一种苹果削皮机的旋转盘送果叉取装置的制作方法
1.本实用新型属于苹果削皮深加工领域,具体涉及一种苹果削皮机的旋转盘送果叉取装置。
背景技术:
2.受外部环境制约,苹果市场,近年来出现旺季市场饱和、滞销现象,影响果农进一步发家致富。市场调研发现,苹果深加工产品,如苹果干果片,苹果干果圈,很受消费市场追捧。苹果干果圈,具有口感好、价格高、耐储存等优点,高附加值的苹果深加工,能带动农民进一步发家致富。现场调研,果核是苹果的中心线,围绕苹果核的果肉是均匀的。苹果手工削皮去核过程:把苹果正立插入能旋转的叉子上,叉子正好叉入苹果的中心线,叉子轴线与苹果核重合;叉子与电机轴连接,打开电机让苹果旋转起来,用削皮刀绕苹果一侧转180度半圆,削掉苹果的外皮,拔下苹果,再下一个。如果叉子没能正好叉入苹果的中心线,旋转的苹果可能乱抖动,削皮刀无法下手削皮,需要拔下再次插好,采能准确削皮;削皮过程中,由于人工熟练程度不同,导致所削苹果皮厚薄不一致,难以控制质量。深入调研发现,现有的苹果深加工手段,还停留在原始的手工削皮阶段。手工削皮,存在速度慢、合格率低、皮厚浪费大、劳动强度大,存在误伤手指的危险性。自动化苹果削皮装置,就是让机器模仿手工削皮的动作,让旋转的刀叉准确插入苹果的中心线,苹果均匀转动,削皮才顺利。因此,苹果削皮,叉手插取苹果是关键一步。整个削皮过程,分为扎果、削皮、修顶、取核、拔果,五过程,本实用新型仅完成削皮前“扎果”旋转送出过程,简称一种苹果削皮机的旋转盘送果叉取装置。
3.一种苹果削皮机的旋转盘送果叉取装置的设计思路是:1中间旋转盘,由人工放入苹果,旋转送果;在旋转盘盘沿,按照120度间距设置两个苹果托盘,由人工在苹果托盘上放置苹果,送托盘旋转120度,到扎果位置,等待扎果;2扎果位置的两个苹果托盘上方,设置旋转方轴,旋转方轴的四面设置前后两个旋转臂果叉;扎果位置苹果托盘正上方设置旋转苹果果叉,果叉转到苹果托盘(托盘)的上方,准备叉取送托盘中的苹果;3盘下两个托举,送托盘托盘下,两个托举气缸活塞托举,把托盘中苹果顶进上方旋转臂的苹果叉手后,气缸活塞,送果托盘复位,扎果完成;4重复以上,上方旋转臂果叉旋转,把苹果送走;送托盘再次转动120度,又来两个苹果,等待再次托举扎果过程。具体,旋转盘安装在两层机架的半层平台上,旋转臂果叉安装在两层机架的一层的檩上;装置的所有部件,均接收mcu最小系统指令该装置的指令,相互配合协同有序运动。苹果叉取装置的电路组件,包括mcu最小系统、旋转盘驱动电机、旋转盘定位传感器、旋转臂定位传感器、旋转臂电机、电磁气阀两个,托举气缸两个。mcu最小系统,控制旋转盘驱动电机,按照120度旋转、停止等待托举;运动;mcu最小系统控制旋转臂电机,按照90度旋转、停止等待扎果,运动;mcu最小系统控制电磁气阀接通,托举气缸上举,完成扎果。
技术实现要素:
4.针对手工削皮存在的速度慢、合格率低、皮厚浪费、劳动强度大,还有削伤手指的危险。本实用新型的目的,就是让机器模仿手工削皮插取苹果的动作,让旋转臂刀叉准确插入苹果的中心线,完成“扎果”动作,十字形旋转臂再转动送走苹果,等待下一次插取。
5.本实用新型的技术方案:一种苹果削皮机的旋转盘送果叉取装置,其特征是,该双路叉取装置,包括两层机架、旋转盘双托盘送果系统和十字形旋转扎果系统,旋转盘双托盘送果系统安装在两层机架下层的右侧,十字形旋转扎果系统安装在两层机架上层的右侧;如图1所示,所述两层机架,是用方钢管焊接的上下两层长方形框架体,包括左右地檩、中檩、上檩、四角角立柱、前后地梁、中梁、上梁,上层框架高度是h2;机架下层框架的高度是h1,机架下层左右檩中间加檩中立柱,机架下层分成左右两间;在机架下层右间右侧的前后地檩上,焊接高度h1/2的立柱,简称半层立柱;在前后半层立柱与角立柱之间加装半檩,在前、后半檩上,安装一块钢板,是两层机架的半层平台;在半层平台上,安装旋转盘双托盘送果系统;所述旋转盘双托盘送果系统包括旋转盘驱动电机、气缸、气缸固定支架、c形气缸托举手、托盘连杆帽、托盘连杆、弹簧、直线轴承、托盘、托盘扎针、旋转盘和旋转盘定位总成;根据旋转盘驱动电机的转轴和固定螺栓位置,在半层平台中心打电机的轴通孔和安装通孔,在半层平台下面竖立安装旋转盘驱动电机,旋转盘驱动电机的续轴穿过半层平台的轴通孔;在旋转盘驱动电机的续轴的顶端,安装圆形旋转盘;圆形旋转盘,简称旋转盘;旋转盘在两层机架的下层旋转,旋转盘的1/3盘沿从两层机架的右侧面伸出;旋转盘上,按照圆心角120度间距,在旋转盘盘沿,焊接垂直于旋转盘盘面的竖立铁片,在铁片上粘结磁铁块,共三个磁铁块;在两层机架立柱上,对应旋转盘磁铁块位置,设置一个旋转盘定位传感器;三个磁铁块和一个旋转盘定位传感器,构成旋转盘定位总成;旋转盘上,按照圆心角120度,把圆形旋转盘分成三块劣弧;沿劣弧中心分界线两侧、间距105毫米,距旋转盘盘沿50毫米,打托盘连杆通孔;旋转盘上,每个劣弧段,有两个托盘连杆通孔,共有6个托盘连杆通孔;在托盘连杆通孔内,分别安装直线轴承;在直线轴承中,插入托盘连杆,托盘连杆与该直线轴承适配;托盘连杆上端,固定
ø
80托盘;托盘在旋转盘上,托盘盘口朝上,托盘盘心下面与托盘连杆固定,托盘盘心上面设置垂直扎针,扎针尖端朝上;从机架右侧伸出的旋转盘劣弧段,有两个托盘露出;旋转盘下,托盘连杆套装弹簧,托盘连杆下端安装托盘连杆帽;托盘连杆帽是圆形钢片,托盘连杆帽的直径大于弹簧的外径;弹簧的一端顶在旋转盘下面,另一端顶在托盘连杆帽上;旋转盘上托盘,靠弹簧弹力和自身重力落在旋转盘上,盘下托盘连杆在最低位置,这是托盘的常态;托盘连杆帽、托盘连杆、托盘和托盘扎针,是一联合体;旋转盘驱动电机驱动旋转盘,每次旋转120度,等待扎果;此时旋转到机架内旋转盘劣弧上两个托盘的正上方,是十字形旋转扎果系统的两个三刃果叉,两个托盘的正下方,是托举气缸;机架内旋转盘劣弧上两个托盘连杆上下对应的两层机架的半层平台上,设置托举气缸的托举通孔;在两个托盘连杆上下对应的半层平台下,安装托举气缸固定架,在托举气缸固定架下,安装倒立的托举气缸,托举气缸的活塞连杆穿过托举通孔向上运动;活塞连杆上端,安装c形托举手;c形托举手的内部空间与托盘连杆帽适配,c形托举的两侧手指,能够勾住托盘连杆帽;托举气缸的活塞连杆穿过半层平台上的托举通孔,通过c形托举手,托举托盘连杆帽、托盘连杆、托盘向上;旋转盘上,托盘向上过程,到顶后迅速下落复位;托举气缸是双向气缸,接通气路开关,双向气缸推动活塞连杆,推动托盘连杆帽、托盘连杆、托盘向上运动到最
高位后,双向气缸自动反向,拉动活塞连杆,c形托举手拉动托盘连杆帽、托盘连杆、托盘向下复位,托盘落到旋转盘上,关闭气路开关,等待下次托举。
6.所述十字形旋转扎果系统,包括三刃果叉、果叉旋转轴、被动摩擦转盘、果叉旋转轴轴承、旋转方轴、旋转方轴定位总成、旋转方轴轴承和旋转方轴驱动电机;在两层机架右侧的前后中檩上,上下对应托盘连杆的竖直方向投影位置,焊接旋转方轴轴承;在前后旋转方轴轴承之间,安装旋转方轴,旋转方轴的横断面呈正方形;在两层机架后中檩上、对应旋转方轴的位置,安装旋转方轴驱动电机;旋转方轴驱动电机,通过联轴器,机械连接旋转方轴,旋转方轴驱动电机驱动旋转方轴转动;在旋转方轴的另一端安装定位盘,在定位盘外侧对应旋转方轴四面中心位置,设置定位磁针,共四个定位磁针;定位磁针的针尖指向旋转方轴轴承方向,在旋转方轴轴承所在的后檩上,对应一个定位磁针位置,设置定位传感器,定位传感器与定位磁针磁力链接;定位传感器和定位磁针,组成旋转方轴定位总成;定位传感器电连接mcu系统,mcu系统控制旋转方轴驱动电机,旋转方轴每次转动90度;在旋转方轴的四个面上,上下对应两个托盘连杆的竖直方向投影位置,设置前后两个果叉旋转轴轴承;果叉旋转轴的一端嵌入果叉旋转轴轴承上,另一端圆柱设置成三刃,简称三刃果叉,三刃果叉在果叉旋转轴轴承中能够自由转动;在果叉旋转轴上,套接安装被动摩擦转盘,三刃果叉、被动摩擦盘、果叉旋转轴,是一个旋转整体,简称旋转果叉;转动转动被动摩擦盘,旋转果叉在果叉旋转轴轴承中旋转;从前后方向看,旋转方轴四面的旋转果叉,成十字形分布,简称十字形旋转果叉;旋转方轴四面的十字形旋转果叉与定位盘的定位磁针,前后重合;初始状态,旋转方轴的十字形旋转果叉,上下果叉竖直,左右果叉水平;旋转方轴每次转动90度,始终有两个旋转果叉向下,对准下方旋转盘上的两个托盘扎针;旋转果叉与下面旋转盘上的两个托盘扎针,以及旋转盘下的两个托举气缸,上下在一条竖线上。
7.本实用新型的工作原理说明;启动装置,mcu最小系统自检,电磁气阀关闭,检查旋转盘定位开关和旋转方轴定位开关;启动旋转盘双托盘送果系统、十字形旋转扎果系统。一种苹果削皮机的旋转盘送果叉取装置,在mcu最小系统、旋转盘定位总成的监督下,旋转盘120度转动,等待放果;旋转盘上两个苹果托盘从机架右侧伸出,由人工放置苹果,扎在托盘中心的扎针上,完成放果;在mcu最小系统、旋转盘定位总成的监督下,旋转盘继续转动120度,两个放置苹果的托盘到达机架内部的扎果位置,等待扎果;mcu最小系统启动电磁气阀,两个托举气缸同时启动,托举气缸的活塞连杆穿过托举通孔向上运动;托举气缸的活塞连杆穿过半层平台上的托举通孔,通过c形托举手,托举托盘连杆帽、托盘连杆、托盘向上;旋转盘上,托盘向上过程,推动托盘连杆帽、托盘连杆、托盘向上运动40毫米,托盘中苹果扎在上方的三刃果叉上;十字形旋转扎果系统的旋转方轴转动90度,送出苹果;旋转方轴后一面的三刃果叉向下,等待下一次扎果;双向气缸自动反向,拉动活塞连杆,c形托举手拉动托盘连杆帽、托盘连杆、托盘向下复位,托盘落到旋转盘上,关闭气路开关,等待下次托举;旋转盘继续转动,下一次扎果过程继续。
8.本实用新型的有益之处是,该旋转盘送果叉取装置,模仿手工削皮插取苹果的动作,让旋转臂刀叉准确插入苹果的中心线,完成插取苹果动作,再转动十字形旋转臂送走苹果,进入削皮阶段。该旋转盘送果叉取装置,具有速度快、低劳动强度、安全等优点。
附图说明
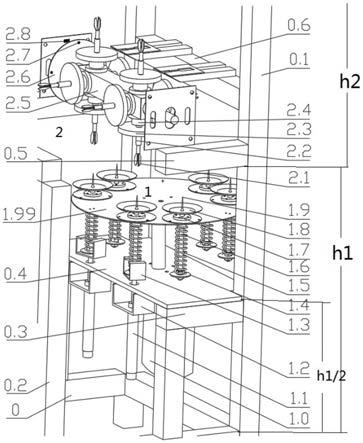
9.图1一种苹果削皮机的旋转盘送果叉取装置的整体结构示意图。
10.图2一种苹果削皮机的旋转盘送果叉取装置的旋转盘结构示意图
11.图3一种苹果削皮机的旋转盘送果叉取装置的十字形旋转扎果系统结构示意图
12.图中 0、两层机架,0.1、四角立柱,0.2、檩中立柱,0.3、前半檩,0.4、半层平台,0.5、前中檩,0.6、右中梁,1、旋转盘双托盘送果系统, 1.0、旋转盘驱动电机,1.1、托举气缸,1.2、托举气缸固定支架,1.3、c形托举手,1.4、托盘连杆帽,1.5、托盘连杆,1.6、弹簧,1.7、直线轴承,1.8、托盘,1.9、托盘扎针, 1.99、旋转盘,2、十字形旋转扎果系统,2.1、三刃果叉,2.2、果叉旋转轴,2.3、被动摩擦转盘,2.4、果叉旋转轴轴承 , 2.5、旋转方轴,2.6、旋转方轴定位盘,2.7、定位磁针,2.8、旋转方轴定位传感器。
具体实施方式
13.以htb
‑ꢀ
xp2018苹果自动削皮机为例,说明如下:一种苹果削皮机的旋转盘送果叉取装置的功能说明,mcu最小系统是该双路苹果叉取装置的大脑,电磁气阀、旋转盘驱动电机和旋转方轴驱动电机是执行部件,电磁气阀关闭,检查旋转盘定位开关和旋转方轴定位开关;启动旋转盘双托盘送果系统、十字形旋转扎果系统。一种苹果削皮机的旋转盘送果叉取装置,在mcu最小系统、旋转盘定位总成的监督下,旋转盘120度转动,等待放果;旋转盘上两个苹果托盘从机架右侧伸出,由人工放置苹果,扎在托盘中心的扎针上,完成放果;在mcu最小系统、旋转盘定位总成的监督下,旋转盘继续转动120度,两个放置苹果的托盘到达机架内部的扎果位置,等待扎果;mcu最小系统启动电磁气阀,两个托举气缸同时启动,托举气缸的活塞连杆穿过托举通孔向上运动;托举气缸的活塞连杆穿过半层平台上的托举通孔,通过c形托举手,托举托盘连杆帽、托盘连杆、托盘向上;旋转盘上,托盘向上过程,推动托盘连杆帽、托盘连杆、托盘向上运动40毫米,托盘中苹果扎在上方的三刃果叉上;十字形旋转扎果系统的旋转方轴转动90度,送出苹果;旋转方轴后一面的三刃果叉向下,等待下一次扎果;双向气缸自动反向,拉动活塞连杆向下,c形托举手拉动托盘连杆帽、托盘连杆、托盘向下复位,托盘落到旋转盘上,关闭气路开关,等待下次托举;旋转盘继续转动,下一次扎果过程继续。
14.本实用新型的有益之处是,该旋转盘送果叉取装置,模仿手工削皮插取苹果的动作,让旋转臂刀叉准确插入苹果的中心线,完成插取苹果动作,再转动十字形旋转臂送走苹果,进入削皮阶段。该旋转盘送果叉取装置,具有速度快、低劳动强度、安全等优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1