一种手术用辅助夹持装置的制作方法
1.本实用新型涉及医疗辅助器械技术领域,具体涉及一种手术用辅助夹持装置。
背景技术:
2.目前的手术过程中,内窥镜一般是由一个专门的助手或者用弯臂扶持。人工持镜会增加手术室内的人数,使得本来空间就有限的手术室里面更加拥挤;此外,人手持镜很难适应时间较长的大型手术,因为时间稍长的话,肌肉疲劳,持镜的手会发抖,术者就很难看到清晰稳定的图像。cn111012610a公开了一种蛇形手术器械及内窥镜夹持器,包括底座、蛇形臂、夹持机械手,所述蛇形臂尾部连接底座内部的气动或电动能量源驱动装置,所述蛇形臂端头设有夹持机械手。蛇形臂任意角度可一键操作位置固定,可任意全方位自由活动,任意位置自由固定,调节方便的同时,不受任何外界干涉,完全取代人工扶持;底座及蛇形臂可以在0-180度扇形任意位置内做固定;有效解决现有弯臂结构调节范围受到限制问题,同时为本来就很紧张的手术室内节约空间资源。但该发明的夹持器中,蛇形臂的一端直接与一个夹持机械手相连,使用该夹持器一次仅能夹持一个医疗设备,当手术过程需要使用到多个医疗设备配合时,就需要同时使用多个该类型的夹持器,这样不仅增加了硬件设备的成本,且安装夹持器的工作量增加,同时会占用的太多的空间。因此本申请旨在提供一种可以同时夹持多个医疗设备的辅助夹持机构。
技术实现要素:
3.本实用新型的目的是克服现有技术的上述不足而提供一种手术用辅助夹持装置,可以通过安装底板和支杆结构同时夹持多个医疗设备,每个支杆均可以单独全方位自由调节,增强了整个夹持机构的可调节性和调节精度。
4.本实用新型的技术方案是:一种手术用辅助夹持装置,包括底座、蛇形臂和夹持机构,蛇形臂的尾部连接底座内部的驱动装置,还包括安装底板,安装底板与蛇形臂的头部连接,安装底板上设置有多个夹持机构。
5.进一步的,底座上设有将底座固定在手术床上的锁定机构,锁定机构可以为夹子或螺钉。
6.进一步的,蛇形臂包括连接丝、杆尾和多个套设于连接丝上的支撑件。
7.进一步的,支撑件包括球头连杆和球窝连杆,球头连杆和球窝连杆中间均设有用于连接丝穿过的通孔。
8.进一步的,安装底板与蛇形臂采用活动连接或固定连接。
9.进一步的,安装底板与夹持机构间通过具有伸缩或折叠功能的支杆相连接,优选的,支杆也可以为蛇形臂,这样调节力度更广,也更方便,提高了整个夹持器的调节精度。
10.进一步的,支杆与安装板可拆卸连接,可以根据实际需要安装特定数量的支杆及夹持机构。
11.进一步的,安装底板为矩形平板,矩形平板的侧面与蛇形臂相连接。
12.进一步的,支杆为偶数个,且支杆对称的设置在安装底板上两个对应的表面上,有利于保持重心平衡。
13.与现有技术相比本实用新型的有益效果:本实用新型的手术用辅助夹持装置,可以通过安装底板和支杆结构同时夹持多个医疗设备,每个支杆均可以单独全方位自由调节,增强了整个夹持机构的可调节性和调节精度。
附图说明
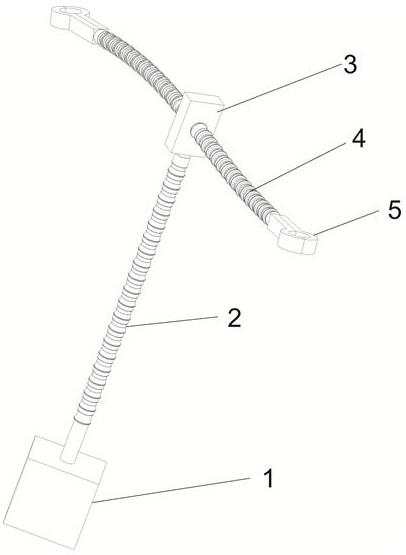
14.图1是本实用新型实施例1的结构示意图;
15.图2是本实用新型实施例2的结构示意图;
16.图中:1-底座,2-蛇形臂,3-安装底板,4-支杆, 5-夹持机构。
具体实施方式
17.以下将结合具体实施例对本实用新型做进一步详细说明,实施例中未具体说明的方法或功能部件均为现有技术。
18.实施例1
19.如图1所示,本实施例是一种手术用辅助夹持装置,包括底座1、蛇形臂2、夹持机构5和安装底板3,蛇形臂2的尾部连接底座1内部的驱动装置,安装底板3与蛇形臂2的头部连接,安装底板3上设置有多个夹持机构5,底座1上设有用于将整个夹持机构5固定在手术床上的锁定机构,锁定机构为夹子。
20.本实施例中的蛇形臂2包括连接丝、杆尾和多个套设于连接丝上的支撑件,支撑件包括球头连杆和球窝连杆,球头连杆和球窝连杆中间均设有用于连接丝穿过的通孔。连接丝一端与底座1内的驱动装置相连,另一端与安装底板3相连,在驱动装置的驱动下,连接丝可以进行伸缩动作;蛇形臂2结构可参考现有技术,在此不作更具体的描述。
21.本实施例中,安装底板3与蛇形臂2采用螺栓固定连接,安装底板3与夹持机构5间通过支杆4相连,支杆具有一定的强度同时也可以适应一定的形变,这样通过支杆4的形变可以对夹持机构5的位置进行更精准的调节,调节更方便。支杆4与安装板采用螺栓可拆卸连接,这样可以根据实际需要安装特定数量的支杆4及夹持机构5。
22.支杆4可以采用蛇形臂2类似的结构,安装板3内部为空腔,支杆4的连接丝一端与夹持机构5连接,另一端穿过安装板3与底座1中的驱动装置相连。
23.本实施例中,安装底板3为矩形平板状,矩形平板的一个侧面与蛇形臂2相连接,支杆4为两个,且支杆4对称的设置在安装底板3上两个对应的表面上。
24.实施例2
25.如图2所示,本实施例与实施例1的主要区别在于:实施例2中的支杆4及夹持机构5有四个。
26.以上仅为本实用新型的部分实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有前述各种技术特征的组合和变型,本领域的技术人员在不脱离本实用新型的精神和范围的前提下,对本实用新型的改进、变型、等同替换,或者将本实用新型的结构或方法用于其它领域以取得同样的效果,都属于本实用新型包括的保护范围。
技术特征:
1.一种手术用辅助夹持装置,包括底座、蛇形臂和夹持机构,蛇形臂的尾部连接底座内部的驱动装置,其特征在于:还包括安装底板,安装底板与蛇形臂的头部连接,安装底板上设置有多个夹持机构。2.根据权利要求1所述的一种手术用辅助夹持装置,其特征在于:所述蛇形臂包括连接丝、杆尾和多个套设于连接丝上的支撑件。3.根据权利要求2所述的一种手术用辅助夹持装置,其特征在于:所述支撑件包括球头连杆和球窝连杆,球头连杆和球窝连杆中间均设有用于连接丝穿过的通孔。4.根据权利要求1所述的一种手术用辅助夹持装置,其特征在于:所述安装底板与蛇形臂采用活动连接或固定连接。5.根据权利要求1所述的一种手术用辅助夹持装置,其特征在于:所述安装底板与夹持机构间通过具有伸缩或折叠功能的支杆相连接。6.根据权利要求5所述的一种手术用辅助夹持装置,其特征在于:所述支杆也为蛇形臂。7.根据权利要求6所述的一种手术用辅助夹持装置,其特征在于:所述支杆与安装板可拆卸连接。8.根据权利要求7所述的一种手术用辅助夹持装置,其特征在于:所述安装底板为矩形平板,矩形平板的侧面与蛇形臂相连接。9.根据权利要求8所述的一种手术用辅助夹持装置,其特征在于:所述支杆为偶数个。10.根据权利要求9所述的一种手术用辅助夹持装置,其特征在于:所述支杆对称的设置在安装底板的表面上。
技术总结
一种手术用辅助夹持装置,包括底座、蛇形臂、夹持机构和安装底板,蛇形臂的尾部连接底座内部的驱动装置,安装底板与蛇形臂的头部连接,安装底板上设置有多个夹持机构。本实用新型的手术用辅助夹持装置,可以通过安装底板和支杆结构同时夹持多个医疗设备,每个支杆均可以单独全方位自由调节,增强了整个夹持机构的可调节性和调节精度。可调节性和调节精度。可调节性和调节精度。
技术研发人员:高飞
受保护的技术使用者:湖南强森医疗科技有限公司
技术研发日:2021.05.24
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1