一种水下机器人用机械超深保护装置的制作方法
1.本实用新型涉及水下机器人领域,尤其涉及一种水下机器人用机械超深保护装置。
背景技术:
2.随着海洋开发进程的加快,水下机器人的发展也在不断的进步,但复杂的水下环境大大增加了水下机器人的安全隐患,靠控制系统监测水下机器人的航行状态是最普遍的保护措施,但如果电池故障或控制系统死机,将会带来毁灭性的风险,因此靠机械结构监测水下机器人深度的变化,作为意外保护措施,控制抛载触发,使设备迅速上浮是今后发展的趋势,研究一款机械超深保护装置是水下机器人领域的重要问题之一。
3.目前国内机械超深保护装置采用簧片形变触发微动开关,虽然理论上能起到超深防护效果,但簧片的触发力难以计算,并且在不更换簧片的条件下触发力无法调整,无法精确设定超深保护深度,因此一款实用的水下机器人超深保护装置成为技术突破的主要问题之一。
技术实现要素:
4.本实用新型提供了一种水下机器人用机械超深保护装置,采用压力变化导致弹簧压缩,从而伸缩杆触发微动开关的方式检测深度的变化,由弹簧的压缩量和弹性系数可以计算保护装置的触发深度,在弹簧上端设有调压螺母,当预期触发深度和实际触发深度有偏差时,可以调整弹簧触发态的压缩量,从而微调超深保护装置的触发深度,达到精确设定超深保护深度的目的,保证航行器的安全,极大地提高了机械超深保护装置的实用性,使得机械超深保护装置的标准化和市场化成为可能。
5.为解决上述技术问题,本技术实施例提供了一种水下机器人用机械超深保护装置,包括密封盖、外壳体和水密接插件,其特征在于,还包括下端盖、皮囊、防护螺母、伸缩杆、弹簧、调压螺母、上端盖和微动开关,所述的下端盖为空心的圆柱形结构,下端盖外侧面与外壳体的内侧面相配合,下端盖与外壳体之间设有o型密封圈,下端盖内侧面与皮囊外侧面相接触,皮囊下侧设有防护螺母,所述的防护螺母为圆柱形结构,防护螺母外侧面通过螺纹与下端盖内侧面相连接,防护螺母中间设有六个圆柱形通孔,皮囊内侧设有“凸”字形伸缩杆,伸缩杆下端外侧面与皮囊内侧面相接触,伸缩杆上端外侧面设有弹簧,弹簧下端与伸缩杆相接触,弹簧上端与调压螺母相接触,所述的调压螺母为倒立的“凹”字形结构,调压螺母外侧面通过螺纹与上端盖内侧面相连接,上端盖下端面通过连接法兰与下端盖相连接,上端盖上侧设有微动开关,调压螺母侧壁面上均布设有六个圆柱形通孔,上端盖侧壁面均布设有四个矩形槽,外壳体上端内侧面与密封盖外侧面相配合,外壳体与密封盖之间设有o型密封圈,密封盖中间设有水密接插件,水密接插件通过螺纹与密封盖相连接。
6.作为本方案的优选实施例,所述的上端盖侧壁面的矩形槽与调压螺母侧壁面的圆柱形通孔相匹配,可通过上端盖侧壁面的矩形槽转动调压螺母侧壁面上通孔,调压螺母的
上下移动改变弹簧的压缩量,弹簧一直处于压缩状态。
7.作为本方案的优选实施例,所述的伸缩杆与微动开关的触发点在同一条轴线上。
8.本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
9.采用压力变化导致弹簧压缩,从而伸缩杆触发微动开关的方式检测深度的变化,由弹簧的压缩量和弹性系数可以计算保护装置的触发深度,在弹簧上端设有调压螺母,当预期触发深度和实际触发深度有偏差时,可以调整弹簧触发态的压缩量,从而微调超深保护装置的触发深度,达到精确设定超深保护深度的目的,保证航行器的安全,极大地提高了机械超深保护装置的实用性,使得机械超深保护装置的标准化和市场化成为可能。
附图说明
10.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
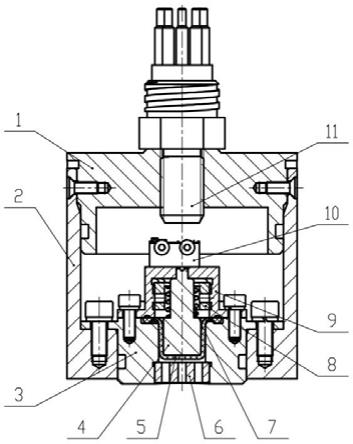
11.图1是本技术实施例的结构示意图。
12.图1中,1.密封盖、2.外壳体、3.上端盖、4.伸缩杆、5.皮囊、6.防护螺母、7.弹簧、8.调压螺母、9.上端盖、10.微动开关、11.水密接插件。
具体实施方式
13.本实用新型提供了一种水下机器人用机械超深保护装置,采用压力变化导致弹簧压缩,从而伸缩杆触发微动开关的方式检测深度的变化,由弹簧的压缩量和弹性系数可以计算保护装置的触发深度,在弹簧上端设有调压螺母,当预期触发深度和实际触发深度有偏差时,可以调整弹簧触发态的压缩量,从而微调超深保护装置的触发深度,达到精确设定超深保护深度的目的,保证航行器的安全,极大地提高了机械超深保护装置的实用性,使得机械超深保护装置的标准化和市场化成为可能。
14.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
15.如图1所示,本实施例所述的一种水下机器人用机械超深保护装置,包括密封盖1、外壳体2和水密接插件11,其特征在于,还包括下端盖3、皮囊5、防护螺母6、伸缩杆4、弹簧7、调压螺母8、上端盖9和微动开关10,所述的下端盖3为空心的圆柱形结构,下端盖3外侧面与外壳体2的内侧面相配合,下端盖3与外壳体2之间设有o型密封圈,下端盖3内侧面与皮囊5外侧面相接触,皮囊5下侧设有防护螺母6,所述的防护螺母6为圆柱形结构,防护螺母6外侧面通过螺纹与下端盖3内侧面相连接,防护螺母6中间设有六个圆柱形通孔,皮囊5内侧设有“凸”字形伸缩杆4,伸缩杆4下端外侧面与皮囊5内侧面相接触,伸缩杆4上端外侧面设有弹簧7,弹簧7下端与伸缩杆4相接触,弹簧7上端与调压螺母8相接触,所述的调压螺母8为倒立的“凹”字形结构,调压螺母8外侧面通过螺纹与上端盖9内侧面相连接,上端盖9下端面通过连接法兰与下端盖3相连接,上端盖9上侧设有微动开关10,调压螺母8侧壁面上均布设有六个圆柱形通孔,上端盖9侧壁面均布设有四个矩形槽,外壳体2上端内侧面与密封盖1外侧面相配合,外壳体2与密封盖1之间设有o型密封圈,密封盖1中间设有水密接插件11,水密接插
件11通过螺纹与密封盖1相连接。
16.其中,在实际应用中,所述的上端盖9侧壁面的矩形槽与调压螺母8侧壁面的圆柱形通孔相匹配,可通过上端盖9侧壁面的矩形槽转动调压螺母8侧壁面上通孔,调压螺母8的上下移动改变弹簧7的压缩量,弹簧7一直处于压缩状态,调压螺母8的上下移动可微调弹簧7触发态的压缩量,从而精确调整微动开关10的触发压力,达到精确设定超深保护深度的目的。
17.其中,在实际应用中,所述的伸缩杆4与微动开关10的触发点在同一条轴线上,使得当水下机器人航行深度超过预设深度时,伸缩杆4可以触发微动开关10,启动应急预案,保证水下机器人的安全。
18.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1