打开抽真空阀22,在真空筒3被真空吸鱼泵2抽成真空后,关闭抽真空阀22,打开吸鱼阀33,鱼水混合体在大气压作用下从吸鱼管道31进入真空筒3内,直到内外压力平衡后,关闭吸鱼阀33,打开排鱼阀34,排尽后关闭排鱼阀34和吸鱼阀33;重复以上步骤实现鱼类的输送,在系统运行过程中,在传输管路、真空筒等部件中设置流量、液位等传感器,实现对系统的实时监控,并显示相关的运行信息,确保系统稳定运行。
实施例
20.本实用新型在具体实施时,如图2所示,所述真空筒3为2个,即3、4号真空筒;所述吸鱼阀33、排鱼阀34、抽真空阀22均为2组,即7、8号抽真空阀,9、11号吸鱼阀,10、12号排鱼阀;所述控制柜1控制真空吸鱼泵2的动作,并监测2个真空筒3内的压力及液位,根据2个真空筒3内的压力及液位控制系统中各个阀门的动作,使得养殖场的渔获物由真空筒起捕到运输船的货舱。
21.系统开始工作时,9、11号吸鱼阀和10、12号排鱼阀关闭,8号抽真空阀关闭,7号抽真空阀打开,真空吸鱼泵2启动,当监测到3号真空筒内的压力降低到0.01mpa时,7号抽真空阀关闭,8号抽真空阀打开,开始将4号真空筒内的压力抽吸至0.01mpa,同时9号吸鱼阀打开,此时,在大气压力作用下,渔获物从养殖场5被抽吸到3号真空筒内,当3号真空筒内的压力与外界平衡后,关闭9号吸鱼阀,打开10号排鱼阀,渔获物通过重力排放到货舱4,此时4号真空筒内的压力被抽吸到0.01mpa,将8号抽真空阀关闭,7号抽真空阀打开,11号吸鱼阀打开,此时,在大气压力的作用下,渔获物从养殖场5被抽吸到4号真空筒内,当4号真空筒内的压力与外界平衡后,关闭11号吸鱼阀,打开12号排鱼阀,渔获物通过重力排放到货舱4,这样循环操作就实现了3号真空筒和4号真空筒交替吸鱼排鱼,使得系统的转运效率大大提升,满足养殖场的渔获起捕要求。
技术特征:
1.一种转运鱼获用的转运系统,包括控制柜(1)和真空吸鱼泵(2),其特征在于,所述真空吸鱼泵(2)通过抽真空管道(21)分别与多个真空筒(3)连接,多个所述真空筒(3)的一端均通过吸鱼管道(31)与养殖场(5)连接,多个所述真空筒(3)的另一端均通过排鱼管道(32)与货舱(4)连接;所述抽真空管道(21)上设有抽真空阀(22);所述吸鱼管道(31)上设有吸鱼阀(33);所述排鱼管道(32)上设有排鱼阀(34);所述真空筒(3)内设有压力及液位传感器(35);所述控制柜(1)分别与真空吸鱼泵(2)、抽真空阀(22)、吸鱼阀(33)、排鱼阀(34)、压力及液位传感器(35)之间电性连接。2.根据权利要求1所述的一种转运鱼获用的转运系统,其特征在于,所述真空筒(3)有2个,2个所述真空筒(3)进行双筒交替吸鱼排鱼工作,使得吸鱼排鱼过程保持连续。3.根据权利要求1所述的一种转运鱼获用的转运系统,其特征在于,所述吸鱼管道(31)长度不大于3m;所述排鱼管道(32)上设置有漏水孔,在排鱼过程中可将渔获物与水分离。4.根据权利要求1所述的一种转运鱼获用的转运系统,其特征在于,所述抽真空管道(21)、吸鱼管道(31)、排鱼管道(32)内均设有与控制柜(1)电性连接的流量及液位传感器。
技术总结
本实用新型公开了一种转运鱼获用的转运系统,包括控制柜和真空吸鱼泵,所述真空吸鱼泵通过抽真空管道分别与多个真空筒连接,多个所述真空筒的一端均通过吸鱼管道与养殖场连接,多个所述真空筒的另一端均通过排鱼管道与货舱连接;所述真空吸鱼泵与真空筒之间连接的抽真空管道上设有抽真空阀;所述养殖场与真空筒之间连接的吸鱼管道上设有吸鱼阀;所述货舱与真空筒之间连接的排鱼管道上设有排鱼阀;所述真空筒内设有压力及液位传感器;所述控制柜分别与真空吸鱼泵、抽真空阀、吸鱼阀、排鱼阀、压力及液位传感器之间电性连接。本实用新型通过控制柜实时监控多个真空筒内的压力及液位,以控制真空吸鱼泵、各阀门等部件的工作,使得吸鱼动作保持连续性。吸鱼动作保持连续性。吸鱼动作保持连续性。
技术研发人员:刘刚 柴广楠 周仕华 周立
受保护的技术使用者:九江精密测试技术研究所
技术研发日:2021.11.26
技术公布日:2022/4/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1