一种鞋底鞋面贴合压实装置
1.本实用新型涉及一种鞋底鞋面贴合压实装置。
背景技术:
2.硫化鞋是以橡胶、织物或皮革为帮面,橡胶为底料,用粘贴、模压或注胶等方式加工成型,再在一定温度和压力下进行硫化,赋予鞋帮、鞋底高强度和高弹性,并使二者牢固地结合在一起,故称硫化鞋。但现有硫化鞋在进行鞋底与鞋面贴合时,是通过人工判断贴合位置和选取对应的鞋底,将鞋底与鞋面贴合后,再采用压底机压实。该方式因贴合和上料均是人工作业,导致贴底作业标准化程度低,且贴底质量取决于人工的经验,无法进行标准掌控,还存在劳动强度大、生产效率低、人力成本高的缺陷。
技术实现要素:
3.本实用新型的目的是针对现有技术的不足,提出一种鞋底鞋面贴合压实装置,实现了鞋底与鞋面的自动贴合,标准化作业,提高产品质量,降低人力成本,提高生产效率。
4.本实用新型通过以下技术方案实现:
5.一种鞋底鞋面贴合压实装置,包括操作台,还包括与操作台平行间隔布置的鞋底输送装置、设置在操作台上的鞋面输送装置、控制装置、以及分别与控制装置连接的鞋面信息获取装置、鞋底上料装置和压实装置,鞋面输送装置用于倒向放置鞋面且使其依次经过鞋面信息获取装置、鞋底上料装置和压实装置,鞋面信息获取装置用于扫描鞋面并反馈至控制装置,控制装置根据扫描信息确定鞋面的尺码、左右脚信息以及鞋底在鞋面的贴合位置;鞋底输送装置用于输送与所述尺码及左右脚信息相应的鞋底,鞋底上料装置用于自动从鞋底输送装置获取鞋底,并由控制装置控制调整该鞋底的位置以使其与贴合位置相匹配后,将鞋底与鞋面贴合,压实装置用于将贴合后的鞋底与鞋面进行压实。
6.进一步的,所述鞋面信息获取装置包括设置在操作台上的第一支架、设置在第一支架上可横向水平滑动的第一滑块、设置在第一滑块底部的3d相机、设置在操作台上与第一支架位置对应的第一rfid读写器和设置在鞋面输送装置上的rfid卡,3d相机和第一rfid读写器均与控制装置连接,3d相机位于鞋面上方且由第一滑块带动沿鞋面长度方向对鞋面进行扫描,控制装置根据该扫描数据得到尺码、左右脚信息,以及确定所述贴合位置,并通过第一rfid读写器将尺码、左右脚信息和贴合位置存储至rfid卡内。
7.进一步的,所述鞋底上料装置包括设置在操作台上的第二支架、设置在第二支架上可横向水平滑动的第二滑块、设置在第二滑块上且可竖直滑动的第三滑块、设置在第三滑块底部的转动块、设置在转动块底部的夹具、设置在操作台上且与第二支架位置对应的第二rfid读写器和设置在操作台上的相机,第二、第三滑块、转动块和第二rfid读写器均与控制装置连接,第二滑块带动夹具滑动至鞋底输送装置获取鞋底,相机拍摄获取鞋底后的夹具,控制装置根据相机拍摄信息得到鞋底在夹具上的位置信息,第二rfid读写器读取rfid卡上的贴合位置信息,控制装置根据该信息控制第三滑块和转动块动作,以调整鞋底
位置使其与贴合位置相匹配,再控制夹具将鞋底放置在贴合位置上。
8.进一步的,所述压实装置包括设置在操作台上的第三支架、设置在第三支架上且与控制装置连接的液压缸和与液压缸输出端连接的压实模具,压实模具在液压缸的驱动下,对鞋底施加一定的压力,使鞋底与鞋面压实。
9.进一步的,所述鞋面输送装置包括纵向水平间隔设置在操作台上的三底板、设置在操作台与三底板上的第一皮带、间隔设置在第一皮带上的三固定装置、分别设置在三固定装置上的随行夹具和设置在底板与固定装置之间的升降装置,三固定装置分别与鞋面信息获取装置、鞋底上料装置和压实装置对应,升降装置与控制装置连接,使随行夹具具有上升和下降两个状态。
10.进一步的,所述鞋底输送装置包括与第一皮带平行间隔布置的第二皮带、间隔设置在第二皮带上的多个凸台,所述鞋底放置在凸台上。
11.进一步的,所述升降装置包括设置在底板底部且与控制装置连接的气缸,所述固定装置包括十字连接架、分别设置在十字连接架相对两端与皮带之间的两垫片和设置在十字连接架中心的竖直固定块,所述随行夹具下端固定在竖直固定块上,气缸的两输出端分别与十字连接架的另两端连接。
12.进一步的,所述第一滑块、第二滑块、第三滑块和转动块,分别由对应的伺服电机驱动,各伺服电机均与控制装置连接。
13.本实用新型还通过以下技术方案实现:
14.一种鞋底鞋面贴合压实方法,包括如下步骤:
15.a、鞋面输送装置将鞋面输送至鞋面信息获取装置时,鞋面信息获取装置的3d相机对鞋面沿其长度方向进行扫描并将扫描数据反馈至控制装置,控制装置根据该扫描数据得到尺码、左右脚信息以及确定贴合位置,并通过第一rfid读写器将尺码、左右脚信息和贴合位置存储至rfid卡内;
16.b、鞋面输送装置继续将鞋面输送至鞋底上料装置,第二滑块带动夹具滑动至鞋底输送装置获取鞋底,相机拍摄获取鞋底后的夹具,控制装置根据相机拍摄信息得到鞋底在夹具上的位置信息,第二rfid读写器读取rfid卡上的贴合位置信息,控制装置根据该信息控制第三滑块和转动块动作,以调整鞋底位置使其与贴合位置相匹配,再控制夹具将鞋底放置在贴合位置上;
17.c、鞋面输送装置继续将贴合了鞋底的鞋面输送至压实装置,控制装置控制液压缸驱动压实模具,使其对鞋底施加一定的压力,以使鞋底与鞋面压实。
18.进一步的,所述步骤a中得到尺码、左右脚信息以及确定贴合位置具体为:
19.根据扫描数据,得到鞋面的3d模型,将3d模型进行长度方向的测量得到尺码信息;
20.对3d模型进行内外腰形状的对比分析,得到左右脚信息;
21.将3d模型的底面进行向下的垂直投影,获取与鞋底相似的虚拟鞋底平面模型,记录该模型在随行夹具上的空间位置,该空间位置即为贴合位置。
22.本实用新型具有如下有益效果:
23.1、本实用新型的鞋面信息获取装置扫描鞋面并将扫描数据反馈至控制装置,控制装置根据该扫描数据确定鞋面的尺码、左右脚信息以及鞋底在鞋面的贴合位置,鞋底输送装置则输送与该尺码及左右脚信息相应的鞋底,鞋底上料装置自动从鞋底输送装置获取鞋
底,并由控制装置控制调整该鞋底的位置以使其与贴合位置相匹配后,将鞋底与鞋面贴合,最后由压实装置进行压实,贴合和上料均无需人工参与,完全由机器代工,工序机械化程度高,实现标准化作业,提高产品质量,降低人力成本,提高生产效率。
24.2、鞋面输送装置的升降装置使随行夹具具有上升和下降两个状态,当进行到某工序时,对应的升降装置使随行夹具处于上升状态,该工序结束后,对应的升降装置使随行夹具处于下降状态,如此能够使各工序的操作更为精确。
附图说明
25.下面结合附图对本实用新型做进一步详细说明。
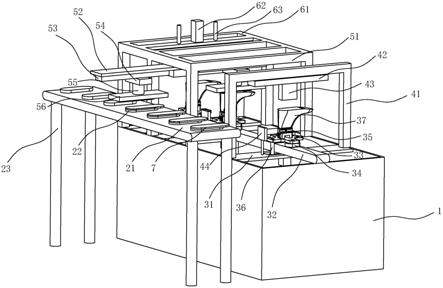
26.图1为本实用新型的结构示意图。
27.图2为本实用新型的结构示意图(去除第一支架)。
28.图3为本实用新型的结构示意图(显示压实装置)。
29.其中,1、操作台;21、第二皮带;22、凸台;23、支撑杆;31、底板;32、第一皮带;33、十字连接架;34、垫片;35、竖直固定块;36、气缸;37、随行夹具;41、第一支架;42、第一滑块;43、3d相机;44、第一rfid读写器;51、第二支架;52、横板;53、第二滑块;54、第三滑块;55、转动块;56、夹具;57、第二rfid读写器;58、相机;61、第三支架;62、液压缸;63、导向杆;64、压实模具;7、鞋底。
具体实施方式
30.图1至图3中,显示出了夹具56在随行夹具37上端和夹具56移动至鞋底输送装置上部获取鞋底7两种状态。如图1至图3所示,鞋底鞋面贴合压实装置包括操作台1、平行间隔布置在操作台1左侧的鞋底输送装置、设置在操作台1上的鞋面输送装置、控制装置、以及分别与控制装置连接的鞋面信息获取装置、鞋底7上料装置、压实装置和显示装置,鞋面输送装置用于倒向放置鞋面且使其依次经过鞋面信息获取装置、鞋底7上料装置和压实装置,鞋面信息获取装置用于扫描鞋面并反馈至控制装置,控制装置根据扫描信息确定鞋面的尺码、左右脚信息以及鞋底7在鞋面的贴合位置;控制装置控制显示装置显示尺码及左右脚信息,人工根据显示的信息,选择对应的鞋底7,通过鞋底输送装置进行输送,鞋底7上料装置用于自动从鞋底输送装置获取鞋底7,并由控制装置控制调整该鞋底7的位置以使其与贴合位置相匹配后,将鞋底7与鞋面贴合,压实装置用于将贴合后的鞋底7与鞋面进行压实。
31.鞋面输送装置包括纵向水平间隔设置在操作台1上的三底板31、设置在操作台1与三底板31上的第一皮带32、间隔设置在第一皮带32上的三固定装置、分别设置在三固定装置上的随行夹具37和设置在底板31与固定装置之间的升降装置,三固定装置分别与鞋面信息获取装置、鞋底7上料装置和压实装置对应,升降装置与控制装置连接,使随行夹具37具有上升和下降两个状态,随行夹具37为倒向鞋模形状,鞋面即套设在该随行夹具37上。
32.升降装置包括设置在底板31底部且与控制装置连接的气缸36,固定装置包括十字连接架33、分别设置在十字连接架33相对两端与皮带之间的两垫片34和设置在十字连接架33中心的竖直固定块35,夹具56下端固定在竖直固定块35上,气缸36的两输出端分别与十字连接架33的另两端连接,底板31开设有供气缸36的伸缩杆穿过的让位孔。
33.鞋面信息获取装置包括设置在操作台1上呈门型的第一支架41、设置在第一支架
41顶部可横向水平滑动的第一滑块42、驱动第一滑块42的伺服电机、设置在第一滑块42底部的3d相机43、设置在第一支架41对应的底板31上的第一rfid读写器44和设置在鞋面输送装置上的rfid卡,3d相机43、第一rfid读写器44和伺服电机均与控制装置连接,3d相机43位于鞋面上方且由第一滑块42带动沿鞋面长度方向对鞋面进行扫描,控制装置根据该扫描数据得到尺码、左右脚信息,以及确定所述贴合位置,并通过第一rfid读写器44将尺码、左右脚信息和贴合位置存储至rfid卡内。
34.鞋底7上料装置包括设置在操作台1上的第二支架51、设置在第二支架51顶部且延伸至鞋底输送装置上部的横板52、设置在横板52上可横向水平滑动的第二滑块53、设置在第二滑块53上且可竖直滑动的第三滑块54、设置在第三滑块54底部的转动块55、设置在转动块55底部的夹具56、设置在与第二支架51对应的底板31上的第二rfid读写器57、设置在该底板31上的相机58、环绕相机58设置的led灯、分别用于驱动第二滑块53、第三滑块54和转动块55的三个伺服电机,三个伺服电机和第二rfid读写器57均与控制装置连接,第二滑块53带动夹具56滑动至鞋底输送装置获取鞋底7,相机58拍摄获取鞋底7后的夹具56,控制装置根据相机58拍摄信息得到鞋底7在夹具56上的位置信息,第二rfid读写器57读取rfid卡上的贴合位置信息,控制装置根据该信息控制第三滑块54和转动块55动作,以调整鞋底7位置使其与贴合位置相匹配,再控制夹具56将鞋底7放置在贴合位置上。在本实施例中,夹具56采用现有技术中具有负压吸力的夹具56,且在竖直方向上具有一定弹性,可实现竖直方向上一定距离的预紧,该弹性的实现可通过在夹具56与转动块55之间设置弹簧或者或者其他弹性材料来实现。
35.压实装置包括设置在操作台1上的第三支架61、设置在第三支架61上且与控制装置连接的液压缸62、与液压缸62输出端连接的压实模具64和设置在第三支架61与压实模具64之间的导向杆63,压实模具64在液压缸62的驱动下,对鞋底7施加一定的压力,使鞋底7与鞋面压实。
36.在本实施例中,第二支架51和第三支架61连接在一起,具体包括四根竖杆、连接在四根竖杆之间的四根第一横杆和间隔设置在两第一横杆之间的三根第二横杆,横板52设置在一根第二横杆底部,液压缸62和导向杆63设置在另一根第二横杆上。
37.鞋底输送装置包括与第一皮带32平行间隔布置的第二皮带21、间隔设置在第二皮带21上的多个凸台22和用于支撑第二皮带21的支撑杆23,鞋底7放置在凸台22上。
38.鞋底鞋面贴合压实方法,包括如下步骤:
39.a、鞋面输送装置将鞋面输送至鞋面信息获取装置时,鞋面信息获取装置的3d相机43对鞋面沿其长度方向进行扫描并将扫描数据反馈至控制装置,控制装置根据该扫描数据得到尺码、左右脚信息以及确定贴合位置,并通过第一rfid读写器44将尺码、左右脚信息和贴合位置存储至rfid卡内;具体为:
40.根据扫描数据,得到鞋面的3d模型,将3d模型进行长度方向的测量得到尺码信息;
41.对3d模型进行内外腰形状的对比分析,得到左右脚信息;具体对比过程为现有技术;
42.将3d模型的底面进行向下的垂直投影,获取与鞋底7相似的虚拟鞋底7平面模型,记录该模型在随行夹具37上的空间位置,该空间位置即为贴合位置;
43.当得到尺码及左右脚信息后,控制装置控制显示装置显示该信息,人工根据该信
息选择对应的鞋底7,将其放在鞋底输送装置的凸台22上进行传输,鞋底输送装置与鞋面输送装置的速度是匹配的;
44.b、鞋面输送装置继续将鞋面输送至鞋底7上料装置,第二滑块53带动夹具56滑动至鞋底输送装置获取鞋底7,相机58拍摄获取鞋底7后的夹具56,控制装置根据相机58拍摄信息得到鞋底7在夹具56上的位置信息,第二rfid读写器57读取rfid卡上的贴合位置信息,控制装置根据该信息控制第三滑块54和转动块55动作,以调整鞋底7位置使其与贴合位置相匹配,再控制夹具56将鞋底7放置在贴合位置上;具体为:
45.夹具56夹取鞋底7后,由第二滑块53带动回到操作台1上方,在这个过程中,相机58即可拍摄到鞋底7并反馈至控制装置,控制装置即可确定鞋底7在夹具56上的位置信息,并将该位置信息与确定的贴合位置信息进行对比,从而求出旋转偏置矩阵,根据该矩阵控制第三滑块54移动和转动块55转动,对鞋底7进行水平方向和竖直方向的调整,以使鞋底7位置与贴合位置相匹配;其中,控制装置根据拍摄数据确定位置信息以及两个位置的对比,采用的是现有的图像处理技术;
46.c、鞋面输送装置继续将贴合了鞋底7的鞋面输送至压实装置,控制装置控制液压缸62驱动压实模具64,使其对鞋底7施加一定的压力,以使鞋底7与鞋面压实,其中,压实模具64为现有技术。
47.在本实施例中,控制装置为plc。
48.以上所述,仅为本实用新型的较佳实施例而已,故不能以此限定本实用新型实施的范围,即依本实用新型申请专利范围及说明书内容所作的等效变化与修饰,皆应仍属本实用新型专利涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1