轨道车辆的转向机构、转向架系统及轨道车辆的制作方法
1.本实用新型涉及轨道车辆领域,尤其涉及一种轨道车辆的转向机构、转向架系统及轨道车辆。
背景技术:
2.轨道车辆转弯时,通常利用导向轮与轨道梁之间的接触,弯曲的轨道梁内侧对导向轮施加作用力,使得与导向轮相连的导向架转动,并结合转向机构等部件的传动实现轨道车辆的转弯。车辆直行状态下,导向轮和轨道梁之间存在一定间隙,理想状态是只有在转弯时候导向轮才会接触轨道梁内侧,但实际在转弯完成后,导向轮会和轨道梁分离,但是导向架并不能一定能够及时调整与轨道梁平行,即整车前进方向与轨道梁之间存在一定夹角。如果整车前进方向和轨道梁存在夹角,直线运行中导向轮会先撞击偏向的一边轨道梁,同时使整车产生相反角度转向,前进方向和轨道梁产生了反向的夹角,进而导向轮会撞击到另一边的轨道梁。综上可得整车在直线轨道上运行时候会因为前进方向和轨道梁存在夹角产生左右循环撞击轨道,这样会造成整车的颠簸,影响平稳性。
技术实现要素:
3.本实用新型提供了一种轨道车辆的转向机构、转向架系统及轨道车辆,利于车辆方向调整,提高车辆平稳性。
4.第一方面,本实用新型实施例提供了一种轨道车辆的转向机构,包括导向架、转向臂及弹性件,所述转向臂设有两个且沿所述轨道车辆的宽度方向相对设置在所述导向架上,所述弹性件连接在两个所述转向臂之间;
5.当轨道车辆直行时,所述弹性件位于初始状态;
6.当轨道车辆转向时,所述导向架的转动带动所述转向臂转动,以使所述弹性件发生弹性形变,所述弹性件能够向所述转向臂施加回复力。
7.其中,所述弹性件的两端分别与两个所述转向臂转动连接。
8.其中,所述转向机构还包括安装块,所述安装块设有两个,两个所述安装块分别与两个所述转向臂连接,所述安装块上设有两个相对设置的第一夹持臂,所述弹性件的端部连接在两个所述第一夹持臂之间。
9.其中,两个所述第一夹持臂沿轨道车辆的高度方向相对设置。
10.其中,所述弹性件的两端均设置有球头组件,所述球头组件转动连接在所述安装块的两个所述第一夹持臂之间。其中,所述安装块上还设置有两个相对设置的第二夹持臂,所述转向臂固定在两个所述第二夹持臂之间。
11.其中,所述弹性件为弹簧减振器。
12.第二方面,本实用新型提供了一种轨道车辆的转向架系统,包括上述的转向机构。
13.其中,所述转向架系统还包括转向直拉杆及转向横拉杆,所述转向直拉杆的一端与所述导向架连接,所述转向直拉杆的另一端与其中一个转向臂连接,所述转向横拉杆连
接在两个所述转向臂之间;
14.在所述轨道车辆的长度方向上,所述弹性件位于所述转向直拉杆与所述转向横拉杆之间。
15.第三方面,本实用新型提供了一种轨道车辆,包括前述的轨道车辆的转向架系统。
16.本实用新型实施例提供的转向机构、转向架系统及轨道车辆,在车辆转弯时,导向架的转动会带动转向臂的转动,继而使得弹性件发生弹性形变,利用弹性件的弹性能增加转弯时的缓冲,从而减少振动,同时弹性件能够对转弯后的转向臂和转向臂施加回复力,以使在轨道车辆由弯道进入直行轨道时,转向臂能够带动导向架回复,从而使得转向机构能够及时自动调整方向,保证直线运行中车辆的前进方向能平行于轨道。
附图说明
17.为了更清楚地说明本实用新型的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
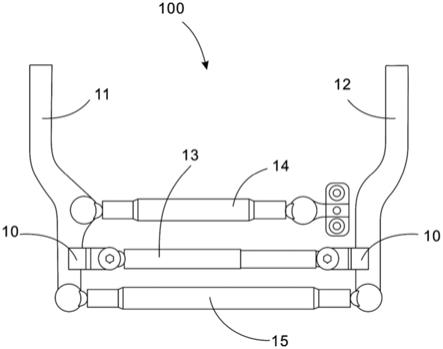
18.图1是本实用新型优选实施例提供的转向架系统的结构示意图;
19.图2是图1中转向架系统的转向机构的示意图;
20.图3是图2中的转向机构的第一转向臂和第二转向臂的示意图;
21.图4是图2中弹性件与安装块的连接示意图。
具体实施方式
22.下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述。
23.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和具体实施方式对本实用新型进行详细描述。需要说明的是,在不冲突的情况下,本实用新型的实施方式及实施方式中的特征可以相互组合。
24.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,所描述的实施方式仅仅是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
25.请参见图1及图2,本实用新型实施例提供的一种轨道车辆,包括轨道车辆的转向架系统,转向架系统包括轨道车辆的导向轮300、转向机构100、及车桥总成(图中未示出)等,导向架200枢转连接在车桥总成的下方,导向轮300 用于引导轨道车辆沿轨道梁行驶,导向架200连接在导向轮300与导向架200 之间。转向机构100连接于车桥总成的转向节叉。本实施例中,导向轮200设置在导向架300的下方,以方便导向轮200与轨道梁相接触,转向机构10与上方的车桥总成连接。
26.进入弯道时,导向架200下方的导向轮300与轨道梁接触,导向轮300带动导向架200受力并相对车桥总成转动,导向架200转动时带动转向机构100 动作,转向机构100带动转向节叉使得走行轮转弯,进而使得轨道车辆沿轨道梁转弯。可以理解的是,导向架200可
以是背景技术中的导向框。
27.结合图2及图3所示,转向机构100包括导向架200、转向臂、及弹性件 13,转向臂设有两个且沿轨道车辆的宽度方向相对设置在导向架200上,弹性件13连接在两个转向臂之间。当轨道车辆直行时,两个转向臂沿轨道车辆的长度方向延伸且弹性件13处于初始状态;当轨道车辆转弯时,导向架200的转动带动转向臂转动,以使弹性件13发生弹性形变,弹性件13能够向转向臂施加回复力。在车辆转弯时,导向架200的转动会带动转向臂的转动,继而使得弹性件13发生弹性形变,利用弹性件13的弹性势能增加转弯时的缓冲,从而减少振动,同时弹性件13能够对转弯后的转向臂施加朝直行位置移动的作用力,以使轨道车辆由弯道进入直行轨道时,转向臂能够带动导向架200回复,从而转向机构100能够及时自动调整方向,保证直线运行中车辆的前进方向能平行于轨道。
28.转向架系统还包括转向直拉杆14和转向横拉杆15。为了便于描述,两个转向臂分别为第一转向臂11和第二转向臂12。转向直拉杆14的一端与第一转向臂11铰接,转向直拉杆14的另一端与导向架200铰接,转向横拉杆15的两端分别与第一转向臂11及第二转向臂12铰接,即转向横拉杆15连接在第一转向臂11及第二转向臂12之间。第一转向臂11沿轨道车辆的长度方向的背离转向横拉杆15的另一端及第二转向臂12沿轨道车辆的长度方向的背离转向横拉杆 15的另一端均用于与车桥总成的转向节叉连接。当导向架200转动时,导向架 200带动转向直拉杆14及转向横拉杆15转动,并带动第一转向臂11和第二转向臂12使转向节叉动作,实现车辆转弯。
29.在其他实施例中,还可以是转向直拉杆14的一端与第二转向臂12铰接。
30.本实施例中,弹性件13的两端分别连接于第一转向臂11和第二转向臂12,利用一个弹性即可同时向第一转向臂11和第二转向臂12施加作用力,结构简单,易于制造和装配。在轨道车辆的长度方向上,弹性件13位于转向直拉杆14 与转向横拉杆15之间,从而可以充分利用转向直拉杆14与转向横拉杆15之间的空间,使得结构紧凑,不会增加整体转向机构100的体积。
31.在一实施例中,在轨道车辆的长度方向上,弹性件13位于转向直拉杆14 与转向横拉杆15的中间。
32.弹性件13的两端分别铰接于第一转向臂11和第二转向臂12,弹性件13优选为弹簧减震器。整车装配时候先调整好弹性件13的位置,即在整车与轨道梁平行时弹性件13不受力呈现原始长度而处于初始状态。在轨道车辆转弯时,第一转向臂11和第二转向臂12动作时,弹性件13的长度被拉长发生形变,在进入直线道时候弹性件13通过自身弹力恢复原长度,从而带动第一转向臂11和第二转向臂12运动至直行位置,即使得第一转向臂11和第二转向臂12摆直,保证了整车行进方向与轨道平行,实现了转弯后进入直道的方向自动调节,减少了在直线道路中的轮轴对轨道冲击次数,增加整车的平稳性。
33.弹性件13的两端分别转动连接于第一转向臂11和第二转向臂12,使得在轨道车辆转弯时,弹性件13可以相对第一转向臂11和第二转向臂12转动,以利于弹性件13的长度变化。弹性件13采用弹簧减震器,使其即可以向第一转向臂11和第二转向臂12提供作用力,还具有更好的减震效果,提高整车的平稳性。此处,在其他实施方式中,弹性件13还可以采用空气弹簧、或拉簧等其他长度变化时能够产生弹力的结构件。
34.结合图3及图4所示,转向臂上固定有安装块10,即转向机构还包括安装块10。本实
施例中,安装块10设有两个,第一转向臂11和第二转向臂12上均固定有安装块10,弹性件13的两端分别连接于两个安装块10。安装块10上设有两个相对设置的第一夹持臂101,弹性件13的端部连接在两个所述第一夹持臂101之间。两个所述第一夹持臂101沿轨道车辆的高度方向相对设置,利用安装块10的两个第一夹持臂101,可以方便弹性件13与第一转向臂11、第二转向臂12之间的连接。安装块10可以通过焊接、螺钉、螺栓等方式与第一转向臂11、第二转向臂12固定连接。此处,在其他实施方式中,弹性件13还可以通过转轴等方式实现与第一转向臂11、第二转向臂12之间的直接连接;也可以仅一个转向臂11、12上设置有安装块10,弹性件13通过其他方式与另一转向臂11、12进行连接。
35.弹性件13的两端均设置有球头组件131,球头组件131连接在安装块10的两个第一夹持臂101之间。利用球头组件131实现弹性件13与安装块10之间的转动连接,以使得弹性件13能够相对第一转向臂11、第二转向臂12转动。此处,弹性件13的端部也可以通过转轴等方式直接与安装块10或转向臂铰接。
36.安装块10上还设置有两个相对设置的第二夹持臂,转向臂11、12固定在两个所述第二夹持臂102之间。利用两个第二夹持臂102可以方便安装块10与转向臂11、12之间的连接,且能够有效提高连接强度。
37.在上述实施方式中,利用一个弹性件13在车辆转弯时同时对两个转向臂施加作用力,此处,在其他实施中,也可以采用两个弹性件分别对两个转向臂施加作用力,例如,两个弹性件分别为第一弹性件和第二弹性件;第一弹性件及第二弹性件沿轨道车辆的长度方向间隔设置,此时,弹性件可以根据连接结构需要设置为拉簧、扭簧、弹簧减震器等具有弹性的结构件。
38.以上是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1