一种带有伸缩臂机构的爬壁机器人的制作方法
[0001]
本发明涉及爬壁机器人技术领域,具体涉及一种带有伸缩臂机构的爬壁机器人。
背景技术:
[0002]
网架、网壳、空间管桁架结构是建筑工程的空间结构形式,在跨度较大的体育建筑、大型会议会展中心、高铁站以及航站楼都有着广泛的应用。传统的空间结构后期涂层维护方式通过人工进行,但是存在除锈效率低、高空作业风险大等问题,随着机器人技术的迅猛发展,爬壁机器人作为特种机器人已经逐渐应用在民用、军事、航天等领域,所以,落后的人工高空危险作业逐渐改为智能机器人一体化操作。
[0003]
中国发明专利cn 102774440b公开了一种适用于爬墙机器人的履带吸盘组件,由若干个结构相同的吸附关节构成的履带,每一个吸附关节包括至少一个常闭型的电磁真空吸盘,电磁真空吸盘由吸盘控制电路控制,电磁真空吸盘适于在得电时处于待吸附状态,失电时处于吸附状态,吸盘控制电路适于在所述履带滚动时,控制处于悬空状态和与幕墙接触的各电磁真空吸盘失电,同时控制即将接触或即将离开幕墙的电磁真空吸盘得电,每个吸盘都为独立真空源,当机器人爬墙时,不会因为遇到瓷砖缝隙而造成整个真空源削弱,同时更不会影响其他吸盘正常工作。
[0004]
但是,由吸附关节构成的履带在沿墙壁向上爬行的时候,吸盘随履带一直移动,长期使用后,吸盘顶部的连接部位容易产生松动,与墙壁吸附的平整度和可靠性下降;同时,爬墙机器人的爬行墙面通常粘附有灰尘等各种杂质,在履带式爬墙机器人的爬壁过程中,墙面上的灰尘等杂质影响履带式爬墙机器人吸盘的吸附性能,使部分吸盘与墙壁之间存在吸附间隙,降低吸附的可靠性,使得爬墙机器人存在掉落的安全隐患;并且,爬墙机器人移动到指定地点进行除锈作业时,产生的铁锈粉尘散落在爬墙机器人周围的墙壁上,既影响爬墙机器人移动返回路线的平整性,影响爬墙机器人移动的安全性,也增加了爬墙机器人的工作负荷。
技术实现要素:
[0005]
针对现有技术的不足,本发明提供了一种带有伸缩臂机构的爬壁机器人,通过2组一号主电动伸缩臂和一号副电动伸缩臂的交替伸展、收缩,2组吸盘交替与墙面吸附、解除吸附、移动,从而完成爬壁机器人在墙壁上的移动,爬壁过程稳定可靠,吸盘只进行吸附和解除吸附的操作,吸盘无需随履带移动,防止吸盘的连接部位松动,使吸盘工作可靠,简化整体装置;通过保持吸盘吸附面的平整和及时清除打磨产生的铁锈粉末,提高爬壁机器人移动路线的平整性,增强爬壁机器人移动的安全性,降低爬壁机器人的工作负荷。
[0006]
为实现以上目的,本发明通过以下技术方案予以实现:
[0007]
一种带有伸缩臂机构的爬壁机器人,包括攀爬装置、执行装置、蓄电池、控制面板、接收器和操作盘,所述攀爬装置包括履带、驱动电机、驱动轮、从动轮、一号主电动伸缩臂、一号副电动伸缩臂、吸盘和下吸风风机,所述驱动电机的输出端与所述驱动轮连接,所述从
动轮通过履带与所述驱动轮连接,所述一号副电动伸缩臂的一端与所述一号主电动伸缩臂固定连接,所述一号副电动伸缩臂的另一端与所述吸盘固定连接,所述吸盘通过下风管与所述下吸风风机连接,所述下风管通过挂钩与所述一号主电动伸缩臂连接,所述执行装置包括二号主电动伸缩臂、二号副电动伸缩臂和打磨盘,所述二号副电动伸缩臂的一端与所述二号主电动伸缩臂固定连接,所述二号副电动伸缩臂的另一端与所述打磨盘固定连接,所述控制面板通过导线与所述蓄电池连接,所述驱动电机、所述下吸风风机、所述一号主电动伸缩臂、所述一号副电动伸缩臂、所述二号主电动伸缩臂、所述二号副电动伸缩臂、所述接收器均与所述控制面板电气连接,所述操作盘安装有收发器,所述收发器与所述接收器信号连接。
[0008]
进一步的,所述攀爬装置包括三号电动伸缩臂和清洁棉,所述三号电动伸缩臂与所述控制面板电气连接,所述清洁棉与所述三号电动伸缩臂固定连接,所述清洁棉在所述三号电动伸缩臂伸展后与所述吸盘的圆环周边抵接。
[0009]
进一步的,所述下风管设有下过滤网、支管和外盖,所述外盖与所述支管螺纹连接。
[0010]
进一步的,所述执行装置包括四号电动伸缩臂、托盘、上吸风风机和吸风腔,所述四号电动伸缩臂、所述上吸风风机均与所述控制面板电性连接,所述四号电动伸缩臂与所述托盘固定连接,所述托盘通过上风管与所述上吸风风机连接。
[0011]
进一步的,所述吸风腔安装有上过滤网、五号电动伸缩臂和毛刷架,所述五号电动伸缩臂与所述控制面板电气连接,所述毛刷架与所述五号电动伸缩臂固定连接,所述毛刷架的毛刷与所述上过滤网抵接。
[0012]
进一步的,所述吸风腔设有出渣通道和出渣盖,所述出渣盖与所述出渣通道滑动连接。
[0013]
进一步的,所述出渣盖设有复位弹簧、外拉环和2个对称的支撑杆,所述出渣通道设有固定环和滑轨,所述复位弹簧与固定环固定连接,所述支撑杆通过滑块与所述滑轨滑动连接。
[0014]
由于采用上述的技术方案,本发明的有益如下:
[0015]
1)本发明的爬壁机器人沿墙壁向上移动时,2组吸盘同时吸附在墙壁上,上方的一号主电动伸缩臂收缩,下方的一号主电动伸缩臂同步伸展,驱动轮和从动轮带动履带向上移动,上方的一号副电动伸缩臂收缩,上方的第1组吸盘解除吸附,下方的一号主电动伸缩臂继续伸展,上方的一号主电动伸缩臂伸展后,上方的一号副电动伸缩臂伸展,上方的第1组吸盘重新与墙面吸附,下方的第2组吸盘解除吸附,下方的一号主电动伸缩臂收缩后,下方的一号副电动伸缩臂伸展,下方的第2组吸盘重新与墙面吸附,如此循环往复,履带沿墙壁向上移动至除锈地点,爬壁过程稳定可靠,吸盘只进行吸附和解除吸附的操作,吸盘无需随履带移动,防止吸盘的连接部位松动,使吸盘工作可靠,简化整体装置;
[0016]
2)上方的一号主电动伸缩臂、一号副电动伸缩臂、吸盘和下方的一号主电动伸缩臂、一号副电动伸缩臂、吸盘循环工作,使爬壁机器人沿墙面向上移动,上方或下方的一号副电动伸缩臂处于收缩状态时,对应的上方或下方的第2组吸盘处于与墙面解除吸附的状态,此时解除吸附状态的吸盘所对应的三号电动伸缩臂完成一次伸展和收缩,在此过程中,清洁棉擦拭吸盘与墙壁的接触面,去除吸盘与墙壁的接触面上的灰尘等杂质,使吸盘的吸
附面保持平整的状态,使吸盘再次与墙壁吸附时保持稳定可靠的吸附状态;
[0017]
3)爬壁机器人停在待除锈位置处,二号副电动伸缩臂伸展,使打磨盘与待除锈位置的墙面相抵触,四号电动伸缩臂伸展,托盘与待除锈位置下方的墙壁相抵触,二号主电动伸缩臂往复伸展和收缩,带动打磨盘上下移动进行打磨除锈,在上吸风风机的作用下,产生的废屑落入托盘,并从上风管进入吸风腔,五号电动伸缩臂伸展、收缩,毛刷架将上过滤网上的废屑刷落至出渣通道,通过外拉环向外滑动出渣盖,便于倒出出渣通道中的废屑集中处理,通过托盘和上吸风风机的共同作用,避免打磨产生的铁锈粉尘落到履带周围的墙壁上,提高爬壁机器人移动返回路线的平整性,增强爬壁机器人移动的安全性,降低爬壁机器人的工作负荷;
[0018]
4)在爬壁的过程中,部分墙壁上的杂质被直接吸进下风管中,通过下过滤网进行拦截,爬壁机器人停止使用时,旋拧外盖打开支管,便于从支管放出拦截的杂质。
附图说明
[0019]
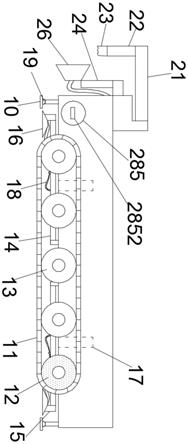
图1是本发明的结构示意图;
[0020]
图2是本发明的俯视图;
[0021]
图3是本发明的结构框图;
[0022]
图4是本发明实施例2中下风管的结构示意图;
[0023]
图5是本发明实施例3中吸风腔的结构示意图;
[0024]
以下是本发明的结构标号:
[0025]
1-攀爬装置,2-执行装置,3-蓄电池,4-控制面板,5-接收器,6-操作盘,11-履带,12-驱动轮,13-从动轮,14-一号主电动伸缩臂,15-一号副电动伸缩臂,16-吸盘,17-下吸风风机,18-下风管,19-三号电动伸缩臂,10-清洁棉,21-二号主电动伸缩臂,22-二号副电动伸缩臂,23-打磨盘,24-四号电动伸缩臂,26-托盘,27-上吸风风机,28-吸风腔,181-下过滤网,182-支管,183-外盖,281-上过滤网,282-五号电动伸缩臂,283-毛刷架,284-出渣通道,285-出渣盖,2841-固定环,2842-滑轨,2851-复位弹簧,2852-外拉环,2853-支撑杆。
具体实施方式
[0026]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0027]
实施例1
[0028]
请参阅图1至图3,本发明提供一种技术方案:一种带有伸缩臂机构的爬壁机器人,包括攀爬装置1、执行装置2、蓄电池3、控制面板4、接收器5和操作盘6,攀爬装置1包括履带11、驱动电机、驱动轮12、从动轮13、一号主电动伸缩臂14、一号副电动伸缩臂15、吸盘16和下吸风风机17,驱动电机的输出端与驱动轮12连接,从动轮13通过履带11与驱动轮12连接,一号副电动伸缩臂15的一端与一号主电动伸缩臂14固定连接,一号副电动伸缩臂15的另一端与吸盘16固定连接,吸盘16通过下风管18与下吸风风机17连接,下风管18通过挂钩与一号主电动伸缩臂14连接,执行装置2包括二号主电动伸缩臂21、二号副电动伸缩臂22和打磨
盘23,二号副电动伸缩臂22的一端与二号主电动伸缩臂21固定连接,二号副电动伸缩臂22的另一端与打磨盘23固定连接,控制面板4通过导线与蓄电池3连接,驱动电机、下吸风风机17、一号主电动伸缩臂14、一号副电动伸缩臂15、二号主电动伸缩臂21、二号副电动伸缩臂22、接收器5均与控制面板4电气连接,操作盘6安装有收发器,收发器与接收器5信号连接。
[0029]
一号主电动伸缩臂14、一号副电动伸缩臂15、吸盘16和下吸风风机17是2组,每组的吸盘16有多个,爬壁时,2组吸盘16同时吸附在墙壁上,上方的一号主电动伸缩臂14收缩,下方的一号主电动伸缩臂14同步伸展,驱动轮12和从动轮13带动履带11向上移动,上方的一号副电动伸缩臂15收缩,上方的第1组的多个吸盘16全部解除吸附,下方的一号主电动伸缩臂14继续伸展,上方的一号主电动伸缩臂14伸展后,上方的一号副电动伸缩臂15伸展,上方的第1组的多个吸盘16重新与墙面吸附,下方的第2组多个吸盘16全部解除吸附,下方的一号主电动伸缩臂14收缩后,下方的一号副电动伸缩臂15伸展,下方的第2组多个吸盘16重新与墙面吸附,如此循环往复,履带11沿墙壁向上移动至除锈地点,操作盘6发出停止移动的指令,接收器5接收到信号后,控制面板4控制上方和下方的一号副电动伸缩臂15、下吸风风机17,使上方和下方的每组吸盘16同时吸附在墙壁上,二号副电动伸缩臂22伸展,使打磨盘23与待除锈位置的墙面相抵触,二号主电动伸缩臂21往复伸展和收缩,带动打磨盘23进行打磨除锈。
[0030]
实施例2
[0031]
请参阅图1和图4,本发明提供一种技术方案:一种带有伸缩臂机构的爬壁机器人,包括攀爬装置1、执行装置2、蓄电池3、控制面板4、接收器5和操作盘6,攀爬装置1包括履带11、驱动电机、驱动轮12、从动轮13、一号主电动伸缩臂14、一号副电动伸缩臂15、吸盘16和下吸风风机,驱动电机的输出端与驱动轮12连接,从动轮13通过履带11与驱动轮12连接,一号副电动伸缩臂15的一端与一号主电动伸缩臂14固定连接,一号副电动伸缩臂15的另一端与吸盘16固定连接,吸盘16通过下风管18与下吸风风机连接,下风管18通过挂钩与一号主电动伸缩臂14连接,执行装置2包括二号主电动伸缩臂21、二号副电动伸缩臂22和打磨盘23,二号副电动伸缩臂22的一端与二号主电动伸缩臂21固定连接,二号副电动伸缩臂22的另一端与打磨盘23固定连接,控制面板4通过导线与蓄电池3连接,驱动电机、下吸风风机17、一号主电动伸缩臂14、一号副电动伸缩臂15、二号主电动伸缩臂21、二号副电动伸缩臂22、接收器5均与控制面板4电气连接,操作盘6安装有收发器,收发器与接收器5信号连接。
[0032]
本实施例中,优选地,攀爬装置1包括三号电动伸缩臂19和清洁棉10,三号电动伸缩臂19与控制面板4电气连接,清洁棉10与三号电动伸缩臂19固定连接,清洁棉10在三号电动伸缩臂19伸展后与吸盘16的圆环周边抵接。上方的一号主电动伸缩臂14、一号副电动伸缩臂15、第1组吸盘16和下方的一号主电动伸缩臂14、一号副电动伸缩臂15、第2组吸盘16循环工作,使爬壁机器人沿墙面向上移动,上方或下方的一号副电动伸缩臂15处于收缩状态时,对应的上方或下方的第2组吸盘16处于与墙面解除吸附的状态,此时解除吸附状态的吸盘16所对应的三号电动伸缩臂19完成一次伸展和收缩,在此过程中,清洁棉10擦拭吸盘16与墙壁的接触面,去除吸盘16与墙壁的接触面上的灰尘等杂质,使吸盘16再次与墙壁吸附时保持稳定可靠的吸附状态。
[0033]
本实施例中,优选地,下风管18设有下过滤网181、支管182和外盖183,外盖183与支管182螺纹连接。部分墙壁上的杂质被直接吸进下风管18中,通过下过滤网181进行拦截,
爬壁机器人停止使用时,旋拧外盖183打开支管182,从支管182放出拦截的杂质。
[0034]
实施例3
[0035]
请参阅图1和图5,本发明提供一种技术方案:一种带有伸缩臂机构的爬壁机器人,包括攀爬装置1、执行装置2、蓄电池3、控制面板4、接收器5和操作盘6,攀爬装置1包括履带11、驱动电机、驱动轮12、从动轮13、一号主电动伸缩臂14、一号副电动伸缩臂15、吸盘16和下吸风风机,驱动电机的输出端与驱动轮12连接,从动轮13通过履带11与驱动轮12连接,一号副电动伸缩臂15的一端与一号主电动伸缩臂14固定连接,一号副电动伸缩臂15的另一端与吸盘16固定连接,吸盘16通过下风管18与下吸风风机连接,下风管18通过挂钩与一号主电动伸缩臂14连接,执行装置2包括二号主电动伸缩臂21、二号副电动伸缩臂22和打磨盘23,二号副电动伸缩臂22的一端与二号主电动伸缩臂21固定连接,二号副电动伸缩臂22的另一端与打磨盘23固定连接,控制面板4通过导线与蓄电池3连接,驱动电机、下吸风风机17、一号主电动伸缩臂14、一号副电动伸缩臂15、二号主电动伸缩臂21、二号副电动伸缩臂22、接收器5均与控制面板4电气连接,操作盘6安装有收发器,收发器与接收器5信号连接。
[0036]
本实施例中,优选地,执行装置2包括四号电动伸缩臂24、托盘26、上吸风风机27和吸风腔28,四号电动伸缩臂24、上吸风风机27均与控制面板4电性连接,四号电动伸缩臂24与托盘26固定连接,托盘26通过上风管与上吸风风机27连接。爬壁机器人停在待除锈位置处,二号副电动伸缩臂22伸展,使打磨盘23与待除锈位置的墙面相抵触,四号电动伸缩臂24伸展,托盘26与待除锈位置下方的墙壁相抵触,二号主电动伸缩臂21往复伸展和收缩,带动打磨盘23上下移动进行打磨除锈,在上吸风风机27的作用下,产生的废屑落入托盘26,并从上风管进入吸风腔28。
[0037]
本实施例中,优选地,吸风腔28安装有上过滤网281、五号电动伸缩臂282和毛刷架283,五号电动伸缩臂282与控制面板4电气连接,毛刷架283与五号电动伸缩臂282固定连接,毛刷架283的毛刷与上过滤网281抵接。五号电动伸缩臂282伸展、收缩,毛刷架283将上过滤网281上的废屑刷落。
[0038]
本实施例中,优选地,吸风腔28设有出渣通道284和出渣盖285,出渣盖285与出渣通道284滑动连接。五号电动伸缩臂282伸展、收缩,毛刷架283将上过滤网281上的废屑刷落至出渣通道284。
[0039]
本实施例中,优选地,出渣盖285设有复位弹簧2851、外拉环2852和2个对称的支撑杆2853,出渣通道284设有固定环2841和滑轨2842,复位弹簧2851与固定环2841固定连接,支撑杆2853通过滑块与滑轨2842滑动连接。五号电动伸缩臂282伸展、收缩,毛刷架283将上过滤网281上的废屑刷落至出渣通道284,通过外拉环2852向外滑动出渣盖285,倒出出渣通道284中的废屑。
[0040]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1