一种车辆人机共驾的方向盘角度控制方法与流程
1.本发明涉及自动驾驶技术领域,具体涉及一种车辆人机共驾的方向盘角度控制方法。
背景技术:
2.随着人工智能技术的蓬勃发展,自动驾驶技术逐渐受到更高的关注,搭载自动驾驶功能的车辆也受到人们的青睐。自动驾驶的横向控制是实现全自动驾驶的关键步骤之一,横向控制主要是对车辆的行驶方向进行控制,保证车辆行驶在车道线的中央区域。当横向控制功能开启时,自动驾驶车辆在人机控制进行切换的时候,此时并不能保证车辆一定处于中央领域。为了尽快回到中央区域,会出现猛打方向盘的情况,造成车辆在行驶过程中不稳定,影响行车安全。
3.在公开号为cn108803322a的发明专利申请中公开了一种时域变权重的驾驶员-自动驾驶系统柔性接管方法,该方法所采用的是通过模糊评价指标判断危险程度,然后通过时域中权重的改变,使驾驶员的意图逐渐转移到自动驾驶控制器意图上,实现驾驶权的平滑过渡,但是模糊控制规则和隶属度函数的获取与确定仍存在瓶颈与问题,因此急需一种简单明确且高效的方法实现驾驶权的平滑过渡。
技术实现要素:
4.针对现有技术存在的上述不足,本发明要解决的技术问题是:如何提供一种简单明确且高效的方法来实现驾驶权平滑过渡的车辆人机共驾的方向盘角度控制方法。
5.为了解决上述技术问题,本发明采用如下技术方案:
6.一种车辆人机共驾的方向盘角度控制方法,包括以下步骤:
7.步骤1)获取目标车辆的横向控制信息;
8.步骤2)根据所述目标车辆的横向控制信息计算目标车辆的方向盘角度信号误差;
9.步骤3)通过插值计算得到方向盘角度误差修正角度;
10.步骤4)输出修正后的方向盘控制角度信息,对目标车辆的方向盘角度进行控制。
11.优选的,步骤1)中,所述目标车辆的横向控制信息包括横向控制功能开启信号、实际方向盘角度信号和期望方向盘角度信号,并记录横向功能开启时刻的上升沿信号。
12.优选的,步骤2)中,利用目标车辆的实际方向盘角度信号和计算得到的期望方向盘角度信号,计算起始时刻实际方向盘角度与期望方向盘角度之间的角度信号误差。
13.优选的,步骤3)中,利用五次多项式插值计算在规定时间内由实际方向盘角度平滑过渡修正到期望方向盘角度的方向盘角度误差修正角度。
14.优选的,步骤4)中,以步骤3)中得到的方向盘角度误差修正角度作为修正后的方向盘控制角度信息进行输出。
15.优选的,步骤3)中,五次多项式的曲线方程为:
16.q(t)=a0+a1*(t-t0)+a2*(t-t0)2+a3*(t-t0)3+a4*(t-t0)4+a5*(t-t0)5;(1)
17.式中:q1(t)为方向盘在t时刻的角度;
18.t0为起始时刻;
19.a0、a1、a2、a3、a4、a5为系数。
20.优选的,设定起点时刻t0方向盘的角度q(t0)、速度v0和加速度a0分别为:
21.q(t0)=q0;
22.设定终点时刻t1方向盘的角度q(t1)、速度v1和加速度a1分别为:
23.q(t1)=q1;
24.则根据公式(1)、(2)、(3)可以得到:
25.a0=q026.al=v0
[0027][0028][0029][0030][0031]
式中:t=t
1-t0;h=q
1-q0。
[0032]
优选的,设定q0=0;a0=0;v0=0;a1=0;v1=0;则结合公式(1)到(4),可得到以下公式:
[0033][0034]
式中,ti为当前插值时刻,q(ti)为当前时刻与起始时刻方向盘的角度增量。
[0035]
优选的,步骤3)在插值过程中,加入当前时刻ti和起始时刻t0的期望方向盘角度差值sw,且sw的计算公式为:
[0036][0037]
式中,swi是当前时刻ti的期望方向盘角度,sw0是起始时刻t0的期望方向盘角度。
[0038]
优选的,步骤4)中,校核插值时间判断目标车辆是否处于插值过程中,若插值时间小于规定时间,则将步骤3)得到的方向盘角度误差修正角度作为修正后的方向盘控制角度信息进行输出;若插值时间大于等于规定时间,则不进行插值,直接将期望方向盘角度作为修正后的方向盘控制角度信息进行输出。
[0039]
与现有技术相比,本发明具有以下优点:
[0040]
1、本发明在横向功能开启或关闭时,采用实际方向盘角度与期望方向盘角度以五次多项式样条曲线平滑过渡的方法,用于解决驾驶员在开启或关闭横向功能时出现方向盘猛打的情况,影响行车安全,带给驾驶员和乘客不良的乘坐体验的技术问题。
[0041]
2、本发明对于具有n个数据点的情况,可以对所有相邻的2个点应用上述五次多项式的公式,最终得到的插值曲线无论是位置、速度还是加速度三条曲线都是连续的,并且位置和速度还是平滑的。
[0042]
3、本发明的五次多项式插值拥有轨迹平滑、运动稳定等诸多优点,足以应付大部分的场景,但是它在插值过程中往往伴随着计算量大的缺点,为了优化域控制器的内存,减小运算量,本发明进一步采用增量式的五次多项式插值来简便运算过程。
[0043]
4、本发明在插值过程中,加入当前时刻和起始时刻的期望方向盘转角差值,使得插值过程是连续的,输出的当前时刻和起始时刻的期望方向盘转角差值也是连续的,在规定时间内由五次多项式输出的插值结果也是光滑连续的,不会出现突变的情况。
附图说明
[0044]
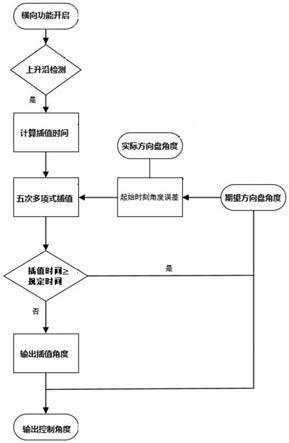
图1为本发明车辆人机共驾的方向盘角度控制方法的流程图。
具体实施方式
[0045]
下面将结合附图及实施例对本发明作进一步说明。
[0046]
如附图1所示,一种车辆人机共驾的方向盘角度控制方法,包括以下步骤:
[0047]
步骤1)获取目标车辆的横向控制信息。目标车辆的横向控制信息包括横向控制功能开启信号、实际方向盘角度信号和期望方向盘角度信号,并记录横向功能开启时刻的上升沿信号,本方法仅在功能刚开启或关闭时刻起作用。
[0048]
步骤2)根据所述目标车辆的横向控制信息计算目标车辆的方向盘角度信号误差。利用目标车辆的实际方向盘角度信号和计算得到的期望方向盘角度信号,计算起始时刻实际方向盘角度与期望方向盘角度之间的角度信号误差,并将当前的角度误差记录下来在插值过程中使用。
[0049]
步骤3)通过插值计算得到方向盘角度误差修正角度。利用五次多项式插值计算在规定时间内由实际方向盘角度平滑过渡修正到期望方向盘角度的方向盘角度误差修正角度。
[0050]
步骤4)输出修正后的方向盘控制角度信息,对目标车辆的方向盘角度进行控制。以步骤3)中得到的方向盘角度误差修正角度作为修正后的方向盘控制角度信息进行输出。
[0051]
在本实施例中,当横向功能开启或关闭时,在规定时间内进行五次多项式插值,以输出一个连续平缓的方向盘角度信号;若超出规定时间则直接采用期望方向盘角度信号控制目标车辆居中行驶。
[0052]
在本实施例中,当检测到横向功能开启且触发上升沿时,开始计算插值时间。从0开始每次增加一个周期时间,直至叠加至规定时间为止,若运行过程中未叠加至规定时间时横向功能已退出,则退出插值时间计算,等待下次激活。
[0053]
在本实施例中,五次多项式的曲线方程为:
[0054]
q(t)=a0+a1*(t-t0)+a2*(t-t0)2+a3*(t-t0)3+a4*(t-t0)4+a5*(t-t0)5;(1)
[0055]
式中:q(t)为方向盘在t时刻的角度;
[0056]
t0为起始时刻;
[0057]
a0、a1、a2、a3、a4、a5为系数。
[0058]
在本实施例中,设定起点时刻t0方向盘的角度q(t0)、速度v0和加速度a0分别为:
[0059]
q(t0)=q0;
[0060]
设定终点时刻t1方向盘的角度q(t1)、速度v1和加速度a1分别为:
[0061]
q(t1)=q1;
[0062]
则根据公式(1)、(2)、(3)可以得到:
[0063]
a0=q0[0064]
01=v0
[0065][0066][0067][0068][0069]
式中:t=t
1-t0;h=q
1-q10。
[0070]
在本实施例中,五次多项式插值拥有轨迹平滑、运动稳定等诸多优点,足以应付大部分的场景,但是它在插值过程中往往伴随着计算量大的缺点。在算力并不充足的汽车域控制器上,使用五次多项式插值会耗费较大的内存空间,为了优化域控制器的内存,减小运算量,故采用一种增量式的五次多项式插值来简便运算过程。
[0071]
在增量式的五次多项式插值过程中,设定q0=0;a0=0;v0=0;a1=0;v1=0;则结合公式(1)到(4),可得到以下公式:
[0072][0073]
式中,ti为当前插值时刻,q(ti)为当前时刻与起始时刻方向盘的角度增量。
[0074]
同时,在目标车辆行驶时,汽车的期望方向盘角度和实际方向盘角度实时更新,则h值也是实时更新的,这样计算出来的插值结果并不能保证在整个插值过程中一定是连续平滑的。为了保证输出结果的连续性和平滑性,在插值过程中一直使用起始时刻的角度误差值,即维持h值不变,则插值过程中角度增量q(ti)才是按照五次多项式平滑增长的。
[0075]
在本实施例中,由于目标车辆的期望方向盘角度是时刻变化的,不能一直使用起始时刻的期望方向盘角度来控制目标车辆,否则插值结束时方向盘角度会有一个突变,给车辆用户不良的驾驶体验。为了弥补当前时刻与起始时刻的期望方向盘角度误差,引入当前时刻的期望方向盘转角来解决插值结束后的角度突变问题,加入当前时刻ti和起始时刻t0的期望方向盘角度差值sw,且sw的计算公式为:
[0076][0077]
式中,swi是当前时刻ti的期望方向盘角度;sw0是起始时刻t0的期望方向盘角度。
[0078]
这样,在插值过程中,加入当前时刻和起始时刻的期望方向盘角度差值。插值过程是连续的,输出的当前时刻和起始时刻的期望方向盘转角差值也是连续的,在规定时间内由五次多项式输出的插值结果也是光滑连续的,不会出现突变的情况。
[0079]
在本实施例中,步骤4)中,校核插值时间判断目标车辆是否处于插值过程中,若插值时间小于规定时间,则将步骤3)得到的方向盘角度误差修正角度作为修正后的方向盘控制角度信息进行输出;若插值时间大于等于规定时间,则不进行插值,直接将期望方向盘角
度作为修正后的方向盘控制角度信息进行输出。
[0080]
与现有技术相比,本发明在横向功能开启或关闭时,采用实际方向盘角度与期望方向盘角度以五次多项式样条曲线平滑过渡的方法,用于解决驾驶员在开启或关闭横向功能时出现方向盘猛打的情况,影响行车安全,带给驾驶员和乘客不良的乘坐体验的技术问题。本发明对于具有n个数据点的情况,可以对所有相邻的2个点应用上述五次多项式的公式,最终得到的插值曲线无论是位置、速度还是加速度三条曲线都是连续的,并且位置和速度还是平滑的。
[0081]
最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1