一种智能水泥混凝土搅拌站品质实时监控系统的制作方法
1.本发明涉及混凝土加工领域,具体的说是一种智能水泥混凝土搅拌站品质实时监控系统。
背景技术:
2.水泥混凝土是指由水泥、砂、石等用水混合结成整体的工程复合材料的统称。通常讲的混凝土一词是指用水泥作胶凝材料,砂、石作集料;与水(加或不加外加剂和掺合料)按一定比例配合,经搅拌、成型、养护而得的水泥混凝土,也称普通混凝土,它广泛应用于土木工程,混凝土主要划分为两个阶段与状态:凝结硬化前的塑性状态,即新拌混凝土或混凝土拌合物;硬化之后的坚硬状态,即硬化混凝土或混凝土;混凝土搅拌站是用来集中搅拌混凝土的联合装置,又称混凝土预制场。由于它的机械化、自动化程度较高,所以生产率也很高,并能保证混凝土的质量和节省水资源,但传统的混凝土搅拌站在进行混凝土的搅拌预制作业过程中,往往会存在以下问题:往往会存在以下问题: 分别从拌料前、拌料中、拌料后三个阶段对混凝土生产进行实时监控。
3.(1)传统的混凝土搅拌站难以从拌料前、拌料中、拌料后的三个阶段对混凝土生产进行实时监控,降低了混凝土搅拌混合过程中各项配比数据传输与处理的效率。
4.(1)传统的混凝土搅拌站难以将砂石骨料与含水量传感器之间进行隔离,易产生砂石骨料的堆积造成对含水量传感器的封闭堵塞现象,难以对各层次的骨料砂石含水量同时进行检测,降低了检测数据的准确性,更难以根据含水量数据对所需增减水分的砂石骨料区域进行精确的含水量调整作业;(2)传统的混凝土搅拌站难以对搅拌混合后的混凝土进行自动的取样作业,增加了人工的作业强度,也难以在取样结束后对粘附在取样装置上的混凝土进行自动的刮除清理,增加了后续清理维护作业的作业效率。
技术实现要素:
5.针对现有技术中的问题,本发明提供了一种智能水泥混凝土搅拌站品质实时监控系统。
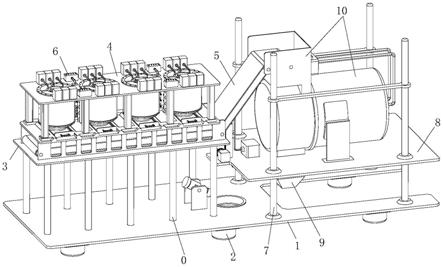
6.本发明解决其技术问题所采用的技术方案是:一种智能水泥混凝土搅拌站品质实时监控系统,包括承重杆、基板、支撑脚、承重板、堆料机构、输送带、监控系统、支撑杆、支撑板、卸料口和搅拌楼,所述的基板下端四周拐角处均安装有支撑脚,基板的上端面前侧均匀安装有承重杆,承重杆的上端共同安装有承重板,承重板的上端安装有堆料机构,基板的上端面后侧均匀安装有支撑杆,支撑杆的中部共同安装有支撑板,支撑板的上端安装有搅拌楼,且搅拌楼与堆料机构之间安装有输送带,支撑板上安装有卸料口,且卸料口与搅拌楼相连通,堆料机构与搅拌楼上均设置有监控系统。
7.所述的堆料机构包括堆料框、堆料筒、落料口、加湿水箱、加湿环、加湿杆、环形喷
口、检测杆、检测环、含水量传感器、控制盒和落料板,承重板的上端安装有堆料框,堆料框的中部均匀安装有堆料筒,堆料筒的上端以及下端均为开口结构,堆料框的下端均匀开设有落料口,且落料口位于堆料筒的正下方,堆料框的下端通过滑动配合的方式均匀安装有落料板,落料板位于落料口的上方且落料板的上端面通过滑动配合的方式抵靠在堆料口的下端出口处,堆料筒的内侧壁从上向下安装有多组检测杆,检测杆上通过转动配合的方式均匀安装有检测环,检测环内均设置有含水量传感器,堆料框的上端面均匀安装有控制盒,控制盒与堆料筒一一对应且控制盒通过导线分别与多组检测杆内的含水量传感器相导通,堆料筒的上端安装有加湿环,加湿环上沿其周向安装有多组加湿杆,多组加湿杆均匀分布在检测杆的两侧且加湿杆上均匀安装有环形喷口,堆料框的上端均匀安装有多组加湿水箱,每组加湿水箱均与每组加湿杆相连通,设置的检测环可对含水量传感器进行周向的防护,避免骨料砂石的冲撞造成含水量传感器的损伤,同时,检测环还可将砂石骨料与含水量传感器之间进行隔离,减少砂石骨料的堆积造成对含水量传感器的封闭堵塞,提升含水量数据检测的精确性。
8.具体的,所述的加湿杆上从上向下均匀安装有多个独立环形喷口,环形喷口均与加湿水箱相连通且每个环形喷口均由控制盒独立控制,通过周向及多层次设置的环形喷口可便于将水分均匀喷洒到需要调整含水量的砂石骨料周围,避免传统的从上向下直接浇灌式作业,提升对不同种类以及同种类中不同区域砂石骨料含水量调整的效率以及精确程度具体的,所述的输送带为现有混凝土输送带,输送带的首端位于落料口的下方,输送带的末端延伸至搅拌楼内。
9.具体的,所述的搅拌楼为现有混凝土搅拌楼,搅拌楼的入料口位置与输送带的末端相连接,搅拌楼的出料口位置与卸料口相连通,搅拌楼上安装有电流表,且电流表通过导线与搅拌楼的搅拌主机相导通,电流表用于实时检测搅拌主机的空载电流以及负载电流,通过对搅拌主机的空载电流以及负载电流进行检测比对,可对搅拌主机的运行状况进行实时的检测,提升搅拌主机运行的安全稳定程度。
10.具体的,所述的基板上端活动安装有取样盘,位于取样盘一侧的基板上安装有高清相机,且高清相机的摄像头与取样盘相对应。
11.具体的,所述的卸料口还包括滑槽架、取样滑架、取样气缸、取样转轴、取样筒、取样电机、密封盖和电磁铁,支撑板的下端面对称安装有滑槽架,滑槽架上通过滑动配合的方式安装有取样滑架,支撑板的下端面安装有取样气缸,且取样气缸的输出轴与取样滑架相连接,取样滑架的下端通过轴承对称安装有取样转轴,取样转轴之间共同安装有取样筒,取样筒的一侧侧壁设置有开口,取样滑架上通过电机座安装有取样电机,取样电机的输出轴通过联轴器与取样转轴的一端相连接,取样筒的一端端部通过铰接的方式安装有密封盖,密封盖与取样筒的端部均对应设置有电磁铁,通过取样电机与取样气缸的协同配合可实现对搅拌后混凝土的自动取样作业,减少人工的作业强度。
12.具体的,所述的支撑板上设置有导向筒,导向筒内通过滑动配合的方式安装有退料滑杆,退料滑杆的中部为空心结构,支撑板的上端安装有清洗水箱,清洗水箱通过清洗水管与退料滑杆的上端相连通,退料滑杆的一侧外壁从上至下均匀设置有啮合齿,支撑板的上端通过电机座安装有退料电机,退料电机的输出轴通过键连接的方式安装有退料齿轮,且退料齿轮与啮合齿啮合传动,取样筒的端部通过滑动配合的方式安装有退料架,退料架
的一端均匀设置有清洗喷口,退料架的中部为空心结构,且退料滑杆的下端设置有与退料架相配合的喷头,退料架的另一端通过退料弹簧与取样筒相连接,通过退料架的往复滑动可将粘附残留在取样筒内部的混凝土进行刮除,设置的退料弹簧可进一步提升退料滑杆与退料架之间连接的密封程度,均匀设置的清洗喷口可进一步将水喷洒到取样筒的内部各处,进一步提升对取样筒清理作业的作业效率以及清洁程度。
13.具体的,所述的卸料口一侧侧壁通过滑动配合的方式均匀安装有对接杆,对接杆的一端共同安装有对接盘,对接盘位于卸料口的内侧且对接盘通过对接弹簧与卸料口的内壁相连接,卸料口的另一侧外壁安装有对接环,对接环与对接盘为同轴心,取样筒的一端外壁对称安装有对接片,对接片通过滑动配合的方式抵靠在对接环上,通过卸料口侧壁的自身抵靠作用以及对接环与对接片之间的卡接作用可对取样筒避免取样筒在伸缩移动的过程中以及在进行混凝土取样的过程中发生较大的振动偏斜,提升混凝土取样作业的速度以及精度。
14.具体的,所述的卸料口一侧内壁沿其周向均匀安装有刮料齿,卸料口内安装有刮料棉,刮料棉位于刮料齿与对接环之间且刮料棉与对接环同轴心,通过周向设置的刮料齿可在取样筒取样完成并移出的过程中,对粘附在取样筒外壁上的混凝土骨料进行刮除,同时通过限位作用将堆积在取样筒内侧的混凝土上端面进行抹平,设置的刮料棉可进一步对取样筒的外侧壁进行二次的清理,避免细小混凝土骨料在卸料口内壁以及对接环内发生堆积,提升后续清理维护作业的作业效率。
15.具体的,所述的监控系统由控制盒、高清相机以及电流表共同组成,且监控系统将所监控数据传输至操作室控制系统电脑并独立显示。
16.本发明的有益效果:(1)本发明所述的一种智能水泥混凝土搅拌站品质实时监控系统,设置的检测环可对含水量传感器进行周向的防护,避免骨料砂石的冲撞造成含水量传感器的损伤,同时,检测环还可将砂石骨料与含水量传感器之间进行隔离,减少砂石骨料的堆积造成对含水量传感器的封闭堵塞,提升含水量数据检测的精确性;通过矩阵式均匀排布的含水量传感器可对堆料筒内各层次的骨料砂石含水量同时进行检测,提升检测数据的准确性,通过周向及多层次设置的环形喷口可便于将水分均匀喷洒到需要调整含水量的砂石骨料周围,避免传统的从上向下直接浇灌式作业,提升对不同种类以及同种类中不同区域砂石骨料含水量调整的效率以及精确程度。
17.(2)本发明所述的一种智能水泥混凝土搅拌站品质实时监控系统,通过对搅拌主机的空载电流以及负载电流进行检测比对,可对搅拌主机的运行状况进行实时的检测,提升搅拌主机运行的安全稳定程度。
18.(3)本发明所述的一种智能水泥混凝土搅拌站品质实时监控系统,通过取样电机与取样气缸的协同配合可实现对搅拌后混凝土的自动取样作业,减少人工的作业强度,通过卸料口侧壁的自身抵靠作用以及对接环与对接片之间的卡接作用可对取样筒避免取样筒在伸缩移动的过程中以及在进行混凝土取样的过程中发生较大的振动偏斜,提升混凝土取样作业的速度以及精度;通过周向设置的刮料齿可在取样筒取样完成并移出的过程中,对粘附在取样筒外壁上的混凝土骨料进行刮除,同时通过限位作用将堆积在取样筒内侧的混凝土上端面进行
抹平,设置的刮料棉可进一步对取样筒的外侧壁进行二次的清理,避免细小混凝土骨料在卸料口内壁以及对接环内发生堆积,提升后续清理维护作业的作业效率。
19.(4)本发明所述的一种智能水泥混凝土搅拌站品质实时监控系统,通过退料架的往复滑动可将粘附残留在取样筒内部的混凝土进行刮除,设置的退料弹簧可进一步提升退料滑杆与退料架之间连接的密封程度,均匀设置的清洗喷口可进一步将水喷洒到取样筒的内部各处,进一步提升对取样筒清理作业的作业效率以及清洁程度。
附图说明
20.下面结合附图和实施例对本发明进一步说明。
21.图1为本发明提供的一种智能水泥混凝土搅拌站品质实时监控系统的一种较佳实施例整体结构示意图;图2为本发明图1的俯视示意图;图3为本发明图2的a-a方向剖视示意图;图4为本发明图3的b处放大示意图;图5为本发明图3的c处放大示意图;图6为本发明图3的d处放大示意图;图7为本发明堆料机构的第一局部立体结构示意图;图8为本发明堆料机构的第二局部立体结构示意图;图9为本发明图8的e处放大示意图;图10为本发明搅拌楼及高清相机相对位置示意图;图11为本发明卸料口的局部立体结构示意图;图12为本发明取样筒的第一局部立体结构示意图;图13为本发明取样筒的第二局部立体结构示意图;图中:0、承重杆;1、基板;2、支撑脚;3、承重板;4、堆料机构;5、输送带;6、监控系统;7、支撑杆;8、支撑板;9、卸料口;10、搅拌楼;41、堆料框;42、堆料筒;43、落料口;44、加湿水箱;45、加湿环;46、加湿杆;47、环形喷口;48、检测杆;49、检测环;410、含水量传感器;411、控制盒;412、落料板;101、电流表;11、取样盘;12、高清相机;81、导向筒;82、退料滑杆;83、清洗水箱;84、清洗水管;85、啮合齿;86、退料电机;87、退料齿轮;88、退料架;881、清洗喷口;89、退料弹簧;91、滑槽架;92、取样滑架;93、取样气缸;94、取样转轴;95、取样筒;96、取样电机;97密封盖;98、电磁铁;910、对接杆;911、对接盘;912、对接弹簧;913、对接环;951、对接片;914、刮料齿;915、刮料棉。
具体实施方式
22.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
23.参阅图1、图2和图3,一种智能水泥混凝土搅拌站品质实时监控系统6,包括承重杆0、基板1、支撑脚2、承重板3、堆料机构4、输送带5、监控系统6、支撑杆7、支撑板8、卸料口9和搅拌楼10,所述的基板1下端四周拐角处均安装有支撑脚2,基板1的上端面前侧均匀安装有承重杆0,承重杆0的上端共同安装有承重板3,承重板3的上端安装有堆料机构4,基板1的上
端面后侧均匀安装有支撑杆7,支撑杆7的中部共同安装有支撑板8,支撑板8的上端安装有搅拌楼10,且搅拌楼10与堆料机构4之间安装有输送带5,支撑板8上安装有卸料口9,且卸料口9与搅拌楼10相连通,堆料机构4与搅拌楼10上均设置有监控系统6。
24.参阅图3、图4、图7、图8和图9,所述的堆料机构4包括堆料框41、堆料筒42、落料口43、加湿水箱44、加湿环45、加湿杆46、环形喷口47、检测杆48、检测环49、含水量传感器410、控制盒411和落料板412,承重板3的上端安装有堆料框41,堆料框41的中部均匀安装有堆料筒42,堆料筒42的上端以及下端均为开口结构,堆料框41的下端均匀开设有落料口43,且落料口43位于堆料筒42的正下方,所述的输送带5为现有混凝土输送带,输送带5的首端位于落料口43的下方,输送带5的末端延伸至搅拌楼10内,堆料框41的下端通过滑动配合的方式均匀安装有落料板412,落料板412位于落料口43的上方且落料板412的上端面通过滑动配合的方式抵靠在堆料口的下端出口处,堆料筒42的内侧壁从上向下安装有多组检测杆48,检测杆48上通过转动配合的方式均匀安装有检测环49,检测环49内均设置有含水量传感器410,堆料框41的上端面均匀安装有控制盒411,控制盒411与堆料筒42一一对应且控制盒411通过导线分别与多组检测杆48内的含水量传感器410相导通,堆料筒42的上端安装有加湿环45,加湿环45上沿其周向安装有多组加湿杆46,多组加湿杆46均匀分布在检测杆48的两侧且加湿杆46上均匀安装有环形喷口47,所述的加湿杆46上从上向下均匀安装有多个独立环形喷口47,环形喷口47均与加湿水箱44相连通且每个环形喷口47均由控制盒411独立控制,堆料框41的上端均匀安装有多组加湿水箱44,每组加湿水箱44均与每组加湿杆46相连通。
25.具体工作时,首先通过人工推动落料板412在堆料框41的底部进移动,使其上端面完全覆盖堆料筒42的下端出口,使堆料筒42的底部处于封闭状态,之后,将待混合搅拌的混凝土砂石骨料按种类分别装填到堆料筒42内,在骨料砂石装填的过程中,设置的检测环49可对含水量传感器410进行周向的防护,避免骨料砂石的冲撞造成含水量传感器410的损伤,同时,检测环49还可将砂石骨料与含水量传感器410之间进行隔离,减少砂石骨料的堆积造成对含水量传感器410的封闭堵塞,提升含水量数据检测的精确性;当骨料砂石装填完毕之后,通过含水量传感器410实时读取每一个堆料筒42内砂石骨料的含水量,并通过控制盒411与监控系统6将每一个堆料筒42内砂石骨料的含水量数据传输至操作室控制系统电脑显示界面,由于含水量传感器410为从上向下成矩阵式均匀排布在堆料筒42内侧的骨料砂石中,通过含水量传感器410的检测可对各层次的骨料砂石含水量同时进行检测,提升检测数据的准确性,之后,当堆料筒42内某一区域砂石骨料的含水量数据不符合规定数值时,预先通过控制盒411自动计算该区域大概的加减水重量,并报警提醒操作员进行实时监控,之后,进一步通过控制盒411控制处于该区域四周的环形喷口47进行工作,通过加湿杆46的输送将预先存储于加湿水箱44中的水喷洒到该区域的砂石骨料中,通过周向及多层次设置的环形喷口47可便于将水分均匀喷洒到需要调整含水量的砂石骨料周围,避免传统的从上向下直接浇灌式作业,提升对不同种类以及同种类中不同区域砂石骨料含水量调整的效率以及精确程度,并在含水量调整后,将砂石骨料的含水量数据随同每一盘配料数据存储于电脑数据库中。
26.参阅图3和图10,所述的搅拌楼10为现有混凝土搅拌楼,搅拌楼10的入料口位置与输送带5的末端相连接,搅拌楼10的出料口位置与卸料口9相连通,搅拌楼10上安装有电流
表101,且电流表101通过导线与搅拌楼10的搅拌主机相导通,电流表101用于实时检测搅拌主机的空载电流以及负载电流。
27.具体工作时,当多种砂石骨料的含水量数据均复合要求之后,启动输送带5以及搅拌楼10上的搅拌主机进行同步运转,并通过电流表101对搅拌主机的空载电流进行检测,并通过监控系统6将检测到的空载电流值实时传输至操作室控制系统电脑显示界面,之后,通过人工依次拉动落料板412进行移动,解除对堆料筒42下端的封闭作用,之后,经重力作用,堆积在堆料筒42内的砂石骨料穿过落料口43下落到输送带5上,并在输送带5的输送作用下进入到搅拌楼10内进行搅拌混合,当砂石骨料输送完毕之后,通过电流表101对搅拌主机此时的负载电流进行检测,并通过监控系统6将检测到的空载电流值实时传输至操作室控制系统电脑显示界面,在对每一盘混凝土配合时提前设置有负载电流与空载电流差值的合理范围,如 6a
±
1a,当生产过程中电流差值超出设定范围时,触发监控系统6报警以提醒操作员调整,当一个任务单一车混凝土生产结束,自动统计显示该任务单内所有盘数混凝土的平均电流差值并随同每盘配料数据储存于电脑数据库中。
28.参阅图3、图11和图12,所述的卸料口9还包括滑槽架91、取样滑架92、取样气缸93、取样转轴94、取样筒95、取样电机96、密封盖97和电磁铁98,支撑板8的下端面对称安装有滑槽架91,滑槽架91上通过滑动配合的方式安装有取样滑架92,支撑板8的下端面安装有取样气缸93,且取样气缸93的输出轴与取样滑架92相连接,取样滑架92的下端通过轴承对称安装有取样转轴94,取样转轴94之间共同安装有取样筒95,取样筒95的一侧侧壁设置有开口,取样滑架92上通过电机座安装有取样电机96,取样电机96的输出轴通过联轴器与取样转轴94的一端相连接,取样筒95的一端端部通过铰接的方式安装有密封盖97,密封盖97与取样筒95的端部均对应设置有电磁铁98。
29.参阅图10,所述的基板1上端活动安装有取样盘11,位于取样盘11一侧的基板1上安装有高清相机12,且高清相机12的摄像头与取样盘11相对应。
30.参阅图1、图2和图3,所述的监控系统6由控制盒411、高清相机12以及电流表101共同组成,且监控系统6将所监控数据传输至操作室控制系统电脑并独立显示。
31.具体工作时,当混凝土在搅拌楼10内搅拌完成之后,将搅拌楼10自身的混凝土出口位置打开,之后,混凝土进重力导向作用进一步穿过卸料口9下落到预先等待的搅拌车或装料斗中,在混凝土下落的过程中,启动取样电机96进行反向运转,通过取样电机96带动取样转轴94进行逆时针转动,通过取样转轴94带动取样筒95进行转动,使取样筒95从竖直状态切换为水平状态,在取样筒95转动的过程中,铰接安装的密封盖97在重力作用下同步进行转动并最终贴合到取样筒95的端部,之后,对电磁铁98进行通电处理,使密封盖97与取样筒95端部之间进行固定,并完成对取样筒95端部的封堵;之后,启动取样气缸93进行工作,通过取样气缸93拉动取样滑架92在滑槽架91上进行移动,进一步通过取样滑架92带动取样筒95向卸料口9方向进行移动,使取样筒95的上侧开口部位进入到卸料口9的内侧,之后,流经卸料口9的部分混凝土便下落进入到取样筒95的内侧,完成对混凝土的取样作业,当混凝土的取样体积符合要求之后,通过取样气缸93推动取样滑架92在滑槽架91上进行移动,进一步使取样筒95移出卸料口9,之后,控制取样电机96进行正向运转,使其通过取样转轴94带动取样筒95进行逆时针转动,使取样筒95再次切换为竖直状态,之后,解除电磁铁98的通电效果,在失去磁力吸附作用后,混凝土通过
自身的重力将密封盖97进行推开,并进一步下落到下方的取样盘11中,之后,由高清相机12对混凝土表面进行拍照、摄像,并通过监控系统6传输至操作室控制系统电脑界面,同时由现有的智能图像识别软件对图像分析表面气泡数量、平整度、经时变化等情况,进一步判断混凝土包裹性、坍落度等情况,当对取样混凝土检测拍照发现异常时触发控制系统报警以提醒进一步取样检查,也可以由经验丰富的操作员及试验人员人工分析图像、录像,图像数据随同每一盘配料数据存储于电脑数据库中。
32.参阅图5、图6和图11,所述的卸料口9一侧侧壁通过滑动配合的方式均匀安装有对接杆910,对接杆910的一端共同安装有对接盘911,对接盘911位于卸料口9的内侧且对接盘911通过对接弹簧912与卸料口9的内壁相连接,卸料口9的另一侧外壁安装有对接环913,对接环913与对接盘911为同轴心,取样筒95的一端外壁对称安装有对接片951,对接片951通过滑动配合的方式抵靠在对接环913上。
33.参阅图5和图11,所述的卸料口9一侧内壁沿其周向均匀安装有刮料齿914,卸料口9内安装有刮料棉915,刮料棉915位于刮料齿914与对接环913之间且刮料棉915与对接环913同轴心。
34.具体工作时,在取样筒95的端部在卸料口9内到达合适的位置时,其端部的密封盖97进一步抵靠到对接盘911的侧壁上,之后,在取样筒95的进一步移动过程中,对接盘911受到挤压作用并向卸料口9的侧壁内部进行收缩移动,同时,取样筒95的端部同步滑入到卸料口9的侧壁内部,通过卸料口9侧壁的自身抵靠作用完成对取样筒95一端端部的支撑作业,同时通过对接环913与对接片951之间的卡接作用完成对取样筒95另一端导向支撑,避免取样筒95在伸缩移动的过程中以及在进行混凝土取样的过程中发生较大的振动偏斜,提升混凝土取样作业的速度以及精度,通过周向设置的刮料齿914可在取样筒95取样完成并移出的过程中,对粘附在取样筒95外壁上的混凝土骨料进行刮除,同时通过限位作用将堆积在取样筒95内侧的混凝土上端面进行抹平,设置的刮料棉915可进一步对取样筒95的外侧壁进行二次的清理,避免细小混凝土骨料在卸料口9内壁以及对接环913内发生堆积,提升后续清理维护作业的作业效率;参阅图3、图10和图13,所述的支撑板8上设置有导向筒81,导向筒81内通过滑动配合的方式安装有退料滑杆82,退料滑杆82的中部为空心结构,支撑板8的上端安装有清洗水箱83,清洗水箱83通过清洗水管84与退料滑杆82的上端相连通,退料滑杆82的一侧外壁从上至下均匀设置有啮合齿85,支撑板8的上端通过电机座安装有退料电机86,退料电机86的输出轴通过键连接的方式安装有退料齿轮87,且退料齿轮87与啮合齿85啮合传动,取样筒95的端部通过滑动配合的方式安装有退料架88,退料架88的一端均匀设置有清洗喷口881,退料架88的中部为空心结构,且退料滑杆82的下端设置有与退料架88相配合的喷头,退料架88的另一端通过退料弹簧89与取样筒95相连接。
35.具体工作时,当完成对混凝土的取样拍照作业之后,通过人工将取样盘11进行取出并连通内部混凝土一并封存,便于后期的查验,之后,进一步启动退料电机86进行运转,通过退料电机86带动退料齿轮87进行转动,通过退料齿轮87与啮合齿85之间的啮合传动带动退料滑杆82在导向筒81内向下进行滑动,在退料滑杆82下滑移动到合适的位置之后,其下端端部进一步插接到退料架88的内部空腔内,设置的退料弹簧89可进一步提升退料滑杆82与退料架88之间连接的密封程度,之后,在退料滑杆82的进一步移动过程中,退料架88受
挤压作用开始在取样筒95内进行滑动,且在退料滑杆82下滑移动到合适的距离时,其上端端部高度低于清洗水箱83内水的液面高度,之后,水进重力作用以及清洗水管84的导向作用进一步进入到退料滑杆82内部,并在退料滑杆82的导向作用下经清洗喷口881喷洒到取样筒95的内壁上,如此重复多次,完成对取样筒95内部的清理作业。
36.工作时:第一步:首先通过人工推动落料板412在堆料框41的底部进移动,使其上端面完全覆盖堆料筒42的下端出口,使堆料筒42的底部处于封闭状态,之后,将待混合搅拌的混凝土砂石骨料按种类分别装填到堆料筒42内,当骨料砂石装填完毕之后,通过含水量传感器410实时读取每一个堆料筒42内砂石骨料的含水量,并通过控制盒411与监控系统6将每一个堆料筒42内砂石骨料的含水量数据传输至操作室控制系统电脑显示界面,之后,当堆料筒42内某一区域砂石骨料的含水量数据不符合规定数值时,预先通过控制盒411自动计算该区域大概的加减水重量,并报警提醒操作员进行实时监控,之后,进一步通过控制盒411控制处于该区域四周的环形喷口47进行工作,通过加湿杆46的输送将预先存储于加湿水箱44中的水喷洒到该区域的砂石骨料中,并在含水量调整后,将砂石骨料的含水量数据随同每一盘配料数据存储于电脑数据库中;第二步:当多种砂石骨料的含水量数据均复合要求之后,启动输送带5以及搅拌楼10上的搅拌主机进行同步运转,并通过电流表101对搅拌主机的空载电流进行检测,并通过监控系统6将检测到的空载电流值实时传输至操作室控制系统电脑显示界面,之后,通过人工依次拉动落料板412进行移动,解除对堆料筒42下端的封闭作用,之后,经重力作用,堆积在堆料筒42内的砂石骨料穿过落料口43下落到输送带5上,并在输送带5的输送作用下进入到搅拌楼10内进行搅拌混合,当砂石骨料输送完毕之后,通过电流表101对搅拌主机此时的负载电流进行检测,并通过监控系统6将检测到的空载电流值实时传输至操作室控制系统电脑显示界面,在对每一盘混凝土配合时提前设置有负载电流与空载电流差值的合理范围,如 6a
±
1a,当生产过程中电流差值超出设定范围时,触发监控系统6报警以提醒操作员调整,当一个任务单一车混凝土生产结束,自动统计显示该任务单内所有盘数混凝土的平均电流差值并随同每盘配料数据储存于电脑数据库中;第三步:当混凝土在搅拌楼10内搅拌完成之后,将搅拌楼10自身的混凝土出口位置打开,之后,混凝土进重力导向作用进一步穿过卸料口9下落到预先等待的搅拌车或装料斗中,在混凝土下落的过程中,启动取样电机96进行反向运转,通过取样电机96带动取样转轴94进行逆时针转动,通过取样转轴94带动取样筒95进行转动,使取样筒95从竖直状态切换为水平状态,在取样筒95转动的过程中,铰接安装的密封盖97在重力作用下同步进行转动并最终贴合到取样筒95的端部,之后,对电磁铁98进行通电处理,使密封盖97与取样筒95端部之间进行固定,并完成对取样筒95端部的封堵;第四步:启动取样气缸93进行工作,通过取样气缸93拉动取样滑架92在滑槽架91上进行移动,进一步通过取样滑架92带动取样筒95向卸料口9方向进行移动,使取样筒95的上侧开口部位进入到卸料口9的内侧,在取样筒95的端部在卸料口9内到达合适的位置时,其端部的密封盖97进一步抵靠到对接盘911的侧壁上,之后,在取样筒95的进一步移动过程中,对接盘911受到挤压作用并向卸料口9的侧壁内部进行收缩移动,同时,取样筒95的端部同步滑入到卸料口9的侧壁内部,通过卸料口9侧壁的自身抵靠作用完成对取样筒95一端端
部的支撑作业,同时通过对接环913与对接片951之间的卡接作用完成对取样筒95另一端导向支撑,避免取样筒95在伸缩移动的过程中以及在进行混凝土取样的过程中发生较大的振动偏斜;之后,流经卸料口9的部分混凝土便下落进入到取样筒95的内侧,完成对混凝土的取样作业;第五步:当混凝土的取样体积符合要求之后,通过取样气缸93推动取样滑架92在滑槽架91上进行移动,进一步使取样筒95移出卸料口9,之后,控制取样电机96进行正向运转,使其通过取样转轴94带动取样筒95进行逆时针转动,使取样筒95再次切换为竖直状态,之后,解除电磁铁98的通电效果,在失去磁力吸附作用后,混凝土通过自身的重力将密封盖97进行推开,并进一步下落到下方的取样盘11中,之后,由高清相机12对混凝土表面进行拍照、摄像,并通过监控系统6传输至操作室控制系统电脑界面,同时由现有的智能图像识别软件对图像分析表面气泡数量、平整度、经时变化等情况,进一步判断混凝土包裹性、坍落度等情况,当对取样混凝土检测拍照发现异常时触发控制系统报警以提醒进一步取样检查,也可以由经验丰富的操作员及试验人员人工分析图像、录像,图像数据随同每一盘配料数据存储于电脑数据库中;第六步:当完成对混凝土的取样拍照作业之后,通过人工将取样盘11进行取出并连通内部混凝土一并封存,便于后期的查验,之后,进一步启动退料电机86进行运转,通过退料电机86带动退料齿轮87进行转动,通过退料齿轮87与啮合齿85之间的啮合传动带动退料滑杆82在导向筒81内向下进行滑动,在退料滑杆82下滑移动到合适的位置之后,其下端端部进一步插接到退料架88的内部空腔内,设置的退料弹簧89可进一步提升退料滑杆82与退料架88之间连接的密封程度,之后,在退料滑杆82的进一步移动过程中,退料架88受挤压作用开始在取样筒95内进行滑动,且在退料滑杆82下滑移动到合适的距离时,其上端端部高度低于清洗水箱83内水的液面高度,之后,水进重力作用以及清洗水管84的导向作用进一步进入到退料滑杆82内部,并在退料滑杆82的导向作用下经清洗喷口881喷洒到取样筒95的内壁上,如此重复多次,完成对取样筒95内部的清理作业。
37.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1