一种六自由度服务型机器人手臂的制作方法
1.本实用新型涉及自动化机械装置领域,尤其涉及到一种六自由度服务型机器人手臂。
背景技术:
2.随着科学技术的发展,服务型机器人的运用越来越广泛。目前现有的服务机器人通常直接采用工业机器人的手臂,工业机器人的机械臂体积过于臃肿、质量过大、运动不灵活,并且不够美观,不能满足服务机器人机械臂轻型化的需求,我们有必要对这样一种结构进行改善,以克服上述缺陷,为此,本实用新型公开了一种六自由度服务型机器人手臂。
技术实现要素:
3.本实用新型的目的在于针对现有技术中的不足,提供一种六自由度服务型机器人手臂,以解决现有技术中存在的问题。
4.本实用新型的上述技术目的是用过以下技术方案实现的:
5.本实用新型的进一步设置为:一种六自由度服务型机器人手臂,包括底座,所述底座上设置有第一机械臂,所述第一机械臂的顶部设置有第一回转关节,所述第一回转关节上设置有第一回转壳体,所述第一回转壳体的通过第一弯转关节与弯转壳体连接,所述弯转壳体的另一端通过第二弯转关节与连接件连接,所述连接件上连接有第二回转关节,所述第二回转关节的顶部设置有第二回转壳体,所述第二回转壳体通过第三弯转关节与第二机械臂连接,所述第二机械臂的内部设置第三回转关节。
6.本实用新型的进一步设置为:所述第一回转关节、第二回转关节和第三回转关节结构相同均包括回转电机、回转电机法兰、回转减速器和回转减速器法兰,所述回转电机通过回转电机法兰固定在底座的内部,所述回转减速器设置在回转减速器法兰上,所述回转减速器法兰设置在回转电机法兰的外侧,回转减速器的输入端与回转电机的输出轴连接。
7.本实用新型的进一步设置为:所述第一弯转关节、第二弯转关节和第三回转关节的结构相同均包括弯转电机、弯转电机法兰、弯转减速器、弯转减速器法兰和法兰压板,所述弯转电机固定在弯转电机法兰上,所述弯转减速器法兰设置在弯转电机法兰的外侧,所述弯转减速器设置在弯转减速器法兰上,弯转减速器的输入端与弯转电机的输出轴连接,弯转减速器的输出端连接有法兰压板,所述法兰压板上设置有连接柱。
8.本实用新型的进一步设置为:所述第一回转壳体和第二回转壳体上均设置有置物腔。
9.本实用新型的进一步设置为:所述第一回转壳体上设置有固定内法兰,所述固定内法兰上设置有若干安装孔,所述安装孔与法兰压板上的安装柱相适应。所述回转壳体的两端均设置有置物腔。
10.本实用新型的进一步设置为:所述第一回转壳体上设置有固定内法兰,所述固定内法兰上设置有若干安装孔,所述安装孔与法兰压板上的安装柱相适应。
11.本实用新型的进一步设置为:所述第一机械臂的顶部设置有用于容纳第一回转关节的安装腔。
12.本实用新型的进一步设置为:所述第二机械臂的内部设置有用于容纳第三回转关节的腔体。
13.综上所述,本实用新型具有以下有益效果:
14.本实用新型所述的一种六自由度服务型机器人手臂的机械臂上设置有回转关节与弯转关节,具有六个自由度,关节活动较为灵活,所述回转关节与转弯关节采用模块化设计,机械臂加工和安装较为方便,机械臂的体积较小,质量较轻,外观较为美观。
附图说明
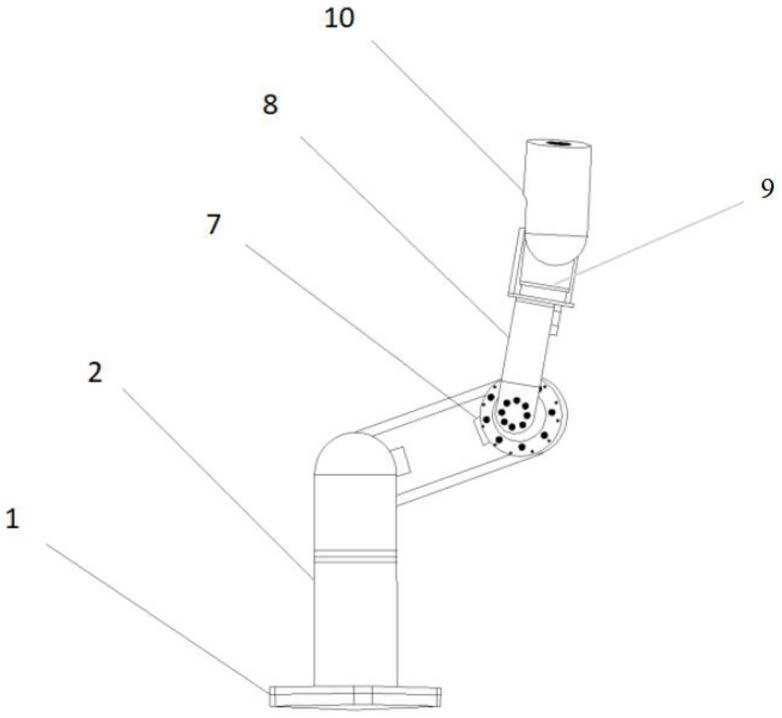
15.图1是本实用新型所述的机械臂的示意图。
16.图2是本实用新型所述的机械臂的结构示意图。
17.图3是本实用新型所述的机械臂的关节构成示意图。
18.图4是本实用新型所述的回转关节的结构示意图。
19.图5是本实用新型所述的弯转关节的结构示意图。
20.图6是本实用新型所述的弯转壳体的结构示意图。
21.图7是本实用新型所述的弯转壳体的示意图。
具体实施方式
22.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图示与具体实施例,进一步阐述本实用新型。
23.如图1至7所示,本实用新型提出的一种六自由度服务型机器人手臂,包括底座1,其特征在于,所述底座1上设置有第一机械臂2,所述第一机械臂2的顶部设置有第一回转关节3,所述第一回转关节3上设置有第一回转壳体4,所述第一回转壳体4的通过第一弯转关节5与弯转壳体6连接,所述弯转壳体6的另一端通过第二弯转关节7与连接件8连接,所述连接件8上连接有第二回转关节71,所述第二回转关节71的顶部设置有第二回转壳体81,所述第二回转壳体81通过第三弯转关节9与第二机械臂10连接,所述第二机械臂10的内部设置第三回转关节。
24.所述第一回转关节3、第二回转关节71和第三回转关节结构相同均包括回转电机31、回转电机法兰32、回转减速器33和回转减速器法兰34,所述回转电机31通过回转电机法兰32固定在底座1的内部,所述回转减速器33设置在回转减速器法兰34上,所述回转减速器法兰34设置在回转电机法兰32的外侧,回转减速器33的输入端与回转电机31的输出轴连接。
25.所述第一弯转关节5、第二弯转关节7和第三弯转关节9的结构相同均包括弯转电机51、弯转电机法兰52、弯转减速器53、弯转减速器法兰54 和法兰压板55,所述弯转电机51固定在弯转电机法兰52上,所述弯转减速器法兰54设置在弯转电机法兰52的外侧,所述弯转减速器53设置在弯转减速器法兰54上,弯转减速器53的输入端与弯转电机51的输出轴连接,弯转减速器53的输出端连接有法兰压板55。
26.所述第一回转壳体4和第二回转壳体81上均设置有置物腔,所述第一回转壳体4上
的置物腔用于容纳第一弯转关节5,所述第二回转壳体81上的置物腔用于容纳第三弯转关节9。
27.所述弯转壳体6的两端均设置有置物腔,所述弯转壳体6的一端的置物腔用于容纳第二弯转关节9,弯转壳体6另一端的置物腔用于容纳第一弯转关节5,所述弯转壳体6靠近第一弯转关节5一端的置物腔中设置有安装孔,所述安装孔用于与固定与第一机械臂2连接。
28.所述第一回转壳体4上设置有固定内法兰41,所述固定内法兰41上设置有若干安装孔,所述安装孔与法兰压板55上的安装柱相适应,所述法兰压板55通过安装柱固定在固定内法兰41上。
29.所述第一机械臂2的顶部设置有用于容纳第一回转关节3的安装腔。
30.所述第二机械臂10的内部设置有用于容纳第三回转关节的腔体。
31.本实用新型的工作原理如下:
32.使用时,将第一机械臂2设置在底座1上,接着将第一回转关节3安装在第一机械臂2的顶部的安装腔体,在第一回转关节3上设置有第一回转壳体,第一回转壳体4通过第一弯转关节5与弯转壳体6连接,所述弯转壳体6的另一端通过第二弯转关节7与连接件8连接,所述连接件8上连接有第二回转关节71,所述第二回转关节71的顶部设置有第二回转壳体 81,所述第二回转壳体81通过第三弯转关节9与第二机械臂10连接,所述第二机械臂10的内部设置第三回转关节,本实用新型所述的机械臂具有六个自由度,关节活动较为灵活,所述回转关节与转弯关节采用模块化设计,机械臂加工和安装较为方便,机械臂的体积较小,质量较轻,外观较为美观。
33.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1