一种塔脚机器人自动焊接装置的制作方法
1.本实用新型涉及一种焊接机器人,具体是一种塔脚机器人自动焊接装置。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割) 枪的,使之能进行焊接,切割或热喷涂。目前焊接机器人也用于塔脚的焊接,但是用于放置塔脚的操作台比较固定,塔角形状相似,但是品种多,批量小,不方便进行调节,适应性比较差,另外整体的结构比较大,占用面积大,不能更好分配各个设备。
技术实现要素:
3.为了解决上述问题,本实用新型的目的是提供一种塔脚机器人自动焊接装置。
4.为实现上述目的,本实用新型的技术方案为:一种塔脚机器人自动焊接装置,包括底座总成和设置在底座总成上的十字架夹紧装置,十字架夹紧装置的中心部位固定在旋转电机的驱动轴上,十字架夹紧装置一侧的底座总成上固定有焊接机器人,十字架夹紧装置包括十字支架和设置在十字支架各端的旋转法兰,十字支架的每直线部分分别设置有丝杠,每条丝杠的两端分别设置有塔脚夹块,塔脚夹块的内螺纹结构与丝杠的螺纹相啮合,旋转电机固定在翻转架的中心,翻转架的其中一端转轴位于轴承座内,翻转架的另一端与旋转减速电机的驱动轴固定连接。
5.进一步地,塔脚夹块为圆柱形,且外侧壁设置有多圈环状的凹槽。
6.进一步地,十字架夹紧装置的一端设置有位于底座总成上的清枪器总成。
7.进一步地,底座总成上还设置有配电箱和机器人电柜。
8.进一步地,焊接机器人一侧的底座总成上设置有桶装焊丝及焊丝支架。
9.进一步地,焊接机器人固定在底座总成表面的机器人立柱上。
10.进一步地,底座总成的前侧设置有支撑板,且支撑板的外侧边沿为斜面。
11.通过以上设置,本实用新型采用plc电脑控制,使用焊接机器人焊接,精准控制焊接速度和位置,十字架夹紧装置可以对多种塔脚进行夹持,几乎对型号没有特别要求,适应性更强,自动化程度高,减轻了工人的劳动强度,改善了工作环境,整体设备排列更合理,现场调试方便,占地面积小。
附图说明
12.现结合附图对本实用新型做进一步说明。
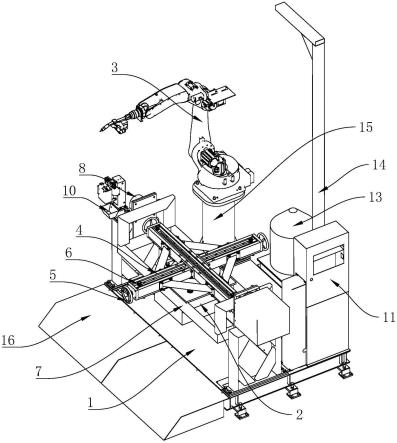
13.图1为本实用新型的立体结构示意图;
14.图2为本实用新型的俯视结构示意图。
具体实施方式
15.如图1-2所示,一种塔脚机器人自动焊接装置,包括底座总成1 和设置在底座总成1上的十字架夹紧装置,十字架夹紧装置的中心部位固定在旋转电机2的驱动轴上,十字架夹紧装置一侧的底座总成1 上固定有焊接机器人3,十字架夹紧装置包括十字支架4和设置在十字支架4各端的旋转法兰5,十字支架4的每直线部分分别设置有丝杠,每条丝杠的两端分别设置有塔脚夹块6,塔脚夹块6的内螺纹结构与丝杠的螺纹相啮合,旋转电机2固定在翻转架7的中心,翻转架 7的其中一端转轴位于轴承座8内,翻转架7的另一端与旋转减速电机9的驱动轴固定连接。
16.塔脚夹块6为圆柱形,且外侧壁设置有多圈环状的凹槽,十字架夹紧装置的一端设置有位于底座总成1上的清枪器总成10,底座总成 1上还设置有配电箱11和机器人电柜12,焊接机器人3一侧的底座总成1上设置有桶装焊丝13及焊丝支架14,焊接机器人3固定在底座总成1表面的机器人立柱15上,底座总成1的前侧设置有支撑板16,且支撑板16的外侧边沿为斜面。
17.本实用新型工作原理:测量工件得出机器人焊接参数,然后将工件吊装至翻转架7上,用十字架夹紧装置固定牢固,向焊接机器人3 输入测量参数后即可一键启动设备进行焊接。
18.以上所述仅为本实用新型示意性的具体实施方式,并非用以限定本实用新型的范围。任何本领域的技术人员,在不脱离本实用新型的构思和原则的前提下所作出的等同变化与修改,均应属于本实用新型保护的范围。
技术特征:
1.一种塔脚机器人自动焊接装置,包括底座总成(1)和设置在底座总成(1)上的十字架夹紧装置,十字架夹紧装置的中心部位固定在旋转电机(2)的驱动轴上,十字架夹紧装置一侧的底座总成(1)上固定有焊接机器人(3),其特征在于:十字架夹紧装置包括十字支架(4)和设置在十字支架(4)各端的旋转法兰(5),十字支架(4)的每直线部分分别设置有丝杠,每条丝杠的两端分别设置有塔脚夹块(6),塔脚夹块(6)的内螺纹结构与丝杠的螺纹相啮合,旋转电机(2)固定在翻转架(7)的中心,翻转架(7)的其中一端转轴位于轴承座(8)内,翻转架(7)的另一端与旋转减速电机(9)的驱动轴固定连接。2.如权利要求1所述的一种塔脚机器人自动焊接装置,其特征在于:塔脚夹块(6)为圆柱形,且外侧壁设置有多圈环状的凹槽。3.如权利要求1所述的一种塔脚机器人自动焊接装置,其特征在于:十字架夹紧装置的一端设置有位于底座总成(1)上的清枪器总成(10)。4.如权利要求1所述的一种塔脚机器人自动焊接装置,其特征在于:底座总成(1)上还设置有配电箱(11)和机器人电柜(12)。5.如权利要求1所述的一种塔脚机器人自动焊接装置,其特征在于:焊接机器人(3)一侧的底座总成(1)上设置有桶装焊丝(13)及焊丝支架(14)。6.如权利要求1所述的一种塔脚机器人自动焊接装置,其特征在于:焊接机器人(3)固定在底座总成(1)表面的机器人立柱(15)上。7.如权利要求1所述的一种塔脚机器人自动焊接装置,其特征在于:底座总成(1)的前侧设置有支撑板(16),且支撑板(16)的外侧边沿为斜面。
技术总结
本实用新型公开了一种塔脚机器人自动焊接装置,包括底座总成和设置在底座总成上的十字架夹紧装置,十字架夹紧装置的中心部位固定在旋转电机的驱动轴上,十字架夹紧装置一侧的底座总成上固定有焊接机器人,十字架夹紧装置包括十字支架和设置在十字支架各端的旋转法兰,十字支架的每直线部分分别设置有丝杠,每条丝杠的两端分别设置有塔脚夹块,塔脚夹块的内螺纹结构与丝杠的螺纹相啮合,旋转电机固定在翻转架的中心,翻转架的其中一端转轴位于轴承座内,翻转架的另一端与旋转减速电机的驱动轴固定连接。本实用新型十字架夹紧装置可以对多种塔脚进行夹持,适应性更强,自动化程度高,整体设备排列更合理,现场调试方便,占地面积小。小。小。
技术研发人员:王磊磊 蒋宝炜 王志 赵东方 闫新宇 张益硕
受保护的技术使用者:山东省青腾机械科技有限公司
技术研发日:2022.05.03
技术公布日:2022/8/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1