内河LNG双燃料船舶安全驾驶控制装置的制作方法
内河lng双燃料船舶安全驾驶控制装置
技术领域
1.本实用新型属于内河lng双燃料船舶设备技术领域,具体涉及了内河lng双燃料船舶安全驾驶控制装置。
背景技术:
2.当前因船舶引发的环境污染问题日益受到关注,交通部运输办公厅制定了多项节约能源、环境保护的标准体系,对于船舶排放标准进行了严格的界定。我国在天然气利用政策中将“内河、湖泊和沿海航运的以天然气(尤其是液化天然气)为燃料的运输船舶(含双燃料和单一天然气燃料运输船舶)”列为优先类用户,鼓励应用。lng双燃料船舶与传统船舶和单一天然气燃料船舶相比具有双重优势,在内河航运中得到大力发展。
3.同时,船舶的辅助驾驶和安全驾驶技术一直是关注和研发的热点。如中国专利申请号为201610563855.4公开的一种江河渡船防碰撞装置,包括ais接收机、雷达、船载cctv、岸基cctv、vhf和控制主机,通过装置自动判断发现安全隐患,并通知到对应的客渡船驾驶人员,提醒其及时采取措施避免事故发生。如中国专利申请号201910482956.2公开的一种智能船舶自主避碰的分布式仿真测试系统及方法,通过将分布式技术引入船舶的自主碰撞仿真测试领域,服务器与各客户端独立运行,实现更多场景变化的模拟,提高仿真测试系统的多样性。以上技术没有解决的问题有:
4.(1)内河环境下船舶四周障碍物探测分析;
5.(2)针对lng双燃料船舶的安全制动与转向;
6.(3)船舶转向过程的安全性监测。
技术实现要素:
7.本实用新型的目的在于针对现有技术的不足,提供了集成性高、安装便捷的内河lng双燃料船舶安全驾驶控制装置,实现lng双燃料船舶在内河流域航行时的安全监测与驾驶控制。
8.为了实现上述目的,本实用新型采用了以下技术方案:
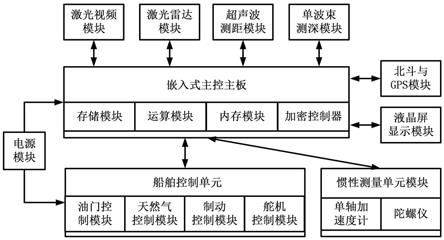
9.内河lng双燃料船舶安全驾驶控制装置,包括嵌入式主控主板、船舶控制单元、电源模块、激光视频模块、激光雷达模块、超声波测距模块、单波束测深模块、北斗与gps模块、液晶屏显示模块、惯性测量单元模块;所述的电源模块分别与嵌入式主控主板、船舶控制单元连接。
10.所述的船舶控制单元、激光视频模块、激光雷达模块、超声波测距模块、单波束测深模块、北斗与gps模块、液晶屏显示模块、惯性测量单元模块分别与嵌入式主控主板相连接;
11.所述的嵌入式主控主板固化集成了存储模块、运算模块、内存模块和加密控制器;
12.所述的船舶控制单元固化集成了油门控制模块、天然气控制模块、制动控制模块和舵机控制模块。
13.所述的电源模块采用电瓶供电模式,与船载电瓶连接后可以持续为嵌入式主控主板和船舶控制单元供电。
14.所述的加密控制器采用满足eal4+通用标准的嵌入式加密控制器。
15.所述的激光视频模块包括4个激光摄像头;所述的激光雷达模块包括2个激光雷达传感器;所述的超声波测距模块包括12个超声波传感器;所述的单波束测深模块包括2个单波束测深传感器;所述的液晶屏显示模块为led液晶触摸屏。
16.所述的北斗与gps模块包括北斗卫星导航芯片(支持bd1、bd2)、gps芯片。
17.所述的惯性测量单元模块包括6个单轴加速度计和6个陀螺仪。
18.所述的存储模块包括容量大于64g的固态硬盘和容量大于32g的flash芯片;所述的运算模块采用arm微处理器;所述的内存模块采用内置ram内存卡。
19.所述的油门控制模块与船用发动机电子油门控制器相连接;所述的天然气控制模块与船用lng发动机电子调速器相连接;所述的制动控制模块与船用制动控制电机相连接,能够传送制动信号到船用制动控制电机上,驱动电机进行船舶制动;所述的舵机控制模块与船舶自动舵控制系统相连接,能够传送控制指令到船舶自动舵控制系统上,控制船舶转向。
20.与现有技术相比较,本实用新型的优点:
21.1.多传感器在复杂环境下探测船舶四周障碍物,通过激光视频、激光雷达、超声波雷达的综合应用,实现夜视环境、远距离和近距离等多种场景下的障碍物探测和测距;
22.2.安全性能高。采用硬件加密器集成的方式,可以对装置上的嵌入式软件和数据传输进行有效加密,防止恶意篡改、干扰和使用;
23.3.自动化程度高,当发现障碍物并分析有危险时,可以自动控制发动机对燃油或天然气进行调速,降低航行速度,或自动进行船舶转向、制动。
附图说明
24.图1是本实用新型的结构框架示意图。
具体实施方式
25.下面结合附图和实施例对本实用新型进一步说明,但本实用新型的保护范围不局限于以下实施例。
26.实施例:
27.参见图1所示,内河lng双燃料船舶安全驾驶控制装置,包括嵌入式主控主板、船舶控制单元、电源模块、激光视频模块、激光雷达模块、超声波测距模块、单波束测深模块、北斗与gps模块、液晶屏显示模块、惯性测量单元模块;所述的电源模块分别与嵌入式主控主板、船舶控制单元连接;所述的船舶控制单元、激光视频模块、激光雷达模块、超声波测距模块、单波束测深模块、北斗与gps模块、液晶屏显示模块、惯性测量单元模块分别与嵌入式主控主板相连接。
28.所述的电源模块采用电瓶供电模式,与船载电瓶连接后可以持续为嵌入式主控主板和船舶控制单元供电。
29.所述的存储模块包括容量大于64g的固态硬盘和容量大于32g的flash芯片;所述
的运算模块采用arm微处理器;所述的内存模块采用内置ram内存卡。固态硬盘用于存放各传感器采集的原始数据、装置分析后的数据,以及应对不安全状况所采取的历史操作数据。flash芯片用于存放嵌入式操作系统,可以是以嵌入式系统形式运行的android、linux等系统。
30.激光视频模块、激光雷达模块、超声波测距模块、单波束测深模块和惯性测量单元模块通过rs485专用电缆与嵌入式主控主板相连接。
31.激光视频模块包括4个激光摄像头,该激光摄像头的参数为:激光夜视距离1000米,200万像素,分辨率达1920*1080,图像传感器1/2.8" 2.0m progressive scan cmos,日/夜切换:icr 红外滤片,最低照度0.006 lux(icr on, agc on 1/25sec)激光波长808 nm /810nm。在船头、船尾、左舷和右舷各安装1个。可设定拍照模式或录像模式,采集到的图像或视频数据存入存储模块,并按照一定间隔时间分析数据,判断船舶周围障碍物情况。
32.激光雷达模块包括2个激光雷达传感器,分别安装在船头和船尾,主要进行远距离障碍物的测距。该激光雷达传感器的参数为:测量距离1000米,最小角分辨率(垂直)0.11
°
,非线性分水平方向角分辨率0.1
°
至0.4
°
,垂直视角范围40
°
(
‑
25
°
至15
°
),水平视角范围360
°
,返回模式为四次回波,旋转频率5hz至20hz,波长808nm。
33.超声波测距模块包括12个超声波传感器,船头、船尾、左舷、右舷各安装3个,主要是在障碍物靠近或船舶进行避碰转向时进行近距离测距。该超声波传感器的参数为:超声波测距范围0.5m
‑
20m,分辨率5mm,精度+30mm。
34.单波束测深模块包括2个单波束测深传感器,船头和船尾各使用1个,参数为:小可测深度<0.5m,大可测深度300m,探测精度0.01m+0.1%h(h为探测深度)。将水深探测、北斗与gps导航、航道地图相结合,可以自动判断船舶距离岸边的远近,降低船舶自动转向造成的危险。
35.惯性测量单元模块包括6个单轴加速度计和6个陀螺仪,其中3个单轴加速度计和3个陀螺仪组成1个6轴惯性测量单元。船头和船尾各用1个惯性测量单元,用于测量船体的姿态,当船体倾斜超过预定阀值时,将在液晶屏显示模块上发出报警信息。
36.油门控制模块与船用发动机电子油门控制器相连,天然气控制模块与船用lng发动机电子调速器相连接。当装置判断出障碍物的距离不远需要减速时,根据船舶当前使用的动力源,通过油门控制模块或天然气控制模块向船用发动机发送对应的控制指令,降低航速。
37.制动控制模块与船用制动控制电机相连接,能够传送制动信号到船用制动控制电机上,驱动电机进行船舶制动。舵机控制模块与船舶自动舵控制系统相连接,装置判断障碍物太近需要转向时,通过舵机控制模块向船舶自动舵控制系统发送转向指令,使船舶按指令要求转向。
38.装置接通电源的情况下,默认开启船舶控制单元,可以通过液晶屏显示模块手动启停船舶控制单元。当船舶控制单元关闭时,装置仅起到监测和预警作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1