多用途机器人焊接装置的制作方法
1.本实用新型涉及焊接工件领域,特别涉及多用途机器人焊接装置。
背景技术:
2.在现有的自动化生产过程中,一些焊接工件的长条形构件、异形构件等焊接繁琐的工序,往往会影响到自动化的效率,在调查了解到原有的方案多为机器人手持焊枪来完成,在这些自动化产线上,普遍采用人机配合的操作方式,机器人手持的焊枪在运动过程中,可能会因为构件类型繁多而导致焊接不良或者人工调试;故针对此问题,设计出了一套多用途机器人焊接装置,消除了种类繁多、构件多样而焊接不良或者反复人工调试的缺点,提高了生产效率,同时保证了工人的人身安全。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有技术的缺陷,提供多用途机器人焊接装置。
4.本实用新型提供了如下的技术方案:
5.本实用新型提供一种多用途机器人焊接装置,包括防松顶丝、调整卡件、调整管a、机器人连接件、机器人卡盘、内六角圆柱头螺钉、调整管b、调整管c、焊枪调整卡件和焊枪,其中调整管c的数量为两根,分别安装于调整管a的两侧底端,形成冂字形结构,所述调整管a上安装有三个调整卡件,且分别位于调整管a的中部和调整管a的两端部,所述调整管a的两端部通过调整卡件和调整管c进行连接,每个调整卡件上都安装有防松顶丝和内六角圆柱头螺钉,位于调整管a中部的调整卡件底部还通过调整管b连接安装有焊枪调整卡件,所述调整管a的中央顶部通过机器人连接件固定安装有机器人卡盘,位于调整管a两侧垂直的调整管c的底端也都安装有焊枪调整卡件,所述焊枪调整卡件转动连接有焊枪。
6.作为本实用新型的一种优选技术方案,所述焊枪调整卡件和焊枪之间通过转动螺栓进行夹紧,松开后可转动调节焊枪角度。
7.作为本实用新型的一种优选技术方案,所述焊枪调整卡件上也安装有防松顶丝和内六角圆柱头螺钉,且焊枪调整卡件分别和调整管b、调整管c上下滑动连接,并通过内六角圆柱头螺钉实现固定以此调节焊枪的距离。
8.作为本实用新型的一种优选技术方案,所述调整管a通过机器人卡盘外接6轴机器人,且机器人卡盘固定在6轴机器人的6轴法兰上。
9.与现有技术相比,本实用新型的有益效果如下:
10.本多用途机器人焊接装置的设计,使得工件焊接由原来单一及焊接不到位等繁琐工序合理化,保证了工作效率,降低了产品的不良率,提高了企业的效益;
11.焊枪可调工件多角度、距离可调的设计,保证了在工作时工件焊接效果良好,效率高,经过生产实践检验是一套可有效提高生产效率、焊接效果优良且适用于多种类复杂工件焊接的可靠装置。
附图说明
12.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
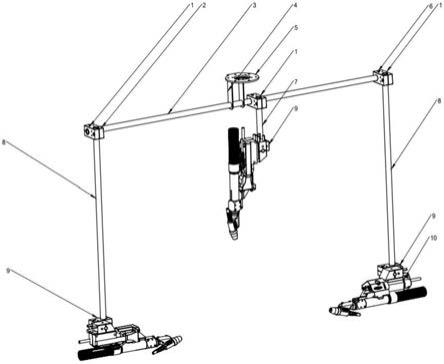
13.图1是本实用新型的结构图;
14.图中:1、防松顶丝;2、调整卡件;3、调整管a;4、机器人连接件;5、机器人卡盘;6、内六角圆柱头螺钉;7、调整管b;8、调整管c;9、焊枪调整卡件;10、焊枪。
具体实施方式
15.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。其中附图中相同的标号全部指的是相同的部件。
16.此外,如果已知技术的详细描述对于示出本实用新型的特征是不必要的,则将其省略。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
17.实施例1
18.如图1,本实用新型提供一种多用途机器人焊接装置,包括防松顶丝1、调整卡件2、调整管a3、机器人连接件4、机器人卡盘5、内六角圆柱头螺钉6、调整管b7、调整管c8、焊枪调整卡件9和10焊枪,其中调整管c8的数量为两根,分别安装于调整管a3的两侧底端,形成冂字形结构,调整管a3上安装有三个调整卡件2,且分别位于调整管a3的中部和调整管a3的两端部,调整管a3的两端部通过调整卡件2和调整管c8进行连接,每个调整卡件2上都安装有防松顶丝1和内六角圆柱头螺钉6,位于调整管a3中部的调整卡件2底部还通过调整管b7连接安装有焊枪调整卡件9,调整管a3的中央顶部通过机器人连接件4固定安装有机器人卡盘5,位于调整管a3两侧垂直的调整管c8的底端也都安装有焊枪调整卡件9,焊枪调整卡件9转动连接有焊枪10。
19.焊枪调整卡件9和焊枪10之间通过转动螺栓进行夹紧,松开后可转动调节焊枪10角度。
20.焊枪调整卡件9上也安装有防松顶丝1和内六角圆柱头螺钉6,且焊枪调整卡件9分别和调整管b7、调整管c8上下滑动连接,并通过内六角圆柱头螺钉6实现固定以此调节焊枪10的距离。
21.调整管a3通过机器人卡盘5外接6轴机器人,且机器人卡盘5固定在6轴机器人的6轴法兰上。
22.本申请文件中所有结构部件在外形尖锐处均设置有倒角,加强安全效果。
23.多用途机器人焊接装置工作原理:
24.1、本机构装置可根据不同工件类型、使用场所、机器人规格灵活修改调整,适用范围广泛,同时调整不同的调整卡件就可以焊接不同种类的工件,适用于汽车行业焊接长条形构件、异形构件等多种类型工件;
25.2、该装置利用到了6轴机器人的多自由度活动,把本套装置转动单元(即机器人卡盘5)固定在机器人的6轴法兰上,转动的同时与机器人的6轴转轴同心,对机器人的轨迹示教较为方便;
26.3、传统的焊接方式单一,在对长条形或者形状复杂的工件焊接时,可能焊接不良或者人工调试,故针对此点,把焊接设计成三工位且可扩展,从三个方向焊接汽车构件,保证了焊接均匀合理(即整个装置结构为冂字形结构,总共三个焊枪10,分别位于两侧以及中间);
27.4、每个焊枪10由多角度可调的焊枪调整卡件9连接,可根据需要调整角度和距离;
28.5、松开内六角圆柱头螺钉6的同时松开防松顶丝1,可以转动焊枪可调卡件9的卡扣,即可调整焊10的位置以及角度;
29.6、整套装置外形尖锐处倒角,设计紧凑合理,效率高。
30.进一步的,本多用途机器人焊接装置的设计,使得工件焊接由原来单一及焊接不到位等繁琐工序合理化,保证了工作效率,降低了产品的不良率,提高了企业的效益;
31.焊枪10可调工件多角度、距离可调的设计,保证了在工作时工件焊接效果良好,效率高,经过生产实践检验是一套可有效提高生产效率、焊接效果优良且适用于多种类复杂工件焊接的可靠装置。
32.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.多用途机器人焊接装置,其特征在于,包括防松顶丝(1)、调整卡件(2)、调整管a(3)、机器人连接件(4)、机器人卡盘(5)、内六角圆柱头螺钉(6)、调整管b(7)、调整管c(8)、焊枪调整卡件(9)和焊枪(10),其中调整管c(8)的数量为两根,分别安装于调整管a(3)的两侧底端,形成冂字形结构,所述调整管a(3)上安装有三个调整卡件(2),且分别位于调整管a(3)的中部和调整管a(3)的两端部,所述调整管a(3)的两端部通过调整卡件(2)和调整管c(8)进行连接,每个调整卡件(2)上都安装有防松顶丝(1)和内六角圆柱头螺钉(6),位于调整管a(3)中部的调整卡件(2)底部还通过调整管b(7)连接安装有焊枪调整卡件(9),所述调整管a(3)的中央顶部通过机器人连接件(4)固定安装有机器人卡盘(5),位于调整管a(3)两侧垂直的调整管c(8)的底端也都安装有焊枪调整卡件(9),所述焊枪调整卡件(9)转动连接有焊枪(10)。2.根据权利要求1所述的多用途机器人焊接装置,其特征在于,所述焊枪调整卡件(9)和焊枪(10)之间通过转动螺栓进行夹紧,松开后可转动调节焊枪(10)角度。3.根据权利要求1所述的多用途机器人焊接装置,其特征在于,所述焊枪调整卡件(9)上也安装有防松顶丝(1)和内六角圆柱头螺钉(6),且焊枪调整卡件(9)分别和调整管b(7)、调整管c(8)上下滑动连接,并通过内六角圆柱头螺钉(6)实现固定以此调节焊枪(10)的距离。4.根据权利要求1所述的多用途机器人焊接装置,其特征在于,所述调整管a(3)通过机器人卡盘(5)外接6轴机器人,且机器人卡盘(5)固定在6轴机器人的6轴法兰上。
技术总结
本实用新型公开了一种多用途机器人焊接装置,包括防松顶丝、调整卡件、调整管a、机器人连接件、机器人卡盘、内六角圆柱头螺钉、调整管b、调整管c、焊枪调整卡件和焊枪,位于调整管a两侧垂直的调整管c的底端也都安装有焊枪调整卡件,焊枪调整卡件转动连接有焊枪。本多用途机器人焊接装置的设计,使得工件焊接由原来单一及焊接不到位等繁琐工序合理化,保证了工作效率,降低了产品的不良率,提高了企业的效益;焊枪可调工件多角度、距离可调的设计,保证了在工作时工件焊接效果良好,效率高,经过生产实践检验是一套可有效提高生产效率、焊接效果优良且适用于多种类复杂工件焊接的可靠装置。优良且适用于多种类复杂工件焊接的可靠装置。优良且适用于多种类复杂工件焊接的可靠装置。
技术研发人员:逄政
受保护的技术使用者:上海众冠智能设备有限公司
技术研发日:2021.08.23
技术公布日:2022/4/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1