一种串并联拟人机械腿的制作方法
[0001]
本发明涉及机器人领域,更具体的说,尤其涉及一种串并联拟人机械腿。
背景技术:
[0002]
在整个拟人机器人的组成部件当中,机械手与机械腿是其重要的组成部分。其中,机械腿是保持机器人身体平衡的关键部位,是机器人的主要载体。因此,机械腿的研究是机器人领域中的重要内容,对机器人行走控制起着至关重要的作用。
[0003]
各国已相继推出了各种类型的拟人机器人,这些机器人的腿部大部分采用了串联机构或者并联机构。串联结构的机器腿虽然各关节活动范围大,但存在承载能力小、运动惯量大等不足,如日本的hrp-5p机器人、wabian-2机器人,韩国的hubo机器人。并联机构承载能力强,但其体积庞大、运动范围小、结构非拟人化,如日本的wl-16riv机器人、意大利的larmbot机器人。串并混联机构能很好结合以上两类机构的优点。
[0004]
目前对串并混联机械腿的研制较少,已有的混联腿只是在单个并联机构上串联一个电机或者简单地串联两个并联机构,其膝关节要么不存在,要么就是仅用单个旋转电机代替。这些机构在行走功能上并不符合人体的运动方式,运动不灵活,其驱动方式多采用电机驱动,承载能力较低,无法满足在不同环境下稳定行走的需求。
技术实现要素:
[0005]
本发明的目的在于解决现有的混联机械腿行走功能上不符合人体运动方式、运动不灵活以及驱动大多采用电机导致的承载能力低、无法满足不同环境稳定行走需求的问题,提出了一种串并联拟人机械腿,该机械腿具有较大的运动空间,具有结构紧凑、精度高、刚度高、装配工艺良好等优点,符合人体腿部行走方式,能够实现不同工作环境的稳定行走的需求。
[0006]
本发明通过以下技术方案来实现上述目的:一种串并联拟人机械腿,包括二自由度髋关节模块、二自由度膝关节模块、二自由度踝关节模块,所述二自由度髋关节模块连接二自由度膝关节模块,二自由度膝关节模块连接二自由度踝关节模块,整个机械腿通过二自由度髋关节模块、二自由度膝关节模块和二自由度踝关节模块构成六自由度串并混联机构;
[0007]
所述二自由度髋关节模块包括静平台总成、动平台总成和三条支链总成,所述静平台总成与动平台总成通过三条支链总成连接;三条支链总成分别为第一支链总成、第二支链总成和第三支链总成,所述静平台总成包括基座固定板、推杆筒、基座中间件和第一阶梯轴,所述推杆筒设置有两个,且两个推杆筒均竖直固定在基座固定板的一侧,两个推杆筒的轴心线垂直于基座固定板设置,所述基座固定板中部开设有光孔,基座中间件顶部设置有竖直设置的定位杆,基座中间件上的定位杆穿过穿过基座固定板上光孔,基座中间件通过内六角螺栓固定在所述基座固定板上;所述基座中间件整体呈倒u型,基座中间件的两条侧边的耳部开设有定位孔,两个第一阶梯轴分别穿过基座中间件上的两个定位孔且两个第
一阶梯轴固定在基座中间件上,两个第一阶梯轴的轴心线与基座固定板的上表面相平行;
[0008]
所述动平台总成包括第五连接件、第二阶梯轴、立板、垫板和关节轴承,所述关节轴承内嵌在所述垫板的中部,垫板的左右两侧分别设置有一块竖直设置的立板,两块立板平行设置且对称设置在关节轴承的两侧,两个第二阶梯轴分别固定在两块立板的上端,其中一个第二阶梯轴远离另一个第二阶梯轴的一侧固定有第五连接件,所述第五连接件呈轴状,第五连接件和两个第二阶梯轴的轴心线在同一条直线上且第五连接件和两个第二阶梯轴的轴心线垂直于立板设置;
[0009]
所述第一支链总成包括第一推杆和第一连接件,所述第一推杆的上端设置在静平台总成的一个推杆筒内,第一推杆的下端设置有轴套;所述第一连接件的一端设置有第一连接阶梯轴,第一连接件的另一端设置有第一连接套筒,第一推杆下端的轴套与第一连接件一端的第一连接阶梯轴通过轴承连接,所述动平台总成的第五连接件套装在所述第一连接件另一端的第一连接套筒内;
[0010]
所述第二支链总成包括包括第二推杆、第二连接件、第三连接件和第四连接件,所述第二推杆的上端设置在静平台总成的另一个推杆筒内,第二推杆的下端设置有轴套;所述第二连接件的一端设置有第二连接阶梯轴,第二连接件的另一端设置有第二连接套筒,第二推杆下端的轴套与第二连接件一端的第二连接阶梯轴通过轴承连接,所述第三连接件套装在第二连接件另一端的第二连接套筒内;第三连接件的一端固定连接在l型的第四连接件的一侧侧边的端部,第四连接件的另一条侧边的端部与动平台总成的关节轴承固定连接;
[0011]
所述第三支链总成包括方形环件、圆形轴承座和圆形配合轴承,方形环件的剖面呈正方形,方形环件的四个侧面的中部均固定有一个圆形轴承座,每个圆形轴承座内部设置有一个圆形配合轴承;所述静平台总成的两个第一阶梯轴与其中两个相对设置的圆形配合轴承配合连接;所述动平台总成的两个第二阶梯轴与另外两个相对设置圆形配合轴承配合连接。
[0012]
所述二自由度膝关节模块包括部分解耦型二自由度机构、第一圆柱件和旋转电机,所述部分解耦型二自由度机构包括第一中间板、第二圆柱件、第六连接件、第三推杆、三角连接件、连杆、第七连接件和定轴,所述旋转电机固定在第一圆柱件内部,第一圆柱件的上端面与动平台总成的垫板固定连接,所述旋转电机的输出轴连接所述第一中间板,旋转电机工作时驱动所述第一中间板转动;所述第二圆柱件的上端固定在所述第一中间板的底面上,第二圆柱件的下端与第六连接件固定连接,所述三角连接件的一个角铰接在所述第六连接件上,第三推杆的活动端连接在三角连接件的第二个角上,第三推杆的固定端安装在第一中间板上,第三推杆工作时推动三角连接件绕着三角连接件与第三推杆的铰接轴转动;所述第七连接件铰接在所述三角连接件的第三个角上,所述连杆的一端铰接在第六连接件上,连杆的另一端通过定轴铰接在所述第七连接件上;
[0013]
所述二自由度踝关节模块包括静平台总成、动平台总成、三条支链总成、第三圆柱件和脚掌,二自由度踝关节模块的静平台总成、动平台总成和三条支链总成与二自由度髋关节模块的静平台总成、动平台总成和三条支链总成的结构及连接方式完全相同,用于增加二自由度踝关节模块长度的第三圆柱件设置在静平台总成的基座固定板和基座中间件之间,用于行走的脚掌设置在动平台总成的垫板底部。
[0014]
进一步的,所述基座固定板整体呈凸型,基座固定板上靠近推杆筒的一侧表面上开有一道铣槽,两根推杆筒通过铣槽在基座固定板上定位以保证两根推杆筒的平行。
[0015]
进一步的,所述推杆筒包括推杆筒壁和推杆筒固定板,所述推杆筒壁固定在推杆筒固定板上,推杆筒固定板的厚度与基座固定板开设的铣槽宽度相等,推杆筒固定板插接在铣槽内实现推杆筒固定板的定位,推杆筒固定板通过内六角螺钉固定在基座固定板的铣槽中。
[0016]
进一步的,所述第一阶梯轴端部设置有用于固定的法兰盘,第一阶梯轴的法兰盘与基座中间件的侧边的耳部通过内六角螺栓固定连接。
[0017]
进一步的,所述第一推杆和第二推杆分别与静平台总成的两个推杆筒组成推杆机构,推杆机构运动时驱动所述动平台总成的运动。
[0018]
进一步的,所述第四连接件与关节轴承的连接构成转动副。
[0019]
进一步的,所述基座中间件的u型底部较厚,在基座中间件的底部开设有贯穿的通孔以减轻基座中间件的重量。
[0020]
进一步的,所述垫板上表面的左右两侧分别开设有一条铣槽且两条铣槽平行设置,两块立板的下端内嵌在两条铣槽内,两块立板与垫板通过内六角螺栓固定连接。垫板上的两条铣槽用于两块立板的定位,保证两块立板的平行。
[0021]
进一步的,所述第一阶梯轴、第二阶梯轴、第四连接件和关节轴的轴心线始终相较于一点。
[0022]
进一步的,所述三角连接件和连杆均设置有左右对称的一对,第六连接件和第七连接件均呈u型设置。三角连接件的三角个作为连接部位,三个角分别以铰接的方式连接第六连接件的两个侧板、第七连接件的两个侧板和第三推杆的输出端。第三推杆工作时推动三角连接件转动,三角连接件转动时推动第七连接件转动,由于第七连接件铰接在连杆上,所述第七连接件的转动时绕着连杆与第六连接件的铰接轴转动,从而限制第七连接件的运动范围。
[0023]
本发明的有益效果在于:
[0024]
1、本发明包括二自由度髋关节模块、二自由度膝关节模块、二自由度踝关节模块,整个机械腿通过二自由度髋关节模块、二自由度膝关节模块和二自由度踝关节模块构成六自由度串并混联机构,符合人体运动自由度,能够实现机械腿在不同环境下的稳定性走。
[0025]
2、本发明机械腿中的二自由度髋关节模块与二自由度踝关节模块采用含恰约束支链的部分解耦型二自由度机构,具有两个转动自由度,整体机构结构紧凑,加工与装配工艺良好,其工作空间符合各关节的运动范围。
[0026]
3、由于并联机构具有解耦性,本发明的运动学正反解容易,运动范围广,控制简单。
[0027]
4、本发明的二自由度膝关节模块不是只靠单个旋转电机来实现关节的单自由度旋转,而是采用了变瞬心四杆机构,这不仅符合人体的膝关节的运动规律,还可以有效减小能量的损失。
附图说明
[0028]
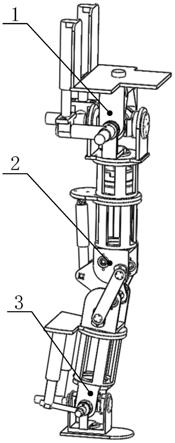
图1是本发明的一种串并联拟人机械腿的整体结构示意图。
[0029]
图2是本发明的二自由度髋关节模块的结构示意图。
[0030]
图3是本发明的静平台总成的结构示意图。
[0031]
图4是本发明的第一支链总成的结构示意图。
[0032]
图5是本发明的第二支链总成的结构示意图。
[0033]
图6是本发明的第三支链总成的结构示意图。
[0034]
图7是本发明的动平台总成的结构示意图。
[0035]
图8是本发明的二自由度膝关节模块的结构示意图。
[0036]
图9是本发明的二自由度踝关节模块的结构示意图。
[0037]
图中,1-二自由度髋关节模块、2-二自由度膝关节模块、3-二自由度踝关节模块、11-静平台总成、12-第二支链总成、13-动平台总成、14-第一支链总成、15-第三支链总成、21-第一中间板、22-第二圆柱件、23-第六连接件、24-连杆、25-定轴、26-第七连接件、27-三角连接件、28-第三推杆、29-第一圆柱件、31-脚掌、32-第三圆柱件、111-基座固定板、112-推杆筒、113-基座中间件、114-第一阶梯轴、121-第二推杆、122-第二连接件、123-第三连接件、124-第四连接件、131-第五连接件、132-第二阶梯轴、133-立板、134-垫板、135-关节轴承、210-旋转电机、141-第一推杆、142-第一连接件、151-方形环件、152-圆形轴承座、153-圆形配合轴承。
具体实施方式
[0038]
下面结合附图对本发明作进一步说明:
[0039]
如图1~9所示,一种串并联拟人机械腿,包括二自由度髋关节模块1、二自由度膝关节模块2、二自由度踝关节模块3,所述二自由度髋关节模块1连接二自由度膝关节模块2,二自由度膝关节模块2连接二自由度踝关节模块3,整个机械腿通过二自由度髋关节模块1、二自由度膝关节模块2和二自由度踝关节模块3构成六自由度串并混联机构。二自由度髋关节模块1和二自由度踝关节模块3具有两个转动自由度,二自由度膝关节模块2具有旋转和摆动两个自由度。
[0040]
所述二自由度髋关节模块1包括静平台总成11、动平台总成13和三条支链总成,所述静平台总成11与动平台总成13通过三条支链总成连接;三条支链总成分别为第一支链总成14、第二支链总成12和第三支链总成15,所述静平台总成11包括基座固定板111、推杆筒112、基座中间件113和第一阶梯轴114,所述推杆筒112设置有两个,且两个推杆筒112均竖直固定在基座固定板111的一侧,两个推杆筒112的轴心线垂直于基座固定板111设置,所述基座固定板111中部开设有光孔,基座中间件113顶部设置有竖直设置的定位杆,基座中间件113上的定位杆穿过穿过基座固定板111上光孔,基座中间件113通过内六角螺栓固定在所述基座固定板111上;所述基座中间件113整体呈倒u型,基座中间件113的两条侧边的耳部开设有定位孔,两个第一阶梯轴114分别穿过基座中间件113上的两个定位孔且两个第一阶梯轴114固定在基座中间件113上,两个第一阶梯轴114的轴心线与基座固定板111的上表面相平行。
[0041]
所述动平台总成13包括第五连接件131、第二阶梯轴132、立板133、垫板134和关节轴承135,所述关节轴承135内嵌在所述垫板134的中部,垫板134的左右两侧分别设置有一块竖直设置的立板133,两块立板133平行设置且对称设置在关节轴承135的两侧,两个第二
阶梯轴132分别固定在两块立板133的上端,其中一个第二阶梯轴132远离另一个第二阶梯轴132的一侧固定有第五连接件131,所述第五连接件131呈轴状,第五连接件131和两个第二阶梯轴132的轴心线在同一条直线上且第五连接件131和两个第二阶梯轴132的轴心线垂直于立板133设置。
[0042]
所述第一支链总成14包括第一推杆141和第一连接件142,所述第一推杆141的上端设置在静平台总成11的一个推杆筒112内,第一推杆141的下端设置有轴套;所述第一连接件142的一端设置有第一连接阶梯轴,第一连接件142的另一端设置有第一连接套筒,第一推杆141下端的轴套与第一连接件142一端的第一连接阶梯轴通过轴承连接,所述动平台总成13的第五连接件131套装在所述第一连接件142另一端的第一连接套筒内。
[0043]
所述第二支链总成12包括包括第二推杆121、第二连接件122、第三连接件123和第四连接件124,所述第二推杆121的上端设置在静平台总成11的另一个推杆筒112内,第二推杆121的下端设置有轴套;所述第二连接件122的一端设置有第二连接阶梯轴,第二连接件122的另一端设置有第二连接套筒,第二推杆121下端的轴套与第二连接件122一端的第二连接阶梯轴通过轴承连接,所述第三连接件123套装在第二连接件122另一端的第二连接套筒内;第三连接件123的一端固定连接在l型的第四连接件124的一侧侧边的端部,第四连接件124的另一条侧边的端部与动平台总成13的关节轴承135固定连接。
[0044]
所述第三支链总成15包括方形环件151、圆形轴承座152和圆形配合轴承153,方形环件151的剖面呈正方形,方形环件151的四个侧面的中部均固定有一个圆形轴承座152,每个圆形轴承座152内部设置有一个圆形配合轴承153;所述静平台总成11的两个第一阶梯轴114与其中两个相对设置的圆形配合轴承153配合连接;所述动平台总成13的两个第二阶梯轴132与另外两个相对设置圆形配合轴承153配合连接。
[0045]
所述二自由度膝关节模块2包括部分解耦型二自由度机构、第一圆柱件29和旋转电机210,所述部分解耦型二自由度机构包括第一中间板21、第二圆柱件22、第六连接件23、第三推杆28、三角连接件27、连杆24、第七连接件26和定轴25,所述旋转电机210固定在第一圆柱件29内部,第一圆柱件29的上端面与动平台总成13的垫板134固定连接,所述旋转电机210的输出轴连接所述第一中间板21,旋转电机210工作时驱动所述第一中间板21转动;所述第二圆柱件22的上端固定在所述第一中间板21的底面上,第二圆柱件22的下端与第六连接件23固定连接,所述三角连接件27的一个角铰接在所述第六连接件23上,第三推杆28的活动端连接在三角连接件27的第二个角上,第三推杆28的固定端安装在第一中间板21上,第三推杆28工作时推动三角连接件27绕着三角连接件27与第三推杆28的铰接轴转动;所述第七连接件26铰接在所述三角连接件27的第三个角上,所述连杆24的一端铰接在第六连接件23上,连杆24的另一端通过定轴25铰接在所述第七连接件26上。所述三角连接件27和连杆24均设置有左右对称的一对,第六连接件23和第七连接件26均呈u型设置。
[0046]
所述二自由度踝关节模块3包括静平台总成、动平台总成、三条支链总成、第三圆柱件32和脚掌31,二自由度踝关节模块3的静平台总成、动平台总成和三条支链总成与二自由度髋关节模块1的静平台总成11、动平台总成13和三条支链总成的结构及连接方式完全相同,用于增加二自由度踝关节模块3长度的第三圆柱件32设置在静平台总成11的基座固定板111和基座中间件113之间,用于行走的脚掌31设置在动平台总成13的垫板134底部。
[0047]
所述基座固定板111整体呈凸型,基座固定板111上靠近推杆筒112的一侧表面上
开有一道铣槽,两根推杆筒112通过铣槽在基座固定板111上定位以保证两根推杆筒112的平行。
[0048]
所述推杆筒112包括推杆筒壁和推杆筒固定板,所述推杆筒壁固定在推杆筒固定板上,推杆筒固定板的厚度与基座固定板111开设的铣槽宽度相等,推杆筒固定板插接在铣槽内实现推杆筒固定板的定位,推杆筒固定板通过内六角螺钉固定在基座固定板111的铣槽中。
[0049]
所述第一阶梯轴114端部设置有用于固定的法兰盘,第一阶梯轴114的法兰盘与基座中间件113的侧边的耳部通过内六角螺栓固定连接。
[0050]
所述第一推杆141和第二推杆121分别与静平台总成11的两个推杆筒112组成推杆机构,推杆机构运动时驱动所述动平台总成13的运动。
[0051]
所述第四连接件124与关节轴承135的连接构成转动副。
[0052]
所述基座中间件113的u型底部较厚,在基座中间件113的底部开设有贯穿的通孔以减轻基座中间件113的重量。
[0053]
所述垫板上表面的左右两侧分别开设有一条铣槽且两条铣槽平行设置,两块立板133的下端内嵌在两条铣槽内,两块立板133与垫板通过内六角螺栓固定连接。
[0054]
所述第一阶梯轴114、第二阶梯轴132、第四连接件124和关节轴的轴心线始终相较于一点。
[0055]
本发明混联机构中的并联机构为含恰约束支链的部分解耦型并联机构,不仅结构紧凑,加工与装配工艺良好,还使得动平台能够具有两个转动自由度,彼此由互不干涉的两个驱动单元所驱动,使得机构的两个转动具有部分解耦性,运动范围广,控制简单。该膝关节采用了变瞬心四杆机构,不仅符合人体的膝关节的运动规律,还可以有效较小能量的损失。
[0056]
上述实施例只是本发明的较佳实施例,并不是对本发明技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本发明专利的权利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1