柔性成型装置
1.本实用新型涉及一种机械工程中材料塑性成形设备,具体涉及一种柔性成型装置。
背景技术:
2.柔性成型是一种先进的金属成型技术,具有材料损耗小,无需模具,产品的灵活性和多样性高等特点,广泛应用于板材加工等方面,是先进制造技术的重要领域。
3.现有的柔性成型设备大多体型巨大,刀具臂或者旋轮臂大且长,刀具或者旋轮的轨迹复杂。例如莫健华等人设计的单点渐进成型设备。
技术实现要素:
4.本实用新型是要提供一种柔性成型装置,用于克服现有的柔性加工设备,设备巨大,刀具臂或者旋轮臂大且长,刀具或者旋轮的轨迹复杂的缺点,将刀具的复杂运动,拆分成简单刀具和主轴运动,完成坯料的加工。
5.为实现如上目的,本实用新型采取了如下的方案
6.一种柔性成型装置,包括刀具运动机构和主轴运动机构,所述刀具运动机构上连接旋轮部件,由所述刀具运动机构驱动旋轮刀具部件,实现在垂直轴z方向和水平轴y方向上的运动,从而实现旋轮刀具部件在y-z平面上的运动;所述主轴运动机构上安装有主轴托台,由主轴运动机构带动主轴托台及其主轴托台上的坯料在纵向轴x方向上运动,从而使旋轮刀具部件相对于坯料实现空间运动。
7.进一步,所述刀具运动机构由垂直轴z方向和水平轴y方向上的运动部件组成,所述垂直轴z方向运动部件上连接水平轴y方向上的运动部件。
8.进一步,所述垂直轴z方向运动部件中的z轴壳体固定在支架上,z轴壳体内安装有z轴丝杠,z轴丝杠的一端通过联轴器连接z轴步进电机,z轴壳体上安装有z轴滑块,z轴滑块上固定有水平轴y方向上的运动部件。
9.进一步,所述水平轴y方向上的运动部件中的电机导轨固定在支架上,电机导轨上安装有y轴步进电机,使y轴步进电机可以在电机导轨上滑动,y轴步进电机通过联轴器连接y轴丝杠,y轴丝杠外有y轴壳体,y轴壳体前端内设有连接y轴丝杠的y轴滑块,y轴滑块上固定连接纵向壳体,纵向壳体上上固定连接旋轮刀具部件,由y轴步进电机带动y轴丝杠转动,从而实现旋轮刀具部件中在y轴方向上运动。
10.进一步,所述旋轮刀具部件旋轮中的旋轮安装在旋轮臂上,随着旋轮臂一同运动,旋轮上安装有无刷电机,实现旋轮额定转速转动。
11.进一步,所述主轴运动机构中的x轴壳体上安装有主轴托台,主轴托台通过轴承座安装主轴,主轴后端安装有步进电机,前端安装有通用芯模,固定在后端的轴承座固定连接气动装置,所述气动装置与通用芯模接触将坯料固定,由所述步进电机控制主轴旋转角度精确,从而实现坯料旋转角度的精确控制。
12.进一步,所述气动装置与主轴处于同一轴心线上。
13.本实用新型的有益效果:
14.本实用新型克服了现有的柔性加工设备,设备巨大,刀具臂或者旋轮臂大且长,刀具或者旋轮的轨迹复杂的缺点,完成坯料的加工。
附图说明
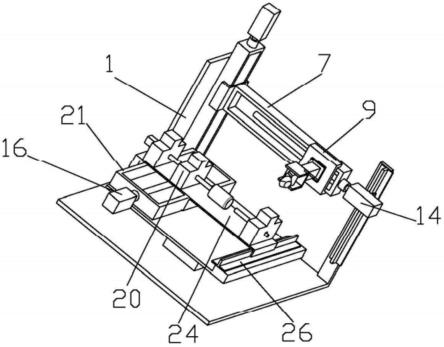
15.图1为本实用新型总体结构的示意图;
16.图2为本实用新型y轴部分,z轴部分,旋轮臂及旋轮结构的示意图;
17.图3为本实用新型x轴部分,主轴部分结构的示意图;
18.图中,支架1,z轴步进电机2,联轴器3,z轴壳体4,z轴滑块5,z轴丝杠6,y轴壳体7,y轴丝杠8,y轴滑块9,旋轮臂10,无刷电机11,旋轮12,y轴联轴器13,y轴步进电机14,电机导轨15。x轴步进电机16,联轴器17,x轴丝杠18,直流减速电机19,轴承座20,x轴壳体21,主轴22,通用芯模23,主轴托台24,气动装置25,托台导轨26。
具体实施方式
19.下面结合附图,具体说明本实用新型的实施例。
20.如图1至图3所示,一种柔性成型装置,主要有五部分组成,首先是z轴壳体4部分,z轴壳体4固定在支架1上,z轴壳体4内安装有z轴丝杠6,z轴丝杠6的一端则安装有联轴器3和z轴步进电机2,z轴壳体4上安装有z轴滑块5,z轴滑块5上固定有y轴壳体7部分。当z轴步进电机2工作时,将会带动z轴丝杠6旋转,z轴丝杠6旋转,则带动z轴滑块5滑动,实现控制y轴壳体7在z方向上的运动。
21.其次是y轴壳体部分,支架1上固定有电机导轨15,电机导轨15上安装有y轴步进电机14,使y轴步进电机14可以在电机导轨15上滑动,y轴步进电机14上连接有y轴联轴器13和y轴丝杠8,y轴丝杠8外有y轴壳体7,y轴壳体7前端内设有连接y轴丝杠8的y轴滑块9,y轴滑块9上固定连接纵向壳体,纵向壳体上上固定连接旋轮臂10。y轴步进电机14工作时将会带动y轴丝杠8转动,从而实现旋轮12在y轴方向上运动。从而实现旋轮在y-z平面上是运动。
22.接着是x轴壳体部分,支架1上固定有x轴壳体21,x轴壳体21内设有x轴丝杠18,x轴丝杠18与x轴步进电机16通过联轴器相连。x轴壳体21上安装有主轴托台24,主轴托台24通过x轴滑块与x轴丝杠18连接。当x轴步进电机19工作时,将会带动主轴托台24及其轴托台24上各种零件在x轴方向上运动。从而实现旋轮相对于坯料实现空间运动。
23.接着是旋轮部分,旋轮12固定在旋轮臂10上,随着旋轮臂10一同运动,旋轮12上安装有无刷电机11,实现旋轮12额定转速转动。旋轮转动部分有无刷电机11,旋轮12,实现旋轮的定速转动。本实验定速转动只有旋轮,提供加工压力。
24.最后是主轴部分,x轴壳体21上安装有主轴托台24,主轴托台24上固定有三个相同的轴承座20,前部两个轴承座20内安装有主轴22,主轴22后端安装有直流减速电机19,前端安装有通用芯模23,气动装置25固定在后端的轴承座20上,气动装置25与主轴22同轴心,气动装置25与通用芯模23接触将坯料固定。支架1上固定有托台导轨26,托台导轨26同主轴托台24相连。直流减速电机19可以实现主轴旋转角度精确控制,从而实现坯料旋转角度的精确控制。最后实现坯料的柔性成型。
25.当z轴步进电机2与电机导轨15工作时,带动壳体上滑块运动,实现旋轮臂的y-z平面的运动,x轴步进电机16工作时,带动主轴托台在x轴方向上运动,实现旋轮相对于坯料的空间运动。本实验需要给三个步进电机指令,就能实现旋轮相对于坯料某一面的加工。
26.本实验需要电机精确控制旋转角度,当旋轮需要加工坯料的不同位置时,可以给电机指令,带动坯料旋转到需要的角度。再结合上述结构就可以实现旋轮对坯料任意面的加工。
技术特征:
1.一种柔性成型装置,包括刀具运动机构和主轴运动机构,其特征在于:所述刀具运动机构上连接旋轮部件,由所述刀具运动机构驱动旋轮刀具部件,实现在垂直轴z方向和水平轴y方向上的运动,从而实现旋轮刀具部件在y-z平面上的运动;所述主轴运动机构上安装有主轴托台,由主轴运动机构带动主轴托台及其主轴托台上的坯料在纵向轴x方向上运动,从而使旋轮刀具部件相对于坯料实现空间运动。2.根据权利要求1所述的柔性成型装置,其特征在于:所述刀具运动机构由垂直轴z方向和水平轴y方向上的运动部件组成,所述垂直轴z方向运动部件上连接水平轴y方向上的运动部件。3.根据权利要求2所述的柔性成型装置,其特征在于:所述垂直轴z方向运动部件中的z轴壳体固定在支架上,z轴壳体内安装有z轴丝杠,z轴丝杠的一端通过联轴器连接z轴步进电机,z轴壳体上安装有z轴滑块,z轴滑块上固定有水平轴y方向上的运动部件。4.根据权利要求2所述的柔性成型装置,其特征在于:所述水平轴y方向上的运动部件中的电机导轨固定在支架上,电机导轨上安装有y轴步进电机,使y轴步进电机可以在电机导轨上滑动,y轴步进电机通过联轴器连接y轴丝杠,y轴丝杠外有y轴壳体,y轴壳体前端内设有连接y轴丝杠的y轴滑块,y轴滑块上固定连接纵向壳体,纵向壳体上固定连接旋轮刀具部件,由y轴步进电机带动y轴丝杠转动,从而实现旋轮刀具部件中在y轴方向上运动。5.根据权利要求1所述的柔性成型装置,其特征在于:所述旋轮刀具部件旋轮中的旋轮安装在旋轮臂上,随着旋轮臂一同运动,旋轮上安装有无刷电机,实现旋轮额定转速转动。6.根据权利要求1所述的柔性成型装置,其特征在于:所述主轴运动机构中的x轴壳体上安装有主轴托台,主轴托台通过轴承座安装主轴,主轴后端安装有步进电机,前端安装有通用芯模,固定在后端的轴承座固定连接气动装置,所述气动装置与通用芯模接触将坯料固定,由所述步进电机控制主轴旋转角度精确,从而实现坯料旋转角度的精确控制。7.根据权利要求6所述的柔性成型装置,其特征在于:所述气动装置与主轴处于同一轴心线上。
技术总结
本实用新型涉及一种柔性成型装置,包括刀具运动机构和主轴运动机构,所述刀具运动机构上连接旋轮部件,由所述刀具运动机构驱动旋轮刀具部件,实现在垂直轴Z方向和水平轴Y方向上的运动,从而实现旋轮刀具部件在Y-Z平面上的运动;所述主轴运动机构上安装有主轴托台,由主轴运动机构带动主轴托台及其主轴托台上的坯料在纵向轴X方向上运动,从而使旋轮刀具部件相对于坯料实现空间运动。本实用新型克服了现有的柔性加工设备,设备巨大,刀具臂或者旋轮臂大且长,刀具或者旋轮的轨迹复杂的缺点,完成坯料的加工。完成坯料的加工。完成坯料的加工。
技术研发人员:徐春 陈润豪 赵晋政
受保护的技术使用者:上海应用技术大学
技术研发日:2021.06.17
技术公布日:2022/9/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1