一种基于机器视觉的自动避障的采摘机器人及控制方法
1.本发明涉及机器人技术领域,具体为一种基于机器视觉的自动避障的采摘机器人及控制方法。
背景技术:
2.机器人是自动执行工作的机器装置,在日新月异的时代中,机器人扮演着至关重要的协助者的位置,它可用于协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作,是现代化技术的先进体现之一。
3.现有的采摘机器人,采摘一个水果就需要将水果放进箱内,导致采摘速度慢,耗费大量的人力,采摘成本高。
技术实现要素:
4.鉴于现有一种基于机器视觉的自动避障的采摘机器人及控制方法中存在的问题,提出了本发明。
5.因此,本发明的目的是提供一种基于机器视觉的自动避障的采摘机器人及控制方法,通过驱动装置来带动采摘机构进行移动,并利用缓冲装置将采摘的水果进行盛放,加快了采摘速度,解决了现有的采摘机器人,采摘一个水果就需要将水果放进箱内,导致采摘速度慢,耗费大量的人力,采摘成本高的问题。
6.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
7.一种基于机器视觉的自动避障的采摘机器人,包括支撑组件和控制系统,所述支撑组件上安装有驱动装置,所述驱动装置上安装有采摘机构和缓冲装置;
8.所述驱动装置包括第一伺服电机,所述第一伺服电机的输出轴固定连接螺纹杆,所述螺纹杆外壁螺纹连接动力螺母,所述动力螺母嵌入升降板中,所述升降板上安装有导套,所述导套内壁滑动连接固定杆,所述升降板上安装有第一轴承座,所述第一轴承座内壁通过轴承转动连接转动杆,所述转动杆顶端通过销轴转动连接第一电动伸缩杆,所述转动杆外壁通过销轴转动连接第二电动伸缩杆,所述转动杆转动连接第二伺服电机的输出轴;
9.所述缓冲装置包括第三伺服电机和箱体,所述第三伺服电机的输出轴固定连接转轴,所述转轴一端通过螺栓连接第四电动伸缩杆,所述第四电动伸缩杆一端通过螺栓连接缓冲筒,所述箱体底端插接支撑座,所述支撑座上开设有空腔,所述支撑座底端固定连接支撑板,所述转轴外壁通过轴承转动连接第一电动伸缩杆。
10.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述支撑组件包括底板,所述底板底端固定安装有万向轮,所述万向轮顶端通过螺栓连接支撑柱,所述支撑柱顶端通过螺栓连接支撑板,所述支撑板上固定安装有支撑杆,所述支撑杆顶端外壁固定连接横杆。
11.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述升降板上开设有第一通孔和第二通孔,所述导套插入第一通孔中,所述动力螺母
插入第二通孔中,所述导套、动力螺母均通过螺栓与升降板进行固定。
12.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述第二伺服电机的输出轴固定连接第一齿轮,所述第一齿轮啮合连接第二齿轮,所述第二齿轮固定安装在转动杆上。
13.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述螺纹杆顶端通过轴承转动连接第二轴承座,所述第二轴承座顶端固定连接横杆,所述转动杆外壁通过轴承转动连接l形支撑杆,所述l形支撑杆底端通过螺栓连接升降板。
14.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述固定杆顶端固定连接横杆,所述固定杆底端固定连接支撑板。
15.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述采摘机构包括u形支架,所述u形支架通过螺栓连接第三电动伸缩杆,所述第三电动伸缩杆外壁滑动连接矩形框,所述矩形框外壁固定连接短杆,所述短杆一端通过螺栓连接u形支架,所述矩形框两端均通过销轴转动连接驱动臂,所述驱动臂内壁通过销轴转动连接拉杆,所述拉杆一端通过销轴转动连接驱动块,所述驱动块外壁固定连接所述第三电动伸缩杆。
16.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述驱动臂内壁滑动连接销杆,所述销杆一端固定连接限位盘,另一端固定连接夹板,所述销杆外壁上套设有弹簧。
17.作为本发明所述的一种基于机器视觉的自动避障的采摘机器人的一种优选方案,其中:所述控制系统包括指令集合模块、临时存储模块、控制器、摄像头、图像获取模块、存储模块和对比分析模块。
18.一种控制基于机器视觉的自动避障的采摘机器人的方法,具体包括以下步骤:
19.s1,在存储模块中存储需要采摘的水果的图像,摄像头拍摄照片,图像获取模块将拍摄的图像存储到临时存储模块中,对比分析模块对图像进行分析,如果不是水果,则进行避障,如果是水果,则进行采摘;
20.s2,启动第一伺服电机,带动螺纹杆旋转,从而带动升降板升降,进而带动缓冲装置上升;
21.s3,启动第二伺服电机,第二伺服电机的输出轴带动第一齿轮旋转,从而带动第二齿轮旋转,进而带动转动杆旋转,最终带动缓冲装置旋转,第二电动伸缩杆伸缩带动第一电动伸缩杆旋转,实现对缓冲装置的角度的调节,第一电动伸缩杆伸缩带动缓冲装置进行伸缩;
22.s4,当缓冲装置移动到水果旁时,第三电动伸缩杆收缩,带动驱动块移动,从而使两个驱动臂闭合,利用夹板将水果夹住,第一电动伸缩杆收缩将水果拽下来;
23.s5,同时,第三伺服电机的输出轴带动转轴旋转,从而带动缓冲筒旋转,第四电动伸缩杆进行伸缩,直至缓冲筒位于缓冲装置下方,第三电动伸缩杆伸长以释放对水果的夹持,水果落入缓冲筒中;
24.s6,当缓冲筒盛满时,第三伺服电机旋转,打开缓冲筒底部的支撑板,从而将水果落入箱体中。
25.与现有技术相比:
26.1、通过设置驱动装置,能够带动采摘机构进行任意位置的移动,能够实现任意位置的水果的采摘,并通过设置的采摘机构,在控制系统的辅助下,能够快速对水果进行采摘;
27.2、通过设置缓冲装置,同步与采摘装置进行工作,采摘后的水果先放入缓冲筒中,延长了采摘机构的有效工作时间,大大提升了采摘速度和效率。
附图说明
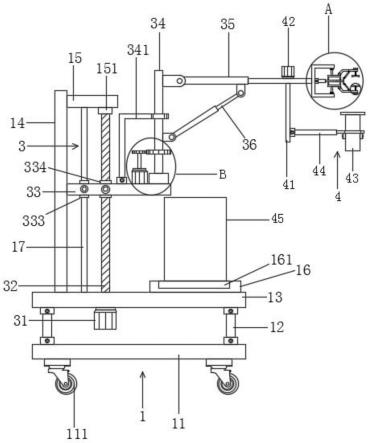
28.图1为本发明提供的结构示意图;
29.图2为本发明提供的图1中a处放大图;
30.图3为本发明提供的图1中b处放大图;
31.图4为本发明提供的图2中c处放大图;
32.图5为本发明提供的缓冲装置的局部示意图;
33.图6为本发明提供的升降板的俯视图;
34.图7为本发明提供的控制系统的模块图。
35.图中:支撑组件1、底板11、万向轮111、支撑柱12、支撑板13、支撑杆14、横杆15、第二轴承座151、支撑座16、空腔161、固定杆17、驱动装置3、第一伺服电机31、螺纹杆32、升降板33、第一通孔331、第二通孔332、导套333、动力螺母334、转动杆34、l形支撑杆341、第一轴承座342、第一电动伸缩杆35、第二电动伸缩杆36、第二伺服电机37、第一齿轮371、第二齿轮38、采摘机构300、u形支架301、第三电动伸缩杆302、矩形框303、驱动臂304、夹板306、拉杆307、驱动块308、短杆312、销杆313、限位盘314、弹簧315、缓冲装置4、转轴41、第三伺服电机42、缓冲筒43、第四电动伸缩杆44、箱体45。
具体实施方式
36.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式做进一步的详细描述。
37.本发明提供一种基于机器视觉的自动避障的采摘机器人,请参阅图1-7,包括支撑组件和控制系统,所述支撑组件上安装有驱动装置,所述驱动装置上安装有采摘机构和缓冲装置;
38.所述驱动装置包括第一伺服电机,所述第一伺服电机的输出轴固定连接螺纹杆,所述螺纹杆外壁螺纹连接动力螺母,所述动力螺母嵌入升降板中,所述升降板上安装有导套,所述导套内壁滑动连接固定杆,所述升降板上安装有第一轴承座,所述第一轴承座内壁通过轴承转动连接转动杆,所述转动杆顶端通过销轴转动连接第一电动伸缩杆,所述转动杆外壁通过销轴转动连接第二电动伸缩杆,所述转动杆转动连接第二伺服电机的输出轴;
39.所述缓冲装置包括第三伺服电机和箱体,所述第三伺服电机的输出轴固定连接转轴,所述转轴一端通过螺栓连接第四电动伸缩杆,所述第四电动伸缩杆一端通过螺栓连接缓冲筒,所述箱体底端插接支撑座,所述支撑座上开设有空腔,所述支撑座底端固定连接支撑板,所述转轴外壁通过轴承转动连接第一电动伸缩杆。
40.所述支撑组件包括底板,所述底板底端固定安装有万向轮,所述万向轮顶端通过螺栓连接支撑柱,所述支撑柱顶端通过螺栓连接支撑板,所述支撑板上固定安装有支撑杆,
所述支撑杆顶端外壁固定连接横杆,其特征在于,所述升降板上开设有第一通孔和第二通孔,所述导套插入第一通孔中,所述动力螺母插入第二通孔中,所述导套、动力螺母均通过螺栓与升降板进行固定,其特征在于,所述第二伺服电机的输出轴固定连接第一齿轮,所述第一齿轮啮合连接第二齿轮,所述第二齿轮固定安装在转动杆上,其特征在于,所述螺纹杆顶端通过轴承转动连接第二轴承座,所述第二轴承座顶端固定连接横杆,所述转动杆外壁通过轴承转动连接l形支撑杆,所述l形支撑杆底端通过螺栓连接升降板,其特征在于,所述固定杆顶端固定连接横杆,所述固定杆底端固定连接支撑板。
41.所述采摘机构包括u形支架,所述u形支架通过螺栓连接第三电动伸缩杆,所述第三电动伸缩杆外壁滑动连接矩形框,所述矩形框外壁固定连接短杆,所述短杆一端通过螺栓连接u形支架,所述矩形框两端均通过销轴转动连接驱动臂,所述驱动臂内壁通过销轴转动连接拉杆,所述拉杆一端通过销轴转动连接驱动块,所述驱动块外壁固定连接所述第三电动伸缩杆,其特征在于,所述驱动臂内壁滑动连接销杆,所述销杆一端固定连接限位盘,另一端固定连接夹板,所述销杆外壁上套设有弹簧。
42.一种控制基于机器视觉的自动避障的采摘机器人的方法,具体包括以下步骤:
43.s1,在存储模块中存储需要采摘的水果的图像,摄像头拍摄照片,图像获取模块将拍摄的图像存储到临时存储模块中,对比分析模块对图像进行分析,如果不是水果,则进行避障,如果是水果,则进行采摘;
44.s2,启动第一伺服电机31,带动螺纹杆32旋转,从而带动升降板33升降,进而带动缓冲装置4上升;
45.s3,启动第二伺服电机37,第二伺服电机37的输出轴带动第一齿轮371旋转,从而带动第二齿轮38旋转,进而带动转动杆34旋转,最终带动缓冲装置4旋转,第二电动伸缩杆36伸缩带动第一电动伸缩杆35旋转,实现对缓冲装置4的角度的调节,第一电动伸缩杆35伸缩带动缓冲装置4进行伸缩;
46.s4,当缓冲装置4移动到水果旁时,第三电动伸缩杆302收缩,带动驱动块308移动,从而使两个驱动臂304闭合,利用夹板306将水果夹住,第一电动伸缩杆35收缩将水果拽下来;
47.s5,同时,第三伺服电机42的输出轴带动转轴41旋转,从而带动缓冲筒43旋转,第四电动伸缩杆44进行伸缩,直至缓冲筒43位于缓冲装置4下方,第三电动伸缩杆302伸长以释放对水果的夹持,水果落入缓冲筒43中;
48.s6,当缓冲筒43盛满时,第三伺服电机42旋转,打开缓冲筒43底部的支撑板,从而将水果落入箱体45中。
49.虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1