一种人体臂部骨骼动作模拟演示驱动装置的制作方法
1.本实用新型涉及臂部动作模拟演示教学领域,尤其涉及一种人体臂部骨骼动作模拟演示驱动装置。
背景技术:
2.一般的在医学上为了更加让学生了解人体臂部关节运动状态,更加详细直观的了解各个动作臂部的骨骼位置变化,常见的模拟演示模型中采用的方式为简单的臂部骨骼模型结构,通过人工手持的方式进行相关的演示,十分不方便;因此需要一种能够实现人体臂部骨骼动模模拟演示的驱动装置来实现臂部骨骼的动态演示,无需人工手持演示。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种人体臂部骨骼动作模拟演示驱动装置,能够解决一般的医学演示人体臂部骨骼动作原理的时候需要人工摆动模型十分麻烦的问题。
4.为解决上述技术问题,本实用新型的技术方案为:一种人体臂部骨骼动作模拟演示驱动装置,其创新点在于:包括透明壳体、支撑块、夹持罩和驱动模块;
5.所述透明壳体呈长方体壳状结构,且底端开口;所述支撑块具有若干个且呈直线排布,所述支撑块的顶端开有放置夹持罩的弧形凹槽;
6.所述夹持罩具有两段分别为第一夹持罩和第二夹持罩;所述第一夹持罩与第二夹持罩之间铰接,所述第一夹持罩截面与第二夹持罩截面均为半圆形结构;所述第一夹持罩与第二夹持罩内均设置有与人体臂部骨骼模型贴合的软胶固定层;
7.所述驱动模块包括气缸安装板和气缸组;所述气缸安装板通过螺栓安装在透明壳体的内壁上;所述气缸组包括第一气缸单元和第二气缸单元;所述第一气缸单元的尾端铰接在气缸安装板的一端上,所述第一气缸单元的输出端与第一夹持罩外的表面相连,通过第一气缸单元驱动第一夹持罩绕着第一夹持罩与第二夹持罩之间的铰接点旋转;所述第二气缸单元的尾端铰接在气缸安装板的另一端上,所述第二气缸单元的输出与第二夹持罩的外表面相连,通过第二气缸单元驱动第二夹持罩旋转。
8.进一步的,所述第一夹持罩的表面与第二夹持罩的表面上均设置有与气缸组相连的铰接环。
9.进一步的,所述气缸安装板呈l型结构,且气缸安装板通过螺栓锁紧在透明壳体的顶部内壁上。
10.本实用新型的优点在于:
11.1)本实用新型中通过在夹持人体臂部骨骼模型的夹持罩上采用驱动模块进行驱动,避免在进行演示的过程中人工驱动夹持罩内的人体臂部骨骼模型,实现了自动化的驱动演示的目的。
附图说明
12.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
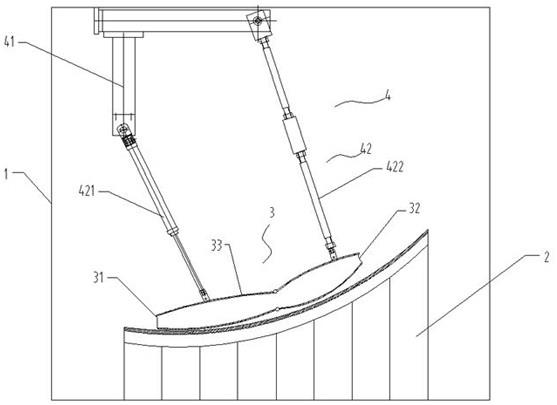
13.图1为本实用新型的一种人体臂部骨骼动作模拟演示驱动装置的结构图。
具体实施方式
14.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
15.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0017] 在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该 实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0018]
此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
[0019]
在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0020]
如图1所示的一种人体臂部骨骼动作模拟演示驱动装置,包括透明壳体1、支撑块2、夹持罩3和驱动模块4。
[0021]
透明壳体1呈长方体壳状结构,且底端开口;支撑块2具有若干个且呈直线排布,支撑块2的顶端开有放置夹持罩3的弧形凹槽。
[0022]
夹持罩3具有两段分别为第一夹持罩31和第二夹持罩32;第一夹持罩31与第二夹持罩32之间铰接,第一夹持罩31截面与第二夹持罩32截面均为半圆形结构;第一夹持罩31与第二夹持罩32内均设置有与人体臂部骨骼模型贴合的软胶固定层33。
[0023]
驱动模块4包括气缸安装板41和气缸组42;气缸安装板41通过螺栓安装在透明壳体的内壁上;气缸组42包括第一气缸单元421和第二气缸单元422;第一气缸单元421的尾端铰接在气缸安装板41的一端上,第一气缸单元421的输出端与第一夹持罩31外的表面相连,
通过第一气缸单元421驱动第一夹持罩31绕着第一夹持罩31与第二夹持罩32之间的铰接点旋转;第二气缸单元422的尾端铰接在气缸安装板41的另一端上,第二气缸单元422的输出与第二夹持罩32的外表面相连,通过第二气缸单元422驱动第二夹持罩32旋转。
[0024]
第一夹持罩31的表面与第二夹持罩2的表面上均设置有与气缸组42相连的铰接环。
[0025]
气缸安装板41呈l型结构,且气缸安装板41通过螺栓锁紧在透明壳体1的顶部内壁上。
[0026]
本实用新型的工作原理是:通过在夹持人体臂部骨骼模型的夹持罩上采用驱动模块进行驱动,避免在进行演示的过程中人工驱动夹持罩内的人体臂部骨骼模型,实现了自动化的驱动演示的目的。
[0027]
本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种人体臂部骨骼动作模拟演示驱动装置,其特征在于:包括透明壳体、支撑块、夹持罩和驱动模块;所述透明壳体呈长方体壳状结构,且底端开口;所述支撑块具有若干个且呈直线排布,所述支撑块的顶端开有放置夹持罩的弧形凹槽;所述夹持罩具有两段分别为第一夹持罩和第二夹持罩;所述第一夹持罩与第二夹持罩之间铰接,所述第一夹持罩截面与第二夹持罩截面均为半圆形结构;所述第一夹持罩与第二夹持罩内均设置有与人体臂部骨骼模型贴合的软胶固定层;所述驱动模块包括气缸安装板和气缸组;所述气缸安装板通过螺栓安装在透明壳体的内壁上;所述气缸组包括第一气缸单元和第二气缸单元;所述第一气缸单元的尾端铰接在气缸安装板的一端上,所述第一气缸单元的输出端与第一夹持罩外的表面相连,通过第一气缸单元驱动第一夹持罩绕着第一夹持罩与第二夹持罩之间的铰接点旋转;所述第二气缸单元的尾端铰接在气缸安装板的另一端上,所述第二气缸单元的输出与第二夹持罩的外表面相连,通过第二气缸单元驱动第二夹持罩旋转。2.根据权利要求1所述的一种人体臂部骨骼动作模拟演示驱动装置,其特征在于:所述第一夹持罩的表面与第二夹持罩的表面上均设置有与气缸组相连的铰接环。3.根据权利要求1所述的一种人体臂部骨骼动作模拟演示驱动装置,其特征在于:所述气缸安装板呈l型结构,且气缸安装板通过螺栓锁紧在透明壳体的顶部内壁上。
技术总结
本实用新型涉及一种人体臂部骨骼动作模拟演示驱动装置,其特征在于:包括透明壳体、支撑块、夹持罩和驱动模块;本实用新型中通过在夹持人体臂部骨骼模型的夹持罩上采用驱动模块进行驱动,避免在进行演示的过程中人工驱动夹持罩内的人体臂部骨骼模型,实现了自动化的驱动演示的目的。驱动演示的目的。驱动演示的目的。
技术研发人员:马玉琴
受保护的技术使用者:马玉琴
技术研发日:2021.04.09
技术公布日:2021/11/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1