一种矿山自主三维测绘无人车的制作方法
1.本实用新型涉及技术领域,具体为一种矿山自主三维测绘无人车。
背景技术:
2.矿井测量工作是在地质勘探和矿井开采的过程非常重要的工作环节,对于矿井生产工作有着指导性作用。
3.矿井测绘作业具有以下特点:
4.1.工作环境恶劣。由于矿井测量工作环境的限制,大部分矿井地理位置偏僻,交通及补给不便,工作人员在进山时还需要携带大量的物资设备,环境、气候等不可控因素都会影响矿井测量的准确性及精度。此外矿井测绘精度与仪器设备与工作人员的专业素质相关。
5.2.工作强度高:由于工作量很大,单个工作人员无法在短时间内采集完整的数据,也无法保证采集数据的准确性,需要多次测量,过大的工作强度在一定程度上造成矿井测量的困难。
6.目前在矿井测绘领域,主要采用人工测绘的方式进行作业,例如使用电子经纬仪、全站型仪器和gps接收机等进行测绘,而近几年三维激光雷达作为一种非接触式测量技术也开始在矿井测绘中使用,例如利用网络rtk技术对某露天矿井进行了控制测量,并采用三维激光扫描技术定期监测矿井采剥面,通过点云数据处理,构建了采剥面的三维地质模型,经过与各时期的模型进行叠加分析,实现了对矿井储量的动态监测;采用三维激光扫描技术对丹东某露天矿进行了资源储量的动态试验性监测,认为该技术无论在观测效率,还是在观测精度方面均优于传统观测方法;采用三维激光扫描技术对许家采石场的资源储量进行了动态监测,认为采用该技术进行观测可有效解决复杂地形条件下的储量管理问题,相对于传统观测方法有一定的优势。
7.上述矿井测绘技术具有以下缺点;
8.1.人工测绘方式工作强度大,效率低,高精度测绘对于仪器设备的性能及工作人员的专业素质要求较高。
9.2.人工测绘方式测量的结果一般为平面图,信息归档不全,所展示的数据不够直观,测绘精度也存在一定的局限性。
10.3.目前所采用的三维激光测绘设备仍需要人工操作,在测绘作业中需要较长的工时。
技术实现要素:
11.(一)解决的技术问题
12.针对现有技术的不足,本实用新型提供了一种高精度建图,稳定运行的矿山自主三维测绘无人车。
13.(二)技术方案
14.为实现上述目的,本实用新型提供如下技术方案:一种矿山自主三维测绘无人车,包括车身、铝制型材支架、激光雷达以及移动机构,所述车身内设有微型主机、控制器、开关电源、后扣件、遥控接收机、驱动板、锂电池以及前扣件,所述车身前部设有前挡板,所述车身后部设有后挡板,所述微型主机及控制器固定在车身内部,二者之间设有通讯线进行连接,所述开关电源安装在车身尾部,且设有内六角扳手旋转接通或切断电源,所述遥控接收机固定在尾部,接收遥控信号,所述驱动板紧靠开关电源,所述锂电池用于供电,安装于车身内部,所述前扣件及后扣件分别位于车身前挡板及后挡板,所述车身顶部设有顶部盖板,且与后扣件以及前扣件连接,用于上锁固定顶部盖板,所述铝制型材支架安装在顶部盖板的顶部,所述移动机构包括越野轮胎,所述越野轮胎共计四个安装在车身的底部,用于带动车身运动,所述激光雷达与微型主机及控制器连接,所述激光雷达共计四部安装于铝制型材支架上,且分别朝向不同角度,所述激光雷达进行测绘及路径规划并导航,所述控制器与直流电机连接智能驱动直流电机运转。
15.为了提高激光雷达使用的稳定性,本实用新型改进有,所述激光雷达为固态激光雷达,所述激光雷达底部设有激光雷达底座与铝制型材支架连接。
16.为了提高激光雷达的探测范围,本实用新型改进有,所述激光雷达包括顶部激光雷达、左侧朝向激光雷达、右侧朝向激光雷达以及底部朝向激光雷达,且方向夹角为六十度。
17.为了提高小车的移动效果,本实用新型改进有,所述移动机构还包括直流电机、减速器、侧板、橡胶密封圈、轮毂法兰、减速器输出轴以及减速器外连接片,所述直流电机与减速器相连接,固定于侧板上,所述侧板与减速器外连接片之间的缝隙由橡胶密封圈密封,所述减速器输出轴与轮毂法兰之间配合转动输出动力,所述越野轮胎通过螺栓与轮毂法兰之间链接。
18.为了提高铝激光雷达安装的稳定性,本实用新型改进有,所述激光雷达与铝制型材支架之间设有固定角码连接。
19.为了提高微型主机与控制器的通讯效果,本实用新型改进有,所述通讯线为rs232串口通讯线。
20.(三)有益效果
21.与现有技术相比,本实用新型提供了一种矿山自主三维测绘无人车,具备以下有益效果:
22.本实用新型通过在小车上搭载高精度建图的激光雷达,实现在矿井环境下的快速的三维场景重建及测绘工作,并能通过激光雷达实现自主导航,规划路线,实现自主完成测绘任务,与传统人工测绘方式相比,大大减小了工作人员的工作强度,节省时间,缩短测绘工程工期,节约企业成本。
附图说明
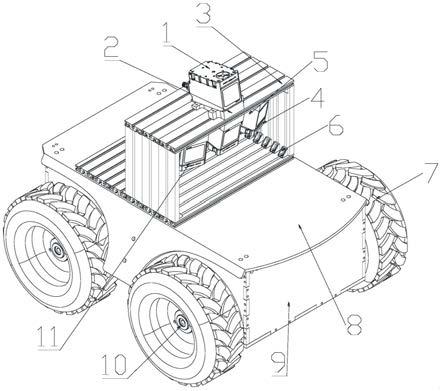
23.图1为本实用新型外部结构示意图;
24.图2为本实用新型内部结构示意图;
25.图3为本实用新型外部局部放大结构示意图;
26.图4为本实用新型侧板结构示意图;
27.图5为本实用新型侧板结构示意图;
28.图6为本实用新型slam算法伪代码示意图;
29.图中:1、顶部激光雷达;2、激光雷达底座;3、铝制型材支架;4、左侧朝向激光雷达;5、底部朝向激光雷达;6、固定角码;7、越野轮胎;8、顶部盖板;9、前挡板;10、轮胎固定法兰;11、右侧朝向激光雷达;12、微型主机;13、控制器;14、开关电源;15、扣件;16、遥控接收机;17、驱动板;18、锂电池;19、前扣件;20、直流电机;21、减速器;22、侧板;23、橡胶密封圈;24、轮毂法兰;25、减速箱输出轴;26、减速器外连接片;
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.请参阅图1
‑
6,本实用新型为一种矿山自主三维测绘无人车,包括车身、铝制型材支架3、激光雷达以及移动机构,所述车身内设有微型主机12、控制器13、开关电源14、后扣件15、遥控接收机16、驱动板17、锂电池18以及前扣件19,所述车身前部设有前挡板9,所述车身后部设有后挡板,所述微型主机12及控制器13固定在车身内部,二者之间设有通讯线进行连接,所述开关电源14安装在车身尾部,且设有内六角扳手旋转接通或切断电源,所述遥控接收机16固定在尾部,接收遥控信号,所述驱动板17紧靠开关电源14,所述锂电池18用于供电,安装于车身内部,所述前扣件19及后扣件15分别位于车身前挡板9及后挡板,所述车身顶部设有顶部盖板8,且与后扣件15以及前扣件19连接,用于上锁固定顶部盖板8,所述铝制型材支架3安装在顶部盖板8的顶部,所述移动机构包括越野轮胎7,所述越野轮胎7共计四个安装在车身的底部,用于带动车身运动,所述激光雷达与微型主机12及控制器13连接,所述激光雷达共计四部安装于铝制型材支架3上,且分别朝向不同角度,所述激光雷达进行测绘及路径规划并导航,所述控制器13与直流电机20连接智能驱动直流电机20运转。
32.本实施例中,所述激光雷达为固态激光雷达,所述激光雷达底部设有激光雷达底座2与铝制型材支架3连接,既而提高激光雷达使用的稳定性。
33.本实施例中,所述激光雷达包括顶部激光雷达1、左侧朝向激光雷达4、右侧朝向激光雷达11以及底部朝向激光雷达5,且方向夹角为六十度,既而提高激光雷达的探测范围。
34.本实施例中,所述移动机构还包括直流电机20、减速器21、侧板22、橡胶密封圈23、轮毂法兰24、减速器输出轴25以及减速器外连接片26,所述直流电机20与减速器21相连接,固定于侧板22上,所述侧板22与减速器外连接片26之间的缝隙由橡胶密封圈23密封,所述减速器输出轴25与轮毂法兰24之间配合转动输出动力,所述越野轮胎7通过螺栓与轮毂法兰24之间链接,既而提高车身的移动的稳定效果。
35.本实施例中,所述激光雷达与铝制型材支架3之间设有固定角码6连接,既而提高激光雷达安装在铝制型材支架3上的稳定性。
36.本实施例中,所述通讯线为rs232串口通讯线,既而提高微型主机12与控制器13的通讯效果。
37.综上所述,该矿山自主三维测绘无人车,在使用时,本实用新型进入自主导航模式
时,四部激光雷达均通过固定角码6固定在铝制型材支架3上,为了获取最佳视场,顶部激光雷达1安装在倾角为10度的激光雷达底座2上,并使用船型螺母锁具固定于铝制型材支架3上,左侧朝向激光雷达4,底部朝向激光雷达5,右侧朝向激光雷达11,其探测方向分别朝向车体左侧六十度,居中朝下倾斜十度,朝向车体右侧六十度方向,锂电池18为激光雷达及微型主机12供电并将数据传输至微型主机12进行处理,执行slam算法程序;微型主机12在开关电源14的控制下与控制器13通讯,并输出信号至驱动板17,驱动板17在接收到信号后,控制直流电机20的正反转及加速减速动作,配合减速器21,可以增大直流电机20扭矩,提高车身的负载能力,减速器输出轴25与轮毂法兰24配合,越野轮胎7通过螺栓与轮毂法兰24固定在一起,车身的前进后退是通过前后四个直流电机20的正转反转实现的,而转弯是通过车身左右两侧越野轮胎7差速转动所实现,而在使用手动控制模式时,通过遥控器安装在车身内部的接收机,手动模式下直接控制小车的前进后退等动作,从而满足自主测绘的工作条件。
38.本实用新型通过安装在铝制型材支架3上的四部固态激光雷达采集当前工作环境下的点云数据,并将点云数据传输给微型主机12实时执行slam算法,slam算法具体而言包括:点云数据中对点的选择,通过计算在front
‑
left
‑
up(flu)坐标系激光雷达点云p=[x,y,z]的特征;
[0039]
雷达测距信息:
[0040]
激光偏转角φ为激光射线与x轴之间夹角:
[0041]
入射角θ是激光与被测点周围的局部平面夹角:
[0042]
为了提高定位建图的准确性,剔除以下特征点:
[0043]
1接近fov视场边缘的点(e.g.φ
(p)
≥17
°
),在这样的区域中e.g.φ
(p)
≥17
°
,扫描轨迹具有较大的曲率,从而导致特征提取的可靠性降低;
[0044]
2.强度太大或太小的点(e.g.i
(p)
≤7
×
10
‑3,i
(p)
≤1
×
10
‑1livox mid40),这是因为强度直接表示接收到的激光信号的强度,信号强度过大通常会导致接收电路饱和或失真,并降低测距精度。另一方面,信号强度太小通常会导致信号噪声比降低,这也会降低测距精度;
[0045]
3.入射角度接近π或者0的点(e.g.θ(p)≤5
°
,,θ(p)≥175
°
,livox mid40),这是因为由激光束的非零发散角引起的激光光斑将大大延长,结果,测量范围是大点而不是特定点所覆盖区域的平均值。
[0046]
4.隐藏在物体后面的点,对点云数据中的点进行初步筛选,提取其中最有价值的数据点,排除干扰,有利于提高定位及建图精度。
[0047]
本实施例包括提取特征,选择点后,我们执行特征提取以从“好点”中提取特征。我们通过计算候选点的局部平滑度来提取平面和边缘特征,此外,为了减轻由于有限的fov和点选择导致的少量特征而导致的匹配退化,我们将lidar反射率用作4维测量。如果3d点的反射率与附近点有很大不同,我们将其视为边缘特征点(由于材料变化,反射率中的边缘,
与由于形状变化而导致的几何形状中的边缘相反)。在某些退化情况下,例如面对带有关闭的门和窗的墙壁,这种特征点有利于进行特征提取。
[0048]
本实施例包括迭代位姿优化,由于固态激光雷达所采用的非重复扫描方式,即使在静态环境下,所扫描的轨迹与特征点也不同于上一帧,无法利用两帧之间提取的点云特征进行匹配,因此在我们的工作中使用迭代位姿优化来估计激光雷达的位姿,通过该方法可以实现20hz的实时建图。
[0049]
本实施例包括边缘之间残差,在当前帧和地图中分别将和表示所有边缘特征的集合对于中的每个点,我们发现距最近的5个点,为了提高搜索速度,我们构建了的kd树。此外,一旦接收到最后的注册帧/子帧,kd
‑
树就由另一个并行线程构建。这样,当接收到新帧时,kd树立即可用。
[0050]
令pl为当前帧(第k帧)的中的一个点。注意到中的点位于本地lidar框架中,而点已在全局地图中注册,要找到中的最近点,我们需要通过以下变换将其投影到全局地图中。
[0051]
p
w
=r
k
p
l
+t
k
[0052]
其中(rk;tk)是当前帧的最后一点被采样时的lidar姿态,需要通过姿态优化来确定。在这里,我们使用框架中最后一点的lidar姿态来表示整个框架的姿态,并使用该姿态将该框架中的所有点投影到全局地图上。还要注意,当前帧中的最后一点本质上是下一帧中的第一个点。
[0053]
令p
i
表示ε
m
的p
w
的第i个最近点,为了确保p
i
确实在一条线上,我们计算p的m个最近点形成的均值μ和协方差矩阵∑,我们在工作中将m设置为5。如果∑的最大特征值比第二个最大特征值大三倍,则可以确保p
w
的最近点形成p
w
所在的线,然后计算对应的点对边残差,然后将其添加到姿态优化中。
[0054][0055]
本实施例还包括平面对平面残差:与边缘特征点相似,对于当前帧的平面特征集中的一个点,我们在地图的平面特征集和找到5个最近的点。通过计算它们的协方差矩阵∑,我们还确保这5个最近的点确实在同一平面内。如果∑的最小特征值比第二个最小特征值小三倍,我们计算当前帧中的平面点到同一平面中5个点形成的平面的距离,如下所示,并将此残差加到优化。
[0056][0057]
本实例还包括帧内运动补偿:如前所述,随着lidar运动不断进行,在不同姿势的不同时间(即电机模糊)对3d点进行采样,为了消除运动模糊的影响,我们提出了以下两种方法:
[0058]
1)分段处理
[0059]
消除运动模糊影响的一种简单而有效的方法是分段处理,我们将输入帧分为三个连续的子帧,然后将这三个子帧分别匹配到迄今雷达积的同一地图,在每个子帧的扫描匹配期间,使用该子帧终点处的lidar姿态将其所有点投影到全局地图,这样,每个子帧的时间间隔是原始帧的1/3,这种分段处理的好处是,通过并行化每个子帧的匹配,可以在现代
cpu中利用多核结构。
[0060]
2)线性插值:
[0061]
另一种常用的运动补偿方法是线性插值,表示(r
k
,t
k
)lidar姿态在当前帧的最后一点,(r
k
‑1,t
k
‑1)在前一帧,在前一帧之间的相对旋转和平移和当前帧,然后:
[0062][0063]
假设t
k
‑1是前一帧中最后一点的采样时间。对于在当前帧的时间t采样的任何点,我们有t∈[t
k
‑1,t
k
]。计算s=(t
‑
t
k
‑1)/(t
k
‑
t
k
‑1)则在时间t处的线性插值姿态为:
[0064][0065]
其中θ是强度,ω是的旋转轴的单位向量。是ω的称矩阵。根据rodrigue的公式,我们有:
[0066][0067]
这意味着仅需要为当前帧的每个点计算sin(sθ)和cos(sθ),而其余的保持不变,这样可以节省一些计算,对于当前时间的lidar姿态为:
[0068][0069]
然后我们可以通过插值姿势将时间t的点投影到全局地图上,如下所示:
[0070]
p
w
(t)=r
t
p
l
+t
t
[0071]
离群值剔除,动态对象过滤:
[0072]
为了避免在现实环境中移动物体而降低扫描匹配的准确性,我们执行以下动态物体过滤:在迭代姿势优化的每次迭代中,我们重新找到每个特征点的最近邻居并添加边到边目标函数的残差和平面间残差,我们首先以少量迭代(例如,实验中使用2次)执行姿势优化,使用优化结果,我们计算目标函数的残差和平面间残差中的两个残差,并去除前20%的最大残差,去除异常值后,最终执行全姿势优化。
[0073]
本实用新型通过上述算法获取当前车身的位姿及地图信息,并将该信息用于规划车身路径,根据初始位姿及激光雷达点云数据创建先验地图,根据rrt(快速搜索随机树算法)在所述地图中计算全局路径,计算出的全局路径转化为相应的线速度,角速度信息通过mavlink协议传输给控制器13执行,控制器13输出高电平,低电平信号给驱动板17,驱动板17控制直流电机20的速度及正反转,直流电机20经减速器21减速,并将动力输出至越野轮胎7,带动车身运动,完成测绘任务。
[0074]
以上过程在程序未中止之前,重复执行。
[0075]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1