一种具有图像识别功能的筛选机械手的制作方法
1.本实用新型属于机械手技术领域,尤其涉及具有图像识别功能的筛选机械手技术领域。
背景技术:
2.图像识别,是指利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对像的技术。图像识别是人工智能的一个重要领域。主要的图像识别方法有基于神经网络的图像识别方法、基于小波矩的图像识别方法等。一般工业使用中,采用工业相机拍摄图片,然后再利用软件根据图片灰阶差做进一步识别处理,另外在地理学中指将遥感图像进行分类的技术。
3.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
4.但是目前市场上的机械手不仅结构复杂,而且功能单一,不能有效的对运输中的产品进行筛选,不能有效地筛选出残次产品,进而不能保证产品的质量,从而影响产品质量。
5.因此,亟需一种具有产品筛选功能的机械手。
技术实现要素:
6.本实用新型的目的在于:针对现有技术的不足,而提供具有图像识别功能的筛选机械手,以解决现有机械手不能有效地筛选出残次产品的问题。
7.为了实现上述目的,本实用新型采用以下技术方案:
8.一种具有图像识别功能的筛选机械手,包括机架、x轴移载杆、y轴双轨道、z轴升降杆、夹爪机构以及线阵相机,所述夹爪机构通过所述x轴移载杆、所述y轴双轨道以及所述z轴升降杆的带动沿三个相互垂直的方向移动,所述y轴双轨道沿水平方向设置在所述机架顶部的底面,所述x轴移载杆沿水平方向且与所述y轴双轨道相互垂直地设置在所述y轴双轨道上,所述x轴移载杆可沿所述y轴双轨道水平移动,所述z轴升降杆沿竖直方向垂直设置在所述x轴移载杆上,所述z轴升降杆的一端与所述x轴移载杆滑动连接,所述z轴升降杆可沿所述x轴移载杆水平移动,所述z轴升降杆的另一端与所述夹爪机构连接,所述夹爪机构可沿所述z轴升降杆竖直移动,所述夹爪机构包括夹爪部、设置所述夹爪部侧周面上的多个活动爪、以及设置在所述夹爪部底面的电子摄像头,多个所述活动爪之间形成供产品进入夹持空间,所述电子摄像头的拍摄扫描沿竖直方向且与所述夹持空间对应,所述线阵相机沿水平方向且与所述x轴移载杆相互平行地设置在所述机架顶部的正面,所述线阵相机的拍摄扫描沿竖直方向。
9.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述y轴双轨道包括沿水平方向设置且相互平行的第一子轨道以及第二子轨道,所述x轴移载杆的两
端分别与所述第一子轨道以及所述第二子轨道滑动连接,所述x轴移载杆与所述第一子轨道以及所述第二子轨道相互垂直。通过上述设置,双轨道的设置使所述x轴移载杆的水平移动更平稳和准确。
10.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述第一子轨道与所述第二子轨道之间的距离长度和所述x轴移载杆的长度相同。
11.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述线阵相机的长度和所述x轴移载杆的长度相同。通过上述设置,保证线阵相机能覆盖所述电子摄像机的拍摄扫描范围。
12.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述机架两侧分别设置有多个支撑脚架。通过上述设置,提高所述机架的稳定系数。
13.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述支撑脚架的数量为4~8个。根据实际情况,选择合适数量的所述支撑脚架。
14.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述活动爪的数量为4~8个。根据实际情况,选择合适数量的所述活动爪。
15.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述活动爪的数量为4个。根据实际情况,选择合适数量的所述活动爪。
16.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述线阵相机包括多个排列设置的子相机。根据实际情况,选择合适数量的所述子相机。
17.作为本实用新型所述的具有图像识别功能的筛选机械手的优选方案,所述子相机的数量为8~20个。根据实际情况,选择合适数量的所述子相机。
18.本实用新型至少具有以下有益效果:
19.1)本实用新型通过在夹爪机构上设置电子摄像头,使夹爪机构具有图像识别功能,从而使夹爪机构能有效地筛选出并夹持出残次产品,提高了生产效率;
20.2)本实用新型通过设置线阵摄像头,使本实用新型具有预扫描功能,从而提高本实用新型拍摄扫描的准确度,避免出现无法识别残次产品的情况,提高了产品质量。
附图说明
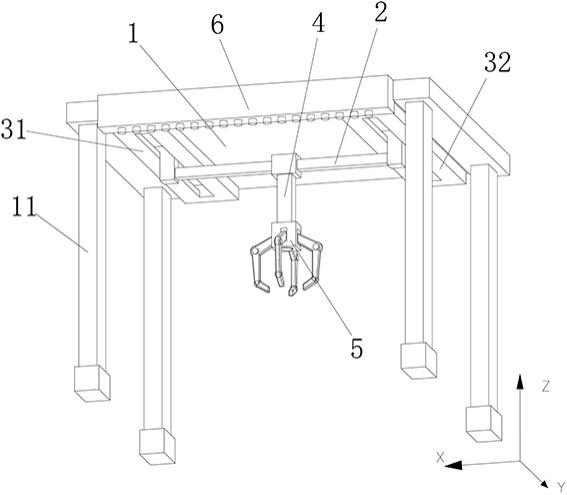
21.图1为本实用新型的结构示意图。
22.图2为本实用新型的正面图。
23.图3为本实用新型的仰视图。
24.图4为本实用新型中夹爪机构以及z轴升降杆的结构示意图。
25.图中:
[0026]1‑
机架;11
‑
支撑脚架;
[0027]2‑
x轴移载杆;
[0028]3‑
y轴双轨道;31
‑
第一子轨道;32
‑
第二子轨道;
[0029]4‑
z轴升降杆;
[0030]5‑
夹爪机构;51
‑
夹爪部;52
‑
活动爪;53
‑
电子摄像头;
[0031]6‑
线阵相机。
具体实施方式
[0032]
为使本实用新型的技术方案和优点更加清楚,下面将结合具体实施方式和说明书附图,对本实用新型及其有益效果作进一步详细的描述,但本实用新型的实施方式不限于此。
[0033]
如图1~4所示,一种具有图像识别功能的筛选机械手,包括机架1、x轴移载杆2、y轴双轨道3、z轴升降杆4、夹爪机构5、线阵相机6以及控制处理系统,夹爪机构5通过x轴移载杆2、y轴双轨道3以及z轴升降杆4的带动沿三个相互垂直的方向移动(即图中相互垂直的x轴方向、y轴方向以及z轴方向移动),y轴双轨道3沿y轴方向设置在机架1顶部的底面,x轴移载杆2沿x轴方向且与y轴双轨道3相互垂直地设置在y轴双轨道3上,x轴移载杆2可沿y轴双轨道3水平移动(即x轴移载杆2可沿y轴方向移动),z轴升降杆4沿z轴方向垂直设置在x轴移载杆2上,z轴升降杆4的一端与x轴移载杆2滑动连接,z轴升降杆4可沿x轴移载杆2水平移动(即z轴升降杆4可沿x轴方向移动),z轴升降杆4的另一端与夹爪机构5连接,夹爪机构5可沿z轴升降杆4竖直移动(即夹爪机构5可沿z轴方向移动),夹爪机构5包括夹爪部51、设置夹爪部51侧周面上的多个活动爪52、以及设置在夹爪部51底面的电子摄像头53,多个活动爪52之间形成供产品进入夹持空间,电子摄像头53的拍摄扫描沿z轴方向且与夹持空间对应,线阵相机6沿x轴方向且与x轴移载杆2相互平行地设置在机架1顶部的正面,线阵相机6的拍摄扫描沿z轴方向,控制处理系统分别与x轴移载杆2、y轴双轨道3、z轴升降杆4、夹爪机构5以及线阵相机6电连接。其中,线阵相机6为mv
‑
cl042
‑
70cc线阵相机,控制处理系统为单片机、arm9芯片或plc。
[0034]
本实施例的工作原理:
[0035]
1)待筛选产品沿y轴方向穿过机架1进行传输;
[0036]
2)当产品通过线阵相机6时,线阵相机6会对产品进行预扫描,初步对产品进行图像信息采集,并将预扫描的图像信息发送至控制处理系统进行图像识别;
[0037]
3)当产品通过电子摄像头53时,电子摄像头53会对产品进行拍摄扫描,进一步对产品进行图像信息采集,并将拍摄扫描的图像信息发送至控制处理系统进行图像识别,并将预扫描的识别结果和拍摄扫描的识别结果结合进行分析;
[0038]
4)若图像识别结果为残次产品,则通过多个活动爪52夹持起来放置到残次产品区域,完成产品的筛选。
[0039]
本实施例至少具有以下有益效果:
[0040]
1)本实施例通过在夹爪机构5上设置电子摄像头53,使夹爪机构5具有图像识别功能,从而使夹爪机构5能有效地筛选出并夹持出残次产品,提高了生产效率;
[0041]
2)本实施例通过设置线阵摄像头,使本实施例具有预扫描功能,从而提高本实施例拍摄扫描的准确度,避免出现无法识别残次产品的情况,提高了产品质量。
[0042]
优选地,y轴双轨道3包括沿y轴方向设置且相互平行的第一子轨道31以及第二子轨道32,x轴移载杆2的两端分别与第一子轨道31以及第二子轨道32滑动连接,x轴移载杆2与第一子轨道31以及第二子轨道32相互垂直。通过上述设置,双轨道的设置使x轴移载杆2的水平移动更平稳和准确。
[0043]
优选地,第一子轨道31与第二子轨道32之间的距离长度和x轴移载杆2的长度相同。
[0044]
优选地,线阵相机6的长度和x轴移载杆2的长度相同。通过上述设置,保证线阵相机6能覆盖电子摄像机的拍摄扫描范围。
[0045]
优选地,机架1两侧分别设置有多个支撑脚架11。通过上述设置,提高机架1的稳定系数。
[0046]
优选地,支撑脚架11的数量为4~8个。根据实际情况,选择合适数量的支撑脚架11。
[0047]
优选地,活动爪52的数量为4~8个。根据实际情况,选择合适数量的活动爪52。
[0048]
优选地,活动爪52的数量为4个。根据实际情况,选择合适数量的活动爪52。
[0049]
优选地,线阵相机6包括多个排列设置的子相机。根据实际情况,选择合适数量的子相机。
[0050]
优选地,子相机的数量为8~20个。根据实际情况,选择合适数量的子相机。
[0051]
根据上述说明书的揭示和教导,本实用新型所属领域的技术人员还能够对上述实施方式进行变更和修改。因此,本实用新型并不局限于上述的具体实施方式,凡是本领域技术人员在本实用新型的基础上所作出的任何显而易见的改进、替换或变型均属于本实用新型的保护范围。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1