一种燃油动力消防机器人的制作方法
1.本实用新型涉及消防设备技术领域,具体地说是一种燃油动力消防机器人。
背景技术:
2.随着科技进步以及实际的需求,特种机器人的应用领域越来越广泛,其中地面移动机器人已经广泛地应用在生活中的不同方面,比如消防、排爆、侦查、安防等领域。目前,燃油动力的消防机器人适用于,公(铁)路,隧道火灾;地铁车站与隧道火灾;地下设施与货场火灾;大跨度大空间火灾;石化油库与炼制厂火灾;危险火灾目标的进攻与掩护;人员不易接近的火灾扑救。
3.专利2018207884717,一种燃油动力的消防机器人,包括机器人车体、履带行走机构、雾炮机构、雾炮旋转机构、清障机构、摄像系统和照明系统,履带行走机构设置在机器人车体的下部用于带动机器人行走,雾炮机构通过雾炮旋转机构转动连接在机器人车体的顶部;清障机构设置在所述机器人车体的前部,机器人车体内部设有电控箱、电池以及柴油机组,电池为机器人供电,柴油机组用于驱动履带行走机构,摄像系统和照明系统与电控箱通过线路连接,且摄像系统采用360
°
全景成像,照明系统设置在机器人车体的前部。具备灭火、排烟、清障、拖拽、环境侦察、牵引等多种功能,缺点在于现有的灭火侦查机器人的喷淋装置通过液压缸直接安装在机器人车体的顶部,高度以及角度的调节范围受到液压缸形成的限制,不满足多种情况火灾的侦查工作。
4.为了减少设备资源,降低生产成本,能够满足多种情况火灾的侦查工作,因此本领域技术人员还应及时解决上述问题。
技术实现要素:
5.本实用新型的目的是克服现有技术的缺点,提供一种燃油动力消防机器人,以实现具备灭火、物资运输、拖拽、环境侦察、牵引等多种功能,具有速度快,流量大,灭火迅速,快速定位火源的特点,可对现场环境多种气体检测,且车体具有避障功能,有效保证了救援工作的进行及救援人员的生命安全。
6.本实用新型是通过以下技术方案来实现:一种燃油动力消防机器人,其特征在于,结构包括机器人车体,履带行走机构,水炮系统,摄像系统,照明系统,喷淋系统,报警系统,避障系统;履带行走机构安装在机器人车体两侧,水炮系统在机器人车体的前部,摄像系统包含四路摄像头,分别安装于机器人车体前后左右四个方位,照明系统设置在所述机器人车体的前部,照明系统包括设置在机器人车体的头部上方的行车照明灯,两侧的照明灯,水炮系统上的水泡照明灯,用于照明;喷淋系统设置在机器人车体两边和顶部,避障系统设置在机器人车体前端,报警系统包括警示灯,所述警示灯设置在机器人车体的上部;避障系统安装设置在机器人主体前端;水炮系统,摄像系统,照明系统,喷淋系统,报警系统,避障系统与机器人车体内安装设置的控制盒通过线路连接,且摄像系统采用360
°
全景成像。
7.作为优选,所述机器人车体内部设有控制盒、铅酸电瓶、柴油发动机,发动机冷却
系统,液压系统,液压冷却系统,所述控制盒是整个机器人的控制端,用于接收各个传感器采集的数据,并将数据发送至远程控制中心,通过接收控制中心的指令控制机器人的前进方向、前进速度以及操作模式;铅酸电瓶为机器人控制盒及外围设备进行供电,所述液压系统包括液压泵,液压马达及液压阀;发动机冷却系统设置在机器人车体的尾部,采用水冷结构给发动机及液压系统进行降温;履带行走机构设置在机器人车体的两侧,柴油发动机驱动液压系统与履带行走机构连接,进而驱动履带行走机构。
8.作为优选,所述水炮系统通过水管连接在机器人车体的前部,包括水炮系统包括底部设置水炮控制盒,水炮控制盒与炮身连接,炮身前端安装设置有炮头;炮身上安装设置有火源识别和水泡照明灯;
9.进一步所述,水炮系统通过水管与进水口连接,水炮系统与进水口之间的水管上设有两个电磁阀,用于控制水炮系统水源的通断以及水量的大小,电磁阀均与水炮控制盒线路连接,所述电池阀通过水管还与喷淋系统连接。
10.作为优选,喷淋系统包括主喷淋头和辅喷淋头,分别设置在机器人车体的两边,当机器人温度过高时,打开电磁阀通过主喷淋头和辅喷淋头给机器人进行降温。
11.所述水炮水炮控制盒,对水炮俯仰和旋转电机进行下发指令,实现水炮的俯仰和旋转动作,对炮头进行控制,实现水炮的开花和直流效果,满足不同的灭火场景需求。
12.作为优选,摄像头系统设置在所述机器人车体的前部和顶部,包含云台和广角摄像头。
13.作为优选,履带行走机构包括承重支架,安装在车体两边,前支撑轮,中间支撑轮与固定架、减震器分别通过铰链连接,固定架、减震器与承重支架分别通过轴进行旋转相连;前支撑轮,中间支撑轮位于整个机器人的底部,在行走中与地面基本贴紧,为避免机器人行驶过程中承重轮进入泥土,石子等杂物,避免驱动部件锈蚀,所述前支撑轮,中间支撑轮的两侧均设有防尘盖;前涨紧轮、中间涨紧轮与承重支架固定连接,可调节涨紧轮的位置可通过长螺钉沿所述承重支架前后调整,用于调节履带的张紧程度;驱动轮通过车体与液压马达旋转连接。
14.作为优选,避障系统包括气体探测器和超声波传感器,超声波传感器安装在水泡系统下边的广角摄像头一侧;气体探测器安装在主喷淋头一侧;超声波传感器和气体探测器分别与控制盒连接。
15.作为优选,所述机器人车体后端安装有急停开关,散热通风孔安装在机器人车体后端的中间位置,进水口上边设置有仪表盘。
16.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:本实用新型所述的技术方案具有结构简单、工作可靠、空间小、维护方便,可以避免履带与悬挂系统干涉磨损或脱带等故障的发生,同时本实用新型结构设计由于合理且简单,因此易于实现,适合推广应用。
附图说明
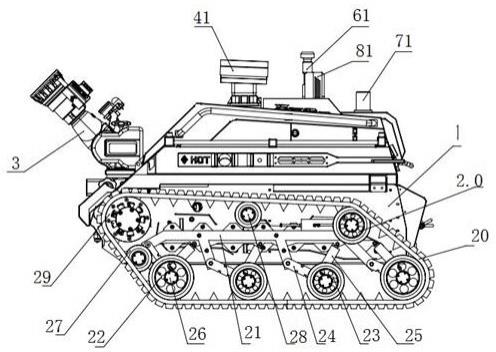
17.图1是本实用新型侧视结构示意图;
18.图2 是本实用新型前轴侧结构示意图;
19.图3是本实用新型后轴侧结构示意图;
20.图4是本实用新型水炮系统结构示意图。
21.附图标记:
[0022]1‑
机器人车体;11
‑
控制盒;12
‑
铅酸电瓶;13
‑
柴油发动机;14
‑
发动机冷却系统;15
‑
液压系统;16
‑
液压冷却系统;2
‑
履带行走机构;20
‑
履带;21
‑
承重支架;22
‑
前支撑轮;23
‑
中间支撑轮;24
‑
固定架;25
‑
减震器;26
‑
防尘盖;27
‑
前涨紧轮;28
‑
中间涨紧轮;29
‑
驱动轮;2.0
‑
可调节涨紧轮;3
‑
水炮系统;31
‑
水炮控制盒;32
‑
炮身;33
‑
炮头;34
‑
火源识别;35
‑
水泡照明灯;4
‑
摄像系统;41
‑
云台;42
‑
广角摄像头;5
‑
照明系统;51
‑
行车照明灯;52
‑
两侧的照明灯;6
‑
喷淋系统;61
‑
主喷淋头;62
‑
辅喷淋头;7
‑
报警系统;71
‑
警示灯;8
‑
避障系统;81
‑
气体探测器 82
‑
超声波传感器;9
‑
进水口;10
‑
急停开关;1
‑
3仪表盘;1
‑
1、运输平台;1
‑
2散热通风孔。
具体实施方式
[0023]
下面结合附图,对本实用新型作详细的说明。
[0024]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
[0025]
如图1
‑
4所示,所述一种燃油动力消防机器人,具体实施过程中,结构包括机器人车体1,履带行走机构2,水炮系统3,摄像系统4,照明系统5,喷淋系统6,报警系统7,避障系统8;履带行走机构2安装在机器人车体1两侧,水炮系统3在机器人车体1的前部,摄像系统4包含四路摄像头,分别安装于机器人车体1前后左右四个方位,照明系统5设置在所述机器人车体1的前部,照明系统5包括设置在机器人车体1的头部上方的行车照明灯51,两侧的照明灯52,水炮系统3上的水泡照明灯35,用于照明;喷淋系统6设置在机器人车体1两边和顶部,避障系统设置在机器人车体前端,报警系统7包括警示灯71,所述警示灯71设置在机器人车体1的上部;避障系统安装设置在机器人主体前端;水炮系统3,摄像系统4,照明系统5,喷淋系统6,报警系统7,避障系统8与机器人车体1内安装设置的控制盒11通过线路连接,且摄像系统采用360
°
全景成像。
[0026]
具体实施过程中,所述机器人车体1内部设有控制盒11、铅酸电瓶12、柴油发动机13,发动机冷却系统14,液压系统15,液压冷却系统16,所述控制盒11是整个机器人的控制端,用于接收各个传感器采集的数据,并将数据发送至远程控制中心,通过接收控制中心的指令控制机器人的前进方向、前进速度以及操作模式;铅酸电瓶12为机器人控制盒11及外围设备进行供电,所述液压系统15包括液压泵,液压马达及液压阀;发动机冷却系统14设置在机器人车体1的尾部,采用水冷结构给发动机及液压系统15进行降温;履带行走机构2设置在机器人车体1的两侧,柴油发动机13驱动液压系统15与履带行走机构2连接,进而驱动履带行走机构2。
[0027]
具体实施过程中,所述水炮系统3通过水管连接在机器人车体1的前部,包括水炮系统3包括底部设置水炮控制盒31,水炮控制盒31与炮身32连接,炮身32前端安装设置有炮头33;炮身32上安装设置有火源识别34和水泡照明灯35;
[0028]
具体实施过程中,水炮系统3通过水管与进水口9连接,水炮系统3与进水口22之间的水管上设有两个电磁阀,用于控制水炮系统3水源的通断以及水量的大小,电磁阀均与水
炮控制盒31线路连接,所述电池阀通过水管还与喷淋系统6连接。
[0029]
具体实施过程中,喷淋系统6包括主喷淋头61和辅喷淋头62,分别设置在机器人车体1的两边,当机器人温度过高时,打开电磁阀通过主喷淋头61和辅喷淋头62给机器人进行降温。
[0030]
具体实施过程中,水炮水炮控制盒31,对水炮俯仰和旋转电机进行下发指令,实现水炮的俯仰和旋转动作,对炮头33进行控制,实现水炮的开花和直流效果,满足不同的灭火场景需求。
[0031]
具体实施过程中,摄像头系统4设置在所述机器人车体1的前部和顶部,包含云台41和广角摄像头42。
[0032]
具体实施过程中,履带行走机构2包括承重支架21,安装在车体两边,前支撑轮22,中间支撑轮23与固定架24、减震器25分别通过铰链连接,固定架24、减震器25与承重支架21分别通过轴进行旋转相连;前支撑轮22,中间支撑轮23位于整个机器人的底部,在行走中与地面基本贴紧,为避免机器人行驶过程中承重轮进入泥土,石子等杂物,避免驱动部件锈蚀,所述前支撑轮22,中间支撑轮23的两侧均设有防尘盖26;前涨紧轮27、中间涨紧轮28与承重支架21固定连接,可调节涨紧轮2.0的位置可通过长螺钉沿所述承重支架21前后调整,用于调节履带20的张紧程度,驱动轮29通过车体与液压马达旋转连接。
[0033]
具体实施过程中,避障系统8包括气体探测器81和超声波传感器82,超声波传感器82安装在水泡系统3下边的广角摄像头42一侧;气体探测器81安装在主喷淋头一侧;超声波传感器82和气体探测器81分别与控制盒11连接。
[0034]
具体实施过程中,所述机器人车体1后端安装有急停开关10,散热通风孔1
‑
2安装在机器人车体1后端的中间位置,进水口9上边设置有仪表盘1
‑
3。
[0035]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1