一种基于多源数据融合的电磁阀寿命预测装置及方法
1.本发明涉及轨道车辆制动系统中电磁阀技术领域,尤其涉及一种基于多源数据融合的电磁阀寿命预测装置及方法。
背景技术:
2.随着高速列车运行速度的不断提高,列车运行的安全性和可靠性受到了广泛关注。列车制动系统是实现列车制动与缓解的关键系统。其缓解/制动是通过精确控制均衡风缸的压力,使得列车管快速响应进行充风/排风实现的。均衡风缸和列车管之间的气路变化与列车管的充/排风是通过电磁阀等关键部件的动作实现的。随着系统使用时间的增长,若电磁阀发生老化或故障会导致一系列的连锁反应,使整个系统不能正常运行,轻者造成列车停机,重者会产生严重的人员伤害。因此,对电磁阀的使用寿命进行较为准确的预测及评估有着重大的意义。
3.现有的电磁阀剩余使用寿命预测的方法有基于物理模型的、基于机器学习的和基于混合模型的三大类。基于物理模型的预测方法在已知系统失效机理和模型参数的情况下,建立准确的数学模型对系统进行剩余使用寿命预测,如专利《基于分阶段物理模型及粒子滤波的滚动轴承剩余寿命预测方法》建立轴承的机理模型,通过采集的轴承运行状态信号对其进行剩余使用寿命预测,然而这种方法不适用于结构复杂和故障机制复杂的系统;基于机器学习的方法根据机械设备大量的历史运行数据进行剩余使用寿命预测,如专利《一种机械设备的剩余使用寿命预测方法及装置》根据设备的各个状态数据,利用反向传播神经网络对设备进行剩余使用寿命预测,但是其预测准确度过度依赖数据集的完备程度。
4.列车制动系统具有内部结构复杂、工作模式多样、故障机制混杂的特点。已有专利《一种基于电流特征提取的电磁阀寿命预测方法及装置》通过单一的电流传感器预测电磁阀的使用寿命。然而,电磁阀存在线圈老化和润滑油失效等多种故障,若同时发生上述两种或多种故障,通过单一的电流传感器对电磁阀剩余使用寿命预测的准确度较低。
技术实现要素:
5.为了解决现有技术存在的上述技术问题,本发明提出一种基于多源数据融合的电磁阀寿命预测装置及方法,并实现了电磁阀剩余使用寿命的准确预测。
6.本发明解决上述技术问题的技术方案是:一种基于多源数据融合的电磁阀寿命预测装置,包括:均衡控制模块、数据采集模块和寿命预测模块;
7.均衡控制模块,通过制动控制单元对均衡风缸的目标压力和传感器反馈的实时压力进行比较,利用pwm脉宽调制方式控制电磁阀的充排风,实现均衡风缸压力的精准控制,并与数据采集模块电连接;
8.数据采集模块,利用传感器采集均衡风缸的压力信号、电磁阀组的电流信号;
9.寿命预测模块,利用采集到的数据提取特征指标,并采用自组织映射算法对特征进行融合,求解得到最小量化误差作为电磁阀的健康指标,以此健康指标和其对应的寿命
状态作为自回归模型和支持向量回归模型两个寿命预测子模块的输入,分别预测电磁阀剩余使用寿命;将两个寿命预测子模块的预测结果线性混合,利用粒子群优化算法对两个寿命预测子模块的权重参数进行调整,以实现电磁阀寿命的预测。
10.进一步的,所述均衡控制模块包括制动控制单元、充风阀、排风阀、均衡风缸和压力传感器;
11.所述制动控制单元与充风阀、排风阀、压力传感器的连接是电路连接;
12.所述均衡风缸与充风阀、排风阀、压力传感器的连接是气路连接;
13.所述风源与充风阀的连接是气路连接;
14.所述制动控制单元根据均衡风缸目标压力和实时压力的差值,采用pid控制算法控制充风阀和排风阀的充排风。
15.进一步的,所述数据采集模块包括电磁阀组、电流传感器、均衡风缸压力传感器和数据采集卡;
16.所述充风阀电流传感器与充风阀相连,用于采集充风阀的驱动电流;
17.所述排风阀电流传感器与排风阀相连,用于采集排风阀的驱动电流;
18.所述均衡风缸压力传感器与均衡风缸相连,用于采集均衡风缸的实时压力;
19.所述数据采集卡是型号为usb4222的高速采集卡,采样频率设置为10khz;
20.充风阀电流传感器、排风阀电流传感器和均衡风缸压力传感器均与数据采集卡相连。
21.进一步的,所述寿命预测模块包括特征提取模块、特征融合模块、第一寿命预测子模块、第二寿命预测子模块、寿命预测综合模块;
22.所述特征提取模块,用于通过电流传感器和压力传感器进行物理指标提取,并与特征融合模块电连接;
23.所述特征融合模块,用于基于自组织映射算法对特征提取层提取的特征进行融合,求解得到最小量化误差作为电磁阀的健康指标,并与第一寿命预测子模块和第二寿命预测子模块电连接;
24.所述第一寿命预测子模块,用于基于自回归模型对电磁阀进行寿命预测,并与寿命预测模块电连接;
25.所述第二寿命预测子模块,用于基于支持向量回归模型对电磁阀进行寿命预测,并与寿命预测模块电连接;
26.所述寿命预测综合模块,用于对两个寿命预测子模块的结果进行联合分析,以对电磁阀进行寿命预测。
27.本发明还提供一种基于多源数据融合的电磁阀寿命预测方法,其特征在于,
28.步骤s1:采用电流传感器和压力传感器提取表征电磁阀动作状态的物理指标;
29.步骤s2:采用自组织映射算法对利用不同传感器提取的物理指标进行融合,并求解健康指标;
30.步骤s3:将健康指标作为模型的输入,分别采用自回归模型和支持向量回归模型对电磁阀的寿命进行预测;
31.步骤s4:基于粒子群优化算法混合自回归模型和支持向量回归模型,对权重参数进行调整,实现电磁阀寿命的精准预测。
32.其中,步骤s1所述物理指标提取包括:
33.时域特征:最大值、均值、平均幅值、方根、幅值、均方值、均方根植、方差、标准差、偏斜度、峭度、波形因子、峰值因子、脉冲因子、裕度指标、峭度指标、偏度指标;
34.频域特征:平均频率、中心频率、均方频率、频率方差、平方根频率、幅值方差、幅值偏度指标、幅值峭度指标、频率标准差、频率歪度、频率峭度、平方根比率;
35.时频域特征:将原始信号通过集成经验模态分解,计算得imf1-imf8能量特征;
36.对每个子序列的均衡风缸压力信号、充风阀电流信号和排风阀电流信号提取上述时域、频域和时频域特征,形成特征向量。
37.其中,步骤s2所述健康指标的计算包括:
38.利用自组织映射算法求得最小量化误差,对最小量化误差进行了db5小波包分解,并将低维趋势项作为健康指标。
39.其中,步骤s3所述自回归模型参数的确定,包括:
40.所述自回归模型,需要确定模型阶数p和自回归系数αj,j=1,2,
…
,p,通过akaike信息准则确定模型阶数,具体计算方法为:
[0041][0042]
式中,n为样本数,p为阶数,为所拟合模型的残差方差;
[0043]
通过yule-walker方法估计ar模型的自回归系数αj,具体计算方法如下:
[0044][0045]
式中,τ为时间延迟,r
x
(τ)为互相关系数。
[0046]
其中,步骤s4包括:
[0047]
所述自回归模型和支持向量模型预测值分别为y1和y2,组合预测为ω1y1+ω2y2,则预测值与真值之间的偏差表示为
[0048]
zi=ω1y1(i)+ω2y2(i)-xi(i=1,2,
…
n)
[0049]
式中,n为样本数,xi为真实值;
[0050]
由此确定适应度函数为预测误差的平方和为:
[0051][0052]
s.t.ω1+ω2=1
[0053]
ω1≥0,ω2≥0
[0054]
通过粒子群优化算法对权重参数进行调整,实现混合模型对电磁阀剩余使用寿命的准确预测。
[0055]
本发明的有益效果:
[0056]
(1)本发明搭建的均衡控制模块和数据采集模块,能够很好的模拟列车的制动、保
压和缓解;能够实时监测均衡控制模块中均衡风缸压力、充风阀电流和排风阀电流的变化,为电磁阀剩余使用寿命的准确预测提高了数据基础。
[0057]
(2)本发明充分考虑了均衡风缸控制系统各部件协同工作的特点,利用多个关键部件的运行数据对电磁阀的剩余使用寿命进行预测,避免了采用单一的传感器数据对电磁阀进行剩余使用寿命进行预测准确度低的问题。
[0058]
(3)本发明通过粒子群优化算法对自回归模型和支持向量回归模型进行混合,调整权重参数,实现对电磁阀使用寿命的精准预测。
[0059]
本发明通过融合均衡控制系统中多个关键部件的传感器数据对电磁阀的剩余使用寿命进行预测,为电磁阀的及时维修提供决策支持和依据,保障制动系统的安全运行。
附图说明
[0060]
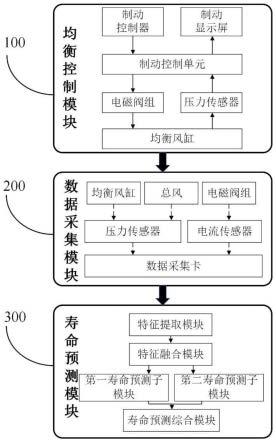
图1是本发明提供的电磁阀剩余使用寿命预测整体框图;
[0061]
图2是本发明中均衡控制模块的原理图;
[0062]
图3是本发明中均衡控制模块的压力调节流程图;
[0063]
图4是本发明中数据采集模块的结构图;
[0064]
图5是本发明中寿命预测模块的结构图;
[0065]
图6是本发明的流程图。
具体实施方式
[0066]
为了方便更好地理解本发明的内容,下面结合附图和具体实施例做进一步的阐述。
[0067]
如图1所示,图1为本发明提供的电磁阀剩余使用寿命预测整体框图包括均衡控制模块100、数据采集模块200和寿命预测模块300;所述均衡控制模块100,通过制动控制单元对均衡风缸的目标压力和传感器反馈的实时压力进行比较,利用pwm脉宽调制方式控制电磁阀的充排风,实现均衡风缸压力的精准控制,并与数据采集模块电连接;所述数据采集模块200,利用传感器采集均衡风缸的压力信号、电磁阀组的电流信号;所述寿命预测模块300,利用采集到的数据提取特征指标,并采用自组织映射算法对特征进行融合,求解得到最小量化误差作为电磁阀的健康指标,以此健康指标和其对应的寿命状态作为自回归模型和支持向量回归模型两个寿命预测子模块的输入,分别预测电磁阀剩余使用寿命;将两个寿命预测子模块的预测结果线性混合,利用粒子群优化算法对两个寿命预测子模块的权重参数进行调整,以实现电磁阀寿命的预测。
[0068]
所述均衡控制模块100包括制动控制单元、充风阀、排风阀、均衡风缸和压力传感器;
[0069]
所述制动控制单元与充风阀、排风阀、压力传感器的连接是电路连接;
[0070]
所述均衡风缸与充风阀、排风阀、压力传感器的连接是气路连接;
[0071]
所述风源与充风阀的连接是气路连接;
[0072]
所述制动控制单元根据均衡风缸目标压力和实时压力的差值,采用pid控制算法控制充风阀和排风阀的充排风。
[0073]
所述数据采集模块200包括电磁阀组、电流传感器、均衡风缸压力传感器和数据采
集卡;
[0074]
所述充风阀电流传感器与充风阀相连,用于采集充风阀的驱动电流;
[0075]
所述排风阀电流传感器与排风阀相连,用于采集排风阀的驱动电流;
[0076]
所述均衡风缸压力传感器与均衡风缸相连,用于采集均衡风缸的实时压力;
[0077]
所述数据采集卡是型号为usb4222的高速采集卡,采样频率设置为10khz;
[0078]
充风阀电流传感器、排风阀电流传感器和均衡风缸压力传感器均与数据采集卡相连。
[0079]
所述寿命预测模块300包括特征提取模块、特征融合模块、第一寿命预测子模块、第二寿命预测子模块、寿命预测综合模块;
[0080]
所述特征提取模块,用于通过电流传感器和压力传感器进行物理指标提取,并与特征融合模块电连接;
[0081]
所述特征融合模块,用于基于自组织映射算法对特征提取层提取的特征进行融合,求解得到最小量化误差作为电磁阀的健康指标,并与寿命预测子模块1和寿命预测子模块2电连接;
[0082]
所述第一寿命预测子模块,用于基于自回归模型对电磁阀进行寿命预测,并与寿命预测模块电连接;
[0083]
所述第二寿命预测子模块,用于基于支持向量回归模型对电磁阀进行寿命预测,并与寿命预测模块电连接;
[0084]
所述寿命预测综合模块,用于对两个寿命预测子模块的结果进行联合分析,以对电磁阀进行寿命预测。
[0085]
如图2所示,图2为本发明中均衡控制模块100原理图,均衡控制模块100包括电磁阀组、均衡风缸、制动控制单元、总风缸等元件。利用pwm脉冲宽度调制等手段,联合各元器件协同工作。
[0086]
如图3所示,图3为本发明中均衡控制模块100的压力调节流程图,在常用制动模式下,压力传感器采集均衡风缸的实时压力,并将其反馈到制动控制单元,制动控制单元将均衡风缸的目标压力与实时压力比较,当实时压力小于目标压力时,充风阀打开,通过风源给均衡风缸充风;当实时压力大于目标压力时,排风风阀打开,通过均衡风缸向大气排风;当实时压力与目标压力一致时,制动控制单元停止对充风阀和排风阀的控制,从而实现均衡风缸压力的精准控制。
[0087]
如图4所示,图4为本发明中数据采集模块200的结构图,数据采集模块200主要由四个子模块组成:信号接口模块401,用于接收外部模拟信号;信号输入a/d转换模块402,用于将输入的模拟信号转换为数字信号;数据缓存模块403,用于缓存经模拟信号转换的数字信号,最大缓存空间为16k采样点;usb接口模块404,用于连接数据采集模块和寿命预测模块,将缓存模块的数据通过usb传输给寿命预测模块,接口规范为usb3.0接口,接口连接器为usb连接器。
[0088]
如图5所示,图5为本发明中寿命预测模块300的结构图,寿命预测模块300包括特征融合模块501,用于读取csv文件数据,并计算电磁阀的健康指标;寿命预测子模块502,用于通过自回归模型预测电磁阀的剩余使用寿命;寿命预测子模块503,用于通过支持向量回归模型预测电磁阀的剩余使用寿命;寿命预测综合模块504,用于修正混合模型的参数,预
测电磁阀的剩余使用寿命;
[0089]
如图6所示,图6为本发明的流程图,包括:
[0090]
步骤s1:基于电流传感器和压力传感器提取表征电磁阀动作状态的物理指标,包括:
[0091]
时域特征:最大值、均值、平均幅值、方根、幅值、均方值、均方根植、方差、标准差、偏斜度、峭度、波形因子、峰值因子、脉冲因子、裕度指标、峭度指标、偏度指标;
[0092]
频域特征:平均频率、中心频率、均方频率、频率方差、平方根频率、幅值方差、幅值偏度指标、幅值峭度指标、频率标准差、频率歪度、频率峭度、平方根比率;
[0093]
时频域特征,将原始信号通过集成经验模态分解,计算得imf1-imf8能量特征;
[0094]
步骤s2:将提取的特征指标作为自组织映射模型的输入,求得最小量化误差,对最小量化误差进行了db5小波包分解,并将低维趋势项作为健康指标;
[0095]
步骤s3:以求解的健康指标作为模型的输入,分别采用自回归模型和支持向量回归模型对电磁阀的寿命进行预测,通过akaike信息准则确定自回归模型阶数p,同时求得支持向量回归模型的嵌入维数,并对电磁阀的寿命进行预测;
[0096]
所述自回归模型,需要确定模型阶数p和自回归系数αj,j=1,2,
…
,p,通过akaike信息准则确定模型阶数,具体计算方法为:
[0097][0098]
式中,n为样本数,p为阶数,为所拟合模型的残差方差;
[0099]
通过yule-walker方法估计ar模型的自回归系数αj,具体计算方法如下:
[0100][0101]
式中,τ为时间延迟,r
x
(τ)为互相关系数。
[0102]
步骤s4:基于粒子群优化算法混合自回归模型和支持向量回归模型,对权重参数进行调整,实现电磁阀寿命的精准预测。
[0103]
所述自回归模型和支持向量模型预测值分别为y1和y2,组合预测为ω1y1+ω2y2,则预测值与真值之间的偏差表示为
[0104]
zi=ω1y1(i)+ω2y2(i)-xi(i=1,2,
…
n)
[0105]
式中,n为样本数,xi为真实值;
[0106]
由此确定适应度函数为预测误差的平方和为:
[0107][0108]
s.t.ω1+ω2=1
[0109]
ω1≥0,ω2≥0
[0110]
通过粒子群优化算法对权重参数进行调整,实现混合模型对电磁阀剩余使用寿命
的准确预测。
[0111]
综上所述,本发明提供的一种基于多源数据融合的电磁阀寿命预测装置及方法,针对均衡风缸控制模块具有工作机理和故障机制复杂的特点,使得高速电磁阀的退化过程混杂,导致了采用单个传感器对电磁阀剩余使用寿命预测准确度较低。针对该问题,本发明提供一种基于多源数据融合的电磁阀寿命预测方法。首先,利用传感器采集的动态驱动电流信号和压力信号,提取时域、频域和时频域特征指标,采用自组织映射算法将多个特征指标融合,求解得到最小量化误差作为电磁阀的健康指标;其次,以此健康指标和其对应的寿命状态作为自回归模型和支持向量回归模型的输入,分别预测电磁阀剩余使用寿命;最后,将两个模型的预测结果线性混合,利用粒子群优化算法对两个模型的权重参数进行调整,最终实现电磁阀寿命的预测。
[0112]
以上所述仅为本发明的实施例而已,并不用以限制本发明,凡在本发明精神和原则之内,所作任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1