一种整平装置的制作方法
1.本实用新型涉及墙建筑自动化设备技术领域,尤其涉及一种整平装置。
背景技术:
2.随着社会高速发展,我国在建筑领域取得较大成就。但在建筑施工时仍需要大量工人,自动化程度低导致施工效率低,尤其随着时间推移人口逐渐老龄化,用工难、用工荒等问题日益明显,所以提高建筑施工的自动化程度显得十分重要。
3.目前,混凝土地面施工流程通常是在混凝土浇筑过程中及初凝后对地面平整度及水平度进行调整,最后达到地面平整的工艺要求。该种施工方式大多由人工手动完成。另外市场上也出现整平机器人,该种机器人大都采用履带或轮子用于支撑机器人在混凝土上行走,后面牵引整平尺对地面进行施工,但该设备在施工时,由于混凝土高低不一,在整平尺的前进方向可能造成混凝土堆积,堆积过多的话导致机器人所需牵引力过大,能耗增大,无法正常完成施工,增加后续施工工序的人工成本和施工时间。
技术实现要素:
4.本实用新型的目的是提供一种整平装置,包括设于滚筒机架的整平电机、一端与所述整平电机连接的转轴、与转轴另一端连接的设有刮板和推料板的滚筒,所述刮板与推料板相对运动,还包括分别固定于滚筒两端的转盘和固定于滚筒机架的凸轮槽,所述转盘通过轴承与凸轮槽连接,所述转盘、凸轮槽、滚筒同轴心设置、且穿过转轴连接,所述凸轮槽内设有至少一个可沿凸轮槽滚动的滚轮,每一所述滚轮连接至一推料轴一端,所述推料轴另一端穿过所述转盘通孔连接至滚筒上的推料板,所述整平电机通过转轴带动滚筒圆周旋转,使刮板对地面实现刮平,且滚筒上的转盘实现同步圆周运动,从而使刮板上的推料板在凸轮槽的路径下相对于刮板产生上下运动,即可推掉刮平后的残留混凝土。
5.作为优选,所述刮板和推料板数量对应,分别优选为3个,且均布设置,所述推料板设于所述刮板上。
6.作为优选,所述转盘上均布有3个通孔,所述推料轴和滚轮均对应设有三个。
7.作为优选,所述凸轮槽的凸轮处朝向下端设置。
8.作为优选,所述整平电机通过传动装置带动所述转轴圆周旋转。
9.作为优选,所述滚筒支架上铰接有压辊,所述压辊通过拉簧与滚筒支架连接。
10.实现本实用新型目的的技术方案是:一种整平装置,
11.采用了上述技术方案,本实用新型具有以下的有益效果:(1)本实用新型结构巧妙,滚筒旋转式的拨料方式相对于传统的水平拨料在遇到混凝土堆料的时候,可以大大减少机器人所需的牵引力,同时增加被动式推料板,每次旋转都将刮板上的混凝土进行清理,防止滚筒旋转时将混凝土拨到后面,同时施工完成后,不用担心混凝土在刮板上有残留,提高免维护性。
12.(2)本实用新型的通过该结构使滚筒式的刮片旋转一圈接触到的混凝土有限,即
使堆料过多,整平机器人的牵引力不受影响,保证施工正常进行。
附图说明
13.为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
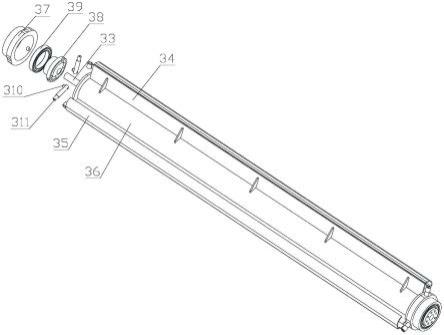
14.图1为本实用新型的部分结构爆炸示意图(未示出滚筒机架);
15.图2为本实用新型的结构示意图;
16.图3为本实用新型的侧视图;
17.图4为本实用新型的俯视图(未示出滚筒机架);
18.图5为图4的c-c剖视图(未示出滚筒机架);
19.图6为本实用新型中推料板完全缩回的的部分结构示意图(状态一);
20.图7为本实用新型中推料板完全缩回的的部分结构示意图(状态二);
21.图8为本实用新型中推料板完全伸出的的部分结构示意图(状态三);
22.图9为本实用新型中推料板完全伸出的的部分结构示意图(状态四);
具体实施方式
23.实施例一
24.见图1至图5,本实施例的整平装置,包括设于滚筒机架31的整平电机32、一端与所述整平电机连接的转轴33、与转轴另一端连接的设有刮板34和推料板35的滚筒36,所述整平电机通过传动装置312带动所述转轴圆周旋转,所述刮板与推料板相对运动,还包括分别固定于滚筒两端的转盘37和固定于滚筒机架的凸轮槽38,所述转盘通过轴承39与凸轮槽连接,所述转盘、凸轮槽、滚筒同轴心设置、且穿过转轴连接,所述凸轮槽内设有至少一个可沿凸轮槽滚动的滚轮310,每一所述滚轮连接至一推料轴311一端,所述推料轴另一端穿过所述转盘通孔连接至滚筒上的推料板,所述整平电机通过转轴带动滚筒圆周旋转,使刮板对地面实现刮平,且滚筒上的转盘实现同步圆周运动,从而使刮板上的推料板在凸轮槽的路径下相对于刮板产生上下运动,即可推掉刮平后的残留混凝土。本申请主要解决混凝土整平机器人在施工时混凝土布料不均导致整平尺堆料过多导致机器无法正常行进施工的问题。其特点在于该装置由传统水平刮板整平方式变为滚筒式的刮料整平方式,其优点在于滚筒式的刮片旋转一圈接触到的混凝土有限,即使堆料过多,整平机器人的牵引力不受影响,保证施工正常进行。
25.所述刮板和推料板数量对应,分别优选为3个,且均布设置,所述推料板设于所述刮板上。所述转盘上均布有3个通孔,所述推料轴和滚轮均对应设有三个。所述凸轮槽的凸轮处朝向下端设置。
26.所述滚筒支架上铰接有压辊313,所述压辊通过拉簧314与滚筒支架连接。滚筒支架后端与压辊铰接,同时设置拉簧使压辊对混凝土地面持续保持压力,从而将滚筒整平的地面进行抹平。
27.具体实施时,整平装置设有一个滚筒,滚筒圆周上均匀分布若干条(优选3条)刮板,刮板可将多余的混凝土带起,滚筒两端分别各固定有一个转盘,为了防止滚筒在旋转时将混凝土甩到凹槽内造成混凝土堆积,在每条刮板上设有一条推料板,于是需要刮板与推
料板产生相对运动,同时还需要滚筒在旋转时处于最下方的刮板能正常刮料,于是可以通过设计凸轮槽的方式实现。在操作过程中设计一凸轮槽,槽内安装有若干个滚轮(优选3个),滚轮可以根据凸轮槽设计的路径滚动,滚轮与推料板通过推料轴进行连接,凸轮槽通过轴承与转盘连接,使滚筒和凸轮槽可以保持相对运动,于是就可以实现滚筒在旋转时带动推料板一起旋转,推料板在凸轮槽的设计路径下,相对于刮板产生上下的相对运动,就可以在刮板上残余的混凝土推掉。滚筒支架两端分别与凸轮槽固定,滚筒支架一端设计有整平电机安装位置,通过皮带传动实现整平电机驱动滚筒旋转。
28.在混凝土刮平实施过程中,推料板会处于不同的状态,如图6-9所示,状态一到状态二过程中,推料板保持完全缩回状态,这个过程刮板刮地面上凸起的混凝土;状态二到状态三过程中,推料板伸出,这个过程推板把挂板上残留的混凝土推掉;状态三到状态四中,推料板保持完全伸出状态;状态四到状态一中,推料板缩回,露出刮板,做好刮板刮混凝土地面的准备。
29.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种整平装置,其特征在于:包括设于滚筒机架(31)的整平电机(32)、一端与所述整平电机连接的转轴(33)、与转轴另一端连接的设有刮板(34)和推料板(35)的滚筒(36),所述刮板与推料板相对运动,还包括分别固定于滚筒两端的转盘(37)和固定于滚筒机架的凸轮槽(38),所述转盘通过轴承(39)与凸轮槽连接,所述转盘、凸轮槽、滚筒同轴心设置、且穿过转轴连接,所述凸轮槽内设有至少一个可沿凸轮槽滚动的滚轮(310),每一所述滚轮连接至一推料轴(311)一端,所述推料轴另一端穿过转盘通孔连接至滚筒上的推料板。2.根据权利要求1所述的整平装置,其特征在于:所述刮板和推料板数量对应,分别为3个,且均布设置,所述推料板设于所述刮板上。3.根据权利要求1所述的整平装置,其特征在于:所述转盘上均布有3个通孔,所述推料轴和滚轮均对应设有三个。4.根据权利要求1所述的整平装置,其特征在于:所述凸轮槽的凸轮处朝向下端设置。5.根据权利要求1所述的整平装置,其特征在于:所述整平电机通过传动装置(312)带动所述转轴圆周旋转。6.根据权利要求1所述的整平装置,其特征在于:所述滚筒机架上铰接有压辊(313),所述压辊通过拉簧(314)与滚筒支架连接。
技术总结
本实用新型公开了一种整平装置,包括设于滚筒机架的整平电机、转轴、与转轴连接的设有刮板和推料板的滚筒,所述刮板与推料板相对运动,还包括分别固定于滚筒两端的转盘和凸轮槽,所述凸轮槽内设有至少一个可沿凸轮槽滚动的滚轮,每一所述滚轮连接至一推料轴一端,所述推料轴另一端穿过所述转盘通孔连接至滚筒上的推料板,所述整平电机通过转轴带动滚筒圆周旋转,使刮板对地面实现刮平,且滚筒上的转盘实现同步圆周运动,从而使刮板上的推料板在凸轮槽的路径下相对于刮板产生上下运动,即可推掉刮平后的残留在刮板上的混凝土。本实用新型不仅可大大减少机器人所需的牵引力,且每次旋转都将刮板上的混凝土进行清理,提高免维护性。性。性。
技术研发人员:刘紫敬 王锋利
受保护的技术使用者:湖南固工机器人有限公司
技术研发日:2022.01.26
技术公布日:2022/9/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1