一种利用热能高温效应杀灭杂草的方法及装置与流程
1.本发明涉及农林业植保技术,尤其涉及一种利用热能高温效应杀灭杂草的方法及装置。
背景技术:
2.农田和林果地是人们为了某种目的而建立起来的人工生态系统,这个人工生态系统拥有自然生态系统不具有的优越性,使得在农田或林果地的目标植物生长茂盛,包括非种植目标植物,创造优越生长条件的措施有定期翻地、松土、施肥、浇水等让农业生态系统内的目标植物按照人们的意愿生长,以期符合人们的种植、收获目标。但是,杂草是伴随作物生长的,由于人们长期在农田和林果地进行除草作业,杂草的生活力、适应性逐渐变得很强悍,通过调整自身遗传和自然选择逐渐适应了人们的各种除草措施。在化学除草剂问世前,人们只能用手去拔除农业生态系统的杂草,或者用锄头铲除杂草,让更多的光、热、水、肥、气资源被栽培植物所利用。杂草的种类是繁多的,即使同类杂草也是有差异的,生长发育进度各不相同,一次除草,不能将所有的杂草除干净,而且更为重要的是,人工除草,效率很低,杂草通过以下途径获得了比栽培植物更强的生长、传播能力,避免被人们消灭在农田,一是杂草的种子形成休眠特性,种子成熟落入土壤,在适宜条件下,种子不发芽,具有后熟现象,若干年后才会发芽,这无疑增加了除草的难度,而杂草也获得了避免一次性发芽出苗被人们消灭的风险;二是农田中的杂草,生长条件优越,一季生长,能够产生大量的种子,即杂草的繁殖系数很高,通过炸裂、动物携带和搬运等传播到远处;三是杂草种子成熟期不一致,避免被人们一次消灭,总有一部分杂草可以结籽;四是人们的除草措施不会同时同步,这时总有一些地块的杂草能够结籽,利用动物携带等方法传播,保持物种的延续。人工除草有一个好处就是没有向农田生态系统引入有害的化学物质,没有任何环境污染,是生态农业、有机农业农事操作的重要组成内容。
3.化学除草剂问世后,有力地支援了世界“绿色革命”的发展,无论粮食单产还是总产量达到前所未有的历史水平,同时也让世界人口达到前所未有的数量,一片兴兴向荣的景象。化学除草剂利用抑制或阻断生物某代谢过程达到杀灭杂草的目的,如草甘膦铵盐(商品名农达)被植物内吸传导到所有器官,阻断氮代谢而让植物枯死,有“见绿就杀”的美誉。化学除草剂的大量使用,草害得到了控制,但是环境污染问题来了,残留农药通过食物链传递到粮食、水果、肉类中,而且还存在生物积累和放大效应,严重地威胁到人类的健康。在化学除草剂杀灭杂草的时候,杂草迟早会出现抗、耐性。人们不得不从千千万万的化合物中寻找能够杀灭杂草的新的化学除草剂,这个过程仅仅比屠呦呦寻找抗疟药物简单了一点点。
4.杂草和种子是一种生物有机体,里面含有水分、有机物、无机盐等,有特定的组织结构,不管任何形式的结构,面对高温的激光束或聚焦的太阳光,是毫无抵抗能力的,瞬间将杂草体内的水分蒸发,破坏水分、养分的输送通道,除草策略配合得当,杂草和地表种子必死,这种利用热能高温效应杀灭杂草的方法,杂草不会产生抗、耐性。如果草甘膦铵盐有“见绿就杀”的美誉,高温的激光束扫描和聚焦后的太阳光则能对农田所遇到有生命的“活
物”实现“格杀勿论”,能够实现农田生态系统的净化,只允许作物生长的效果,而不会对农田生态系统有任何污染,是一种环境友好、可持续发展利用的技术。
技术实现要素:
5.有鉴于此,本发明实施例提供一种利用热能高温效应杀灭杂草的方法及装置,能够提升除草效率,避免对农业生态环境的污染。
6.本发明实施例提供一种利用热能高温效应杀灭杂草的装置,包括:壳体、菲涅尔透镜体、摄像头、螺旋桨组件、控制器、支架,其中,
7.壳体下部安装有用于支撑利用热能高温效应杀灭杂草的装置的支架;
8.摄像头安装在壳体下部;
9.壳体的两侧安装有螺旋桨组件;
10.壳体上部安装有用于对太阳的光线进行汇聚以形成高温聚光焦点的菲涅尔透镜体;
11.控制器设置在壳体内,通过线缆分别与菲涅尔透镜体、摄像头、螺旋桨组件相连。
12.优选地,所述菲涅尔透镜体为由多圈同心圆环组成的片状菲涅尔透镜体。
13.优选地,所述螺旋桨组件包括:第一螺旋桨叶、第一螺旋转轴、第二螺旋桨叶、第二螺旋转轴、第三螺旋桨叶、第三螺旋转轴、第四螺旋桨叶、第四螺旋转轴、方位调节器、微型电机、蓄电池,其中,
14.第一螺旋桨叶为对称的多片桨叶,分别设置在第一螺旋转轴的侧面,并沿第一螺旋转轴的侧面可旋转;
15.第二螺旋桨叶为对称的多片桨叶,分别设置在第二螺旋转轴的侧面,并沿第二螺旋转轴的侧面可旋转,第二螺旋桨叶的尺寸小于第一螺旋桨叶;
16.第二螺旋转轴设置在第一螺旋转轴的顶部;
17.第一螺旋转轴的底部与微型电机的输出轴相连,微型电机的输入与蓄电池相连;
18.方位调节器,分别与第一螺旋桨叶、第二螺旋桨叶、第二螺旋桨叶及第四螺旋桨叶相连,依据接收的飞行控制信息,调节第一螺旋桨叶在第一螺旋转轴的旋转角度,和/或,调节第二螺旋桨叶在第二螺旋转轴的旋转角度。
19.优选地,还包括:
20.遥控器,通过内置的无线收发器与控制器相连。
21.优选地,所述摄像头还用于在菲涅尔透镜体进行高温杀灭杂草时,对除草的场景进行摄像,并将摄像得到的除草视频通过控制器传输至遥控器;
22.遥控器设置有可视遥控面板,可视遥控面板对接收的除草图像进行展示,接收操作人员依据展示的除草图像对飞行路线进行微调的飞行路线遥控指令,传输至控制器;
23.控制器,还用于在接收到飞行路线遥控指令后,终止对作物以及杂草区域的识别,将飞行路线遥控指令输出至螺旋桨组件,以使螺旋桨组件依据飞行路线遥控指令进行飞行。
24.优选地,所述摄像头对作物种植区域进行摄像,将摄像得到的种植区域图像通过线缆输出至控制器;控制器通过线缆与摄像头相连,依据线缆传输的种植区域图像,识别出作物以及杂草区域,对识别出的杂草区域进行定位,生成用于对杂草区域进行巡航的飞行
控制信息,将飞行控制信息通过线缆输出至螺旋桨组件;螺旋桨组件依据飞行控制信息,控制利用热能高温效应杀灭杂草的装置的飞行路线;菲涅尔透镜体,对太阳光线进行汇聚,形成高温聚光焦点(由于菲涅尔透镜一旦制作完成,其焦距是一定的,如1300mm,飞行过程中,只要保证菲涅尔透镜与地面聚光焦点保持该焦距的距离就可以起到高温杀灭杂草的作用,飞行高度基本是一定的,飞行高度由形成高温聚光焦点来决定,利用高温聚焦的光线杀灭杂草的方法属于茎叶处理类型的利用热能高温效应杀灭杂草的方法,只要是露出地面的杂草器官,均能杀死而达到除草的目的),对飞行路线上的杂草进行高温除草。
25.本发明实施例提供一种利用热能高温效应杀灭杂草的方法,包括:
26.获取对作物种植区域进行摄像得到的种植区域图像;
27.识别出种植区域图像中包含作物以及杂草区域,对识别出的杂草区域进行定位,依据定位的杂草区域生成用于对杂草区域进行巡航的飞行控制信息;
28.依据飞行控制信息控制利用热能高温效应杀灭杂草的装置的飞行路线;
29.利用菲涅尔透镜体对照射的光线进行聚焦形成的高温聚光斑,对飞行路线上的杂草进行高温杀灭。
30.优选地,所述对识别出的杂草区域进行定位,依据定位的杂草区域生成用于对杂草区域进行巡航的飞行控制信息,包括:
31.针对种植作物的每一行,依据该行中作物覆盖的区域,生成该行对应的作物生长区域,对作物生长区域之外的区域进行定位,并生成用于在行间进行巡航的飞行行间控制信息。
32.优选地,所述对识别出的杂草区域进行定位,依据定位的杂草区域生成用于对杂草区域进行巡航的飞行控制信息,包括:
33.针对种植作物的每一行,依据该行中相邻两行覆盖的区域,生成相邻作物生长区域,对该相邻两行之间的相邻作物生长区域之外的区域进行定位,并生成用于在相邻两行间进行巡航的相邻两行飞行控制信息。
34.优选地,还包括:
35.获取进行高温除草时摄像得到的除草视频;
36.依据除草视频中高温聚光斑的位置与预设位置的差异,生成对飞行路线进行微调的飞行路线遥控指令;
37.依据飞行路线遥控指令调整所述飞行路线。
38.本发明实施例提供的一种利用热能高温效应杀灭杂草的方法及装置,装置包括:壳体、菲涅尔透镜体、摄像头、螺旋桨组件、控制器、支架,其中,壳体下部安装有用于支撑利用热能高温效应杀灭杂草的装置的支架;摄像头安装在壳体下部;壳体的两侧安装有螺旋桨组件;壳体上部安装有用于对照射的光线进行聚焦以形成高温聚光斑的菲涅尔透镜体;控制器设置在壳体内,通过线缆分别与菲涅尔透镜体、摄像头、螺旋桨组件相连。这样,利用菲涅尔透镜体聚焦形成的高温聚光斑,能够有效杀死杂草的茎、叶、地上的生长点、落在地面的杂草籽粒以及病虫卵,防止杂草的生长,提升除草效率,同时有效避免除草剂对农业生态环境的污染,是一项造福子孙、可持续发展的实用技术。
39.扫雷式高温激光束扫描利用热能高温效应杀灭杂草的方法及设备,在杂草易控制时期除草,杂草生长薄弱阶段进行除草,以达到事半功倍的效果,如杂草已成势,利用热能
高温效应杀灭杂草的装置,破坏生长,不让杂草开花结籽等,如果激光利用热能高温效应杀灭杂草的方法功率得当,对付农田杂草及有害生物真是有“格杀勿论”的效果。
40.扫雷式高温激光束除草装置含有下列结构部件,背负式发电机或可充电电池组、电缆、手握杆、高温激光器、激光器固定头、控制激光器固定头转动的拉杆,其中背负式发电机或可充电电池组与手握杆相连接并给高温激光器供电。激光器固定头可以在人控制下转动,以适应作物茎秆根区灵活除草需要。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
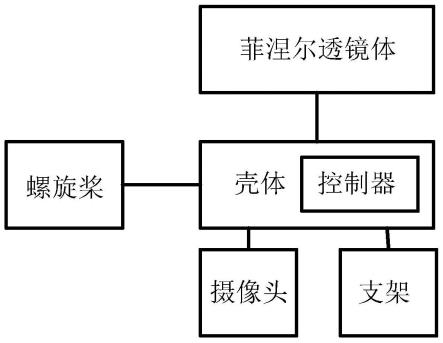
42.图1为本发明的利用热能高温效应杀灭杂草的装置结构示意图;
43.图2为本发明实施例的菲涅尔透镜体结构示意图;
44.图3为本发明实施例的螺旋桨组件结构示意图;
45.图4为本发明的利用热能高温效应杀灭杂草的方法流程示意图;
46.图5为本发明实施例的扫雷式高温激光束除草装备结构示意图。
具体实施方式
47.下面结合附图对本发明实施例进行详细描述。
48.应当明确,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
49.图1为本发明的利用热能高温效应杀灭杂草的装置结构示意图。如图1所示,该利用热能高温效应杀灭杂草的装置包括:壳体、菲涅尔透镜体、摄像头、螺旋桨组件、控制器、支架,其中,
50.壳体下部安装有用于支撑利用热能高温效应杀灭杂草的装置的支架;
51.摄像头安装在壳体下部;
52.壳体的两侧安装有螺旋桨组件;
53.壳体上部安装有用于对太阳光线进行聚焦以形成高温聚光斑的菲涅尔透镜体,菲涅尔透镜体平面根据太阳偏移可动调整,以保证菲涅尔透镜体与太阳光线垂直,达到最佳聚光效果;
54.控制器设置在壳体内,通过线缆分别与菲涅尔透镜体、摄像头、螺旋桨组件相连。
55.本发明实施例中,摄像头对作物种植区域进行摄像,将摄像得到的种植区域图像通过线缆输出至控制器;控制器通过线缆与摄像头相连,依据线缆传输的种植区域图像,识别出作物以及杂草区域,对识别出的杂草区域进行定位,生成用于对杂草区域进行巡航的飞行控制信息,将飞行控制信息通过线缆输出至螺旋桨组件;螺旋桨组件依据飞行控制信息,控制利用热能高温效应杀灭杂草的装置的飞行路线;菲涅尔透镜体,对照射的光线进行汇聚,形成高温聚光斑,对飞行路线上的杂草进行高温杀灭。
56.本发明实施例中,作为一可选实施例,控制器预先通过机器学习算法,以包含作物的样本图像、不包含作物的样本图像以及包含作物和杂草的样本图像等作为样本,进行训练,生成作物识别模型,在对种植区域图像进行作物以及杂草区域识别时,若确定种植区域图像中不包含作物,表明该种植区域未种植有作物,则降落至起飞区域或附近可降落区域,并通知预设的操作人员。
57.本发明实施例中,对于每行识别出的库拉索芦荟,作为一可选实施例,针对每一行,依据该行中各库拉索芦荟覆盖的区域,生成该行对应的库拉索芦荟生长区域,以使菲涅尔透镜体汇聚形成的高温聚光斑位于库拉索芦荟生长区域外,从而避免对库拉索芦荟的影响;作为另一可选实施例,针对每一行,依据该行中相邻两库拉索芦荟覆盖的区域,生成相邻库拉索芦荟生长区域,以使菲涅尔透镜体汇聚形成的高温聚光斑位于相邻库拉索芦荟生长区域外,这样,可以实现更为精确的除草。
58.本发明实施例中,菲涅尔透镜体具有质量轻、薄、聚光效率高的特性。作为一可选实施例,菲涅尔透镜体为由多圈同心圆环组成的片状菲涅尔透镜体,如图2所示,图2为本发明实施例的菲涅尔透镜体结构示意图。将凸透镜进行转化,制作为图2所示的菲涅尔透镜,凸透镜的曲面被完整地保留,但比凸透镜变薄变轻了,用材更省,如果沿着中心旋转一圈,就有同心环状结构了,而且聚光效果要比凸透镜表现优良。
59.本发明实施例中,作为一可选实施例,片状菲涅尔透镜体形成的高温聚光斑的温度达到200℃以上,这样,该温度能够有效杀死杂草的茎、叶、生长点、落在地面的杂草籽粒以及病虫卵,在有效去除杂草,降低杂草二次生长的同时,能够有效降低作物的病虫害,净化农田生态系统。
60.本发明实施例中,作为一可选实施例,螺旋桨组件的数量为4,图3为本发明实施例的螺旋桨组件结构示意图,每一螺旋桨组件包括:第一螺旋桨叶、第一螺旋转轴、第二螺旋桨叶、第二螺旋转轴、方位调节器(图中未示出)、微型电机、蓄电池,其中,
61.第一螺旋桨叶为对称的多片桨叶,分别设置在第一螺旋转轴的侧面,并沿第一螺旋转轴的侧面可旋转;
62.第二螺旋桨叶为对称的多片桨叶,分别设置在第二螺旋转轴的侧面,并沿第二螺旋转轴的侧面可旋转,第二螺旋桨叶的尺寸小于第一螺旋桨叶;
63.第二螺旋转轴设置在第一螺旋转轴的顶部;
64.第一螺旋转轴的底部与微型电机的输出轴相连,微型电机的输入与蓄电池相连;
65.方位调节器,分别与第一螺旋桨叶以及第二螺旋桨叶相连,依据接收的飞行控制信息,调节第一螺旋桨叶在第一螺旋转轴的旋转角度,和/或,调节第二螺旋桨叶在第二螺旋转轴的旋转角度。
66.本发明实施例中,通过第一螺旋桨叶以及第二螺旋桨叶,可以实现精确的飞行路线。通过方位调节器调整第一螺旋桨叶在第一螺旋转轴侧面的旋转角度,以及,第二螺旋桨叶在第二螺旋转轴侧面的旋转角度,可实现装置飞行方位的调整。
67.本发明实施例中,作为一可选实施例,微型电机通过蓄电池供电,其中,蓄电池包括但不限于:太阳能电池、化学能电池、锂离子电池、氢镍电池。
68.本发明实施例中,片状菲涅尔透镜体汇聚的光束,可以覆盖田间行距,利用摄像机拍摄的图像,进行作物识别,将识别出的库拉索芦荟之外的植物作为目标,对目标进行自动
对焦,对准行间除草,可以杀灭表土杂草种子以及杂草植株,有效防止杂草的重生,除草过程可以实现零排放、无污染、是环境友好型的利用热能高温效应杀灭杂草的方法,符合现代生态、有机农业发展趋势,可以有效提升作物产量与品质,进而提升经济产量和效益;另外,利用热能高温效应杀灭杂草的装置飞翔在空中,利用菲涅尔透镜体汇聚光斑进行除草,可以避免对农田的干扰,尤其适用于光热资源丰富的地区。
69.本发明实施例中,在利用热能高温效应杀灭杂草的装置实现自动除草的基础上,还可以实现对利用热能高温效应杀灭杂草的装置的远程控制,因而,作为一可选实施例,该利用热能高温效应杀灭杂草的装置还包括:
70.遥控器,通过内置的无线收发器与控制器相连。
71.本发明实施例中,遥控器通过无线收发器与控制器进行通信,例如,遥控器可以控制利用热能高温效应杀灭杂草的装置的启动、关停以及飞行路线微调。
72.本发明实施例中,作为一可选实施例,摄像头还用于在菲涅尔透镜体进行高温除草时,对除草的场景进行摄像,并将摄像得到的除草视频通过控制器传输至遥控器;
73.遥控器设置有可视遥控面板,可视遥控面板对接收的除草图像进行展示,接收操作人员依据展示的除草图像对飞行路线进行微调的飞行路线遥控指令,传输至控制器;
74.控制器,还用于在接收到飞行路线遥控指令后,终止对作物以及杂草区域的识别,将飞行路线遥控指令输出至螺旋桨,以使螺旋桨依据飞行路线遥控指令进行飞行。
75.本发明实施例中,摄像头在菲涅尔透镜体进行高温除草时,对除草的场景进行摄像,并将摄像得到的除草视频通过控制器传输至遥控器,在遥控器的可视遥控面板上展示实时拍摄的除草视频,以使操作人员依据展示的除草视频确认除草效率,并在除草效率不满足预设效率时,例如,高温聚光斑太靠近作物,可能对作物造成损害,或者,高温聚光斑远离作物,未能有效杀灭作物周围的杂草,对利用热能高温效应杀灭杂草的装置的飞行路线进行微调,从而向控制器传输飞行路线遥控指令,这样,通过操控可视遥控面板,可以实现操作人员在地头树荫下操控利用热能高温效应杀灭杂草的装置,使之在田间上空飞翔,达到精确除草的作用。
76.本发明实施例中,控制器在未接收到遥控器发送的飞行路线遥控指令之前,通过依据种植区域图像生成的飞行控制信息,对利用热能高温效应杀灭杂草的装置的飞行姿态进行控制,在接收到飞行路线遥控指令后,则终止对库拉索芦荟以及杂草区域的识别,将飞行路线遥控指令输出至螺旋桨,以使螺旋桨直接依据飞行路线遥控指令,对利用热能高温效应杀灭杂草的装置的飞行姿态进行控制。
77.本发明实施例的利用热能高温效应杀灭杂草的装置,适合除去非密植矮秆作物行间杂草,也可用于除垄间杂草,实用性强。
78.本发明实施例中,作为一可选实施例,串联或并联高温激光器发生器安装在可旋转条状固持结构上,以适应任何除草场景,如垄作作物,林地,只要是非密植农、林作物就能使用不局限于芦荟这一种经济作物上。
79.本发明实施例中,作为一可选实施例,除草工作条为条块状结构,这样,便于在农田植株间移动。可在光束功率为10kw时,扫过地面,对农田里的杂草、病原物、虫卵等进行杀灭,净化农田生态系统。
80.本发明实施例中,条形除草块的面积大于激光束发生器形成的面积,可以防止反
射激光对操作员眼睛的伤害,并设置激光束与条形除草块的外盘面的距离,以防止烧伤作物茎秆。
81.本发明实施例中,作为一可选实施例,也可以通过手握杆操作除草块。
82.本发明实施例中,作为一可选实施例,菲涅尔透镜由于焦距的限制,设置为1300mm焦距、正方形,1.10米
×
1.10米=1.21平方米、7公斤重、功率为1654w=1367w/平方米(太阳常数)
×
1.21平方米,固定在一个正方形支架上,70mm的圆形聚光斑瞬时能形成800摄氏度以上的高温,任何杂草的地上部分无法忍受这样的高温杀灭,包括在地面上的杂草种子。
83.本发明实施例中,作为一可选实施例,该装置还可以包括:
84.氢气球(图中未示出),用于将壳体悬空吊起,或者与壳体相连接,作为一个整体漂浮在空中适当位置进行聚光高温除草作业,呈圆柱形,水平设置,两头尖。整个装置的绝大部分重量由氢气球承担,节省蓄电池电能,增加除草装置飞行工作时间,基于此,氢气球的形状包括但不限于前面描述形状。
85.本发明实施例中,氢气球体积约为7.5立方米,为了避免风吹走气球,气球形状为圆柱形,并水平设置在装置上,两头尖,以减少风吹产生的力。为了防止氢气球对菲涅尔透镜遮光,数量设置为两个及以上,用一根轻质杆撑开。这样,可以有效降低操作人员的负重。
86.图4为本发明的利用热能高温效应杀灭杂草的方法流程示意图。如图4所示,该方法包括:
87.步骤401,获取对作物种植地块进行摄像得到的种植区域图像;
88.本发明实施例中,利用利用热能高温效应杀灭杂草的装置上设置的摄像头,对作物种植区域进行摄像,得到种植区域图像。
89.步骤402,识别出种植区域图像中包含作物以及杂草区域,对识别出的杂草区域进行定位,依据定位的杂草区域生成用于对杂草区域进行巡航的飞行控制信息;
90.本发明实施例中,作为一可选实施例,利用预先构建的作物识别模型进行作物以及杂草区域识别。其中,作物识别模型通过机器学习算法,以包含作物的样本图像、不包含作物的样本图像以及包含库拉索芦荟和杂草的样本图像等作为样本,进行训练得到。
91.步骤403,依据飞行控制信息控制利用热能高温效应杀灭杂草的装置的飞行路线;
92.本发明实施例中,利用热能高温效应杀灭杂草的装置中的螺旋桨组件依据飞行控制信息进行飞行。
93.步骤404,利用菲涅尔透镜体对照射的光线进行汇聚形成的高温聚光斑,对飞行路线上的杂草进行高温杀灭。
94.本发明实施例中,利用热能高温效应杀灭杂草的装置中的菲涅尔透镜体对太阳的光线进行汇聚,形成高温聚光斑,对飞行路线上的杂草进行高温杀灭。作为一可选实施例,高温聚光斑的温度达到200℃以上(温度高除草速度快)。
95.本发明实施例中,作为一可选实施例,利用通过机器学习算法构建的作物识别模型,对种植区域图像进行库拉索芦荟以及杂草区域识别。
96.本发明实施例中,作为一可选实施例,对识别出的杂草区域进行定位,依据定位的杂草区域生成用于对杂草区域进行巡航的飞行控制信息,包括:
97.针对种植作物的每一行,依据该行中各作物覆盖的区域,生成该行对应的作物生长区域,对作物生长区域之外的区域进行定位,并生成用于在行间进行巡航的飞行行间控
制信息。
98.本发明实施例中,作为另一可选实施例,对识别出的杂草区域进行定位,依据定位的杂草区域生成用于对杂草区域进行巡航的飞行控制信息,包括:
99.针对种植作物的每一行,依据该行中相邻两行覆盖的区域,生成相邻作物生长区域,对该相邻两行之间的相邻作物生长区域之外的区域进行定位,并生成用于在相邻两行作物间进行巡航的相邻两行作物飞行控制信息。
100.本发明实施例中,作为一可选实施例,该方法还包括:
101.获取进行高温除草时摄像得到的除草视频;依据除草视频中高温聚光斑的位置与预设位置的差异,生成对飞行路线进行微调的飞行路线遥控指令;依据飞行路线遥控指令调整所述飞行路线。
102.本发明实施例中,利用热能高温效应杀灭杂草的装置,通过飞行式聚光高温,利用热能高温效应杀灭杂草,适合矮秆非密植作物,或者高杆作物早期生长阶段,不适用于林果地除草(树冠会遮光,菲涅尔透镜无法实现有效聚光)。作为一可选实施例,针对非密植作物的任何时期,包括林果地、垄作非密植作物,本发明实施例采用扫雷式高温激光束除草装备,通过扫雷式高温激光束,利用热能高温效应杀灭杂草。
103.图5为本发明实施例的扫雷式高温激光束除草装备结构示意图。如图5所示,该装备利用热能高温效应杀灭杂草,包括:可旋转激光除草部件、开关设在发电机上的手握杆、激光除草部件旋转控制杆、电缆、发电机,其中,发电机为背负式发电机,还可以利用移动式可充电电池组或高容量可充电式蓄电池,可旋转激光除草部件设计成条形,而且可以旋转,能够适应不同的作物间距,进行除草。可旋转激光除草部件包括串联或并联式激光发生器,激光发生器与作物茎秆设置有最小的距离d,以保护作物杆径不被烫伤。激光束发生器可拆卸,安装在贴近地面的条形可旋转激光除草部件上,通过来回移动激光束扫描地面杀灭杂草及其种子和一切地面生物(包括微生物、病原生物、昆虫和虫卵,尤其对蝗虫卵有效)。采用条形激光束发生器作业模式,在非密植作物茎秆附近能够灵活游走,杀灭杂草效果更好。
104.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1