一种适用于服务机器人的快速接口结构的制作方法
[0001]
本发明涉及服务机器人技术领域,更具体地说,本发明涉及一种适用于服务机器人的快速接口结构。
背景技术:
[0002]
随着科技技术的进步,商用机器人的模块化需求日益增加,在目前以有方案中,各个机器人工作模块之间的电气连接形式大部分以电线直接连接为主,在机器人模块组装、更换时极为不便。
[0003]
本发明提出了一种新型服务机器人的快速接口结构,该接口代替了传统的电线连接方式,在机器人模块组装、更换时更为方便快捷。
技术实现要素:
[0004]
针对现有技术的不足,本发明提供了一种适用于服务机器人的快速接口结构。
[0005]
为实现上述目的,本发明提供如下技术方案:一种适用于服务机器人的快速接口结构,包括机器人底盘和机器人箱体,所述机器人底盘与机器人箱体配合连接,所述机器人底盘上设置有母头,所述机器人箱体上设置有与母头相对应的公头,所述母头安装在安装座上,所述安装座的内部安装有硬件电路板,所述硬件电路板上安装有电流检测模块、电压检测模块、温度检测模块和接入检测模块,所述公头上设置有6个弹性针脚;
[0006]
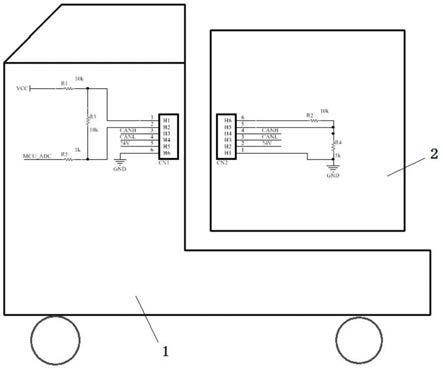
当机器人底盘和机器人箱体两个机器人模块未进行连接时,mcu_adc端采集的电压约等于vcc,此时处理器判定两模块未进行连接,机器人底盘不会给机器人箱体供电,当机器人底盘和机器人箱体正确连接时,r1,r3,r2,r4组成回路,r2、r3并联后与r1 r4串联,此时mcu_adc采集到点的电压1/4vcc,此时认为两个模块对接成功,机器人底盘给机器人箱体供电,开始正常工作。
[0007]
优选的,所述安装座的内部设置有安装板,所述安装板靠近母头的一侧安装有第一风扇。
[0008]
优选的,所述安装板远离母头的一侧底部安装有冷却箱,所述冷却箱中填充有冷却液,所述冷却箱中设置有微型循环泵,所述微型循环泵的出液端连接有第一管道,所述第一管道的另一端连接有冷却套,所述冷却套套接在母头的内侧外壁上,所述冷却套的顶部连接有第二管道,所述第二管道的另一端连接在冷却箱的顶部。
[0009]
优选的,所述第二管道的外壁上套接有散热翅片,所述散热翅片采用铜铝合金材质。
[0010]
优选的,所述安装板远离母头的一侧中部安装有第二风扇。
[0011]
优选的,所述第一风扇的出风端朝向冷却套设置。
[0012]
优选的,所述第二风扇的出风端朝向散热翅片设置。
[0013]
本发明的技术效果和优点:
[0014]
1、本发明通过快速接口结构的设计,代替了传统的电线连接方式,在机器人模块
组装、更换时更为方便快捷;同原有的系统架构相比,新的系统支持的功能更多。并且可扩展性大大增加。
[0015]
2、本发明当各个模块物理结构连接完成后,微处理器会判断各个模块之间物理结构是否对接成功,判断对接成功以后则开始供电、通讯,各个模块开始正常工作,同原有的系统架构相比,新的系统支持的功能更多;并且可扩展性大大增加。
附图说明
[0016]
图1为本发明的整体结构示意图。
[0017]
图2为本发明的一个角度下的立体图。
[0018]
图3为本发明的另一个角度下的立体图。
[0019]
图4为本发明中公头与母头的结构示意图。
[0020]
图5为中母头与安装座的结构示意图。
[0021]
图6为本发明中快速接口结构的原理框图。
[0022]
图中标号:1、机器人底盘;2、机器人箱体;3、硬件电路板;4、母头;5、安装座;6、公头;61、弹性针脚;7、安装板;8、冷却箱;9、微型循环泵;10、第一管道;11、冷却套;12、第一风扇;13、第二管道;14、第二风扇;15、散热翅片。
具体实施方式
[0023]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0024]
如图1-6所示,本发明一实施例的一种适用于服务机器人的快速接口结构,包括机器人底盘1和机器人箱体2,所述机器人底盘1与机器人箱体2配合连接,所述机器人底盘1上设置有母头4,所述机器人箱体2上设置有与母头4相对应的公头6,所述母头4安装在安装座5上,所述安装座5的内部安装有硬件电路板3,所述硬件电路板3上安装有电流检测模块、电压检测模块、温度检测模块和接入检测模块,所述公头6上设置有6个弹性针脚61;该快速接口共有6个弹性针脚,分别为电源正、电源负、两根引脚用于通讯(can、485等)、两个引脚用于检测是否对接成功;该快速接口的使用方法如图3,机器人底盘1和机器人箱体2模块分别安装了母头和公头,当底盘和箱子组装在一起时,弹簧顶针会插入对应的位置,通过自身的弹性保持连接。
[0025]
当机器人底盘1和机器人箱体2两个机器人模块未进行连接时,mcu_adc端采集的电压约等于vcc,此时处理器判定两模块未进行连接,机器人底盘1不会给机器人箱体2供电,当机器人底盘1和机器人箱体2正确连接时,r1,r3,r2,r4组成回路,r2、r3并联后与r1 r4串联,此时mcu_adc采集到点的电压1/4vcc,此时认为两个模块对接成功,机器人底盘1给机器人箱体2供电,开始正常工作。
[0026]
优选的,所述安装座3的内部设置有安装板7,所述安装板7靠近母头4的一侧安装有第一风扇12。
[0027]
在一个优选的实施方式中,所述安装板7远离母头4的一侧底部安装有冷却箱8,所
述冷却箱8中填充有冷却液,所述冷却箱8中设置有微型循环泵9,所述微型循环泵9的出液端连接有第一管道10,所述第一管道10的另一端连接有冷却套11,所述冷却套11套接在母头4的内侧外壁上,所述冷却套11的顶部连接有第二管道13,所述第二管道13的另一端连接在冷却箱8的顶部,微型循环泵9可以不断的对母头4进行散热,避免接口处热量过高,从而提高安全性能。
[0028]
在一个优选的实施方式中,所述第二管道13的外壁上套接有散热翅片15,所述散热翅片15采用铜铝合金材质。
[0029]
在一个优选的实施方式中,所述安装板7远离母头4的一侧中部安装有第二风扇14。
[0030]
在一个优选的实施方式中,所述第一风扇12的出风端朝向冷却套11设置,第一风扇12可以不断的对母头4进行风冷散热。
[0031]
在一个优选的实施方式中,所述第二风扇14的出风端朝向散热翅片15设置,第二风扇14可以对冷却液进行降温,方便冷却套11不断的对母头4进行水冷散热,因此,本发明的散热方式合理,多个散热机构的配合可以达到最好的散热效果,从而有效提高服务机器人的连接稳定性。
[0032]
本发明的工作原理:
[0033]
本发明通过快速接口结构的设计,代替了传统的电线连接方式,在机器人模块组装、更换时更为方便快捷;同原有的系统架构相比,新的系统支持的功能更多。并且可扩展性大大增加。
[0034]
值得说明的是,本发明机器人底盘不只可以放箱子,还可以放些其他的功能模块,每个模块都会有一个这样的接口,这样可以快速更换其他模块,就是体现由于这个接口的存在,更换其他模块更加快捷;
[0035]
位于机器人底盘1中的单片机会持续对mcu_adc端进行电压采集,根据图1,当机器人底盘1和机器人箱体模块两个机器人模块未进行连接时,mcu_adc端采集的电压约等于3.3v,此时处理器判定两模块未进行连接,机器人底盘1不会给机器人箱体模块供电,当机器人底盘1和机器人箱体模块正确连接时,r1,r3,r2,r4组成回路,r2、r3并联后与r1 r4串联,此时mcu_adc采集到点的电压0.8v-0.9v,此时认为两个模块对接成功,机器人底盘1给机器人箱体模块供电,开始正常工作,且机器人底盘1可以控制机器人箱体模块。
[0036]
最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1