一种视频卫星对运动目标的凝视跟踪控制方法及系统
1.本发明属于视频卫星设计领域,具体涉及一种视频卫星对运动目标的凝视跟踪控制方法及系统。
背景技术:
2.视频卫星是最近几年发展起来的一种新型对地观测卫星,是一种采用视频成像、视频数据实时传输、工作方式为人在回路交互式操作的小卫星,与传统的对地观测卫星相比,其最大的特点是可以对某一目标区域进行“凝视”观测,获取该区域连续的视频信息。目前,已有一定数量的视频卫星在轨运行,其中国外的有:印度尼西亚的lapan—tubsat卫星、美国的skysat系列卫星等;国内的有:“天拓二号”卫星、“吉林一号”卫星等。视频卫星对抢险救灾、战场监控、交通监测等发挥着至关重要的作用。所谓视频卫星凝视成像,是指卫星在对地观测过程中,通过姿态控制系统实时调整卫星的姿态,使其光学遥感器始终对准某一目标区域并进行连续拍摄,获取目标区域的视频数据。
3.近年来,人们对视频卫星的姿态凝视跟踪问题进行了大量研究并且积累了丰富的实践经验。文献“adaptive attitude tracking control for rigid spacecraft with finite
‑
time convergence”(作者:kunfeng lu,yuanqing xia;期刊:automatica;年份:2013;卷:49;页码3591
–
3599)根据刚体动力学推导了基于误差四元数和误差角速度的卫星姿态跟踪运动学方程和动力学方程,设计了一种自适应有限时间终端滑模控制方法,很好的满足了卫星姿态控制快速性和高精度两个要求;文献“低轨对地凝视卫星姿态控制”(作者:邬树楠,孙兆伟,叶东;期刊:上海航天;年份:2010;页码:15
‑
19)在低轨卫星对地凝视的姿态控制研究中采用了一种变结构控制律,该控制较传统pd控制响应速度更快,具有较好的鲁棒性,而且能有效增加对地凝视时间;文献“adaptive fuzzy sliding mode control for flexible satellite”(作者:ping guan,xiang
‑
jie liu,ji
‑
zhen liu;期刊:engineering application of artificial intelligence;年份:2005;卷:18;页码:451
‑
459)针对航天器的姿态跟踪控制问题,提出了自适应模糊滑模控制方法,将模糊规则运用到滑模控制中的到达控制部分,使得控制增益得到动态减小,抖振得到有效的减弱;文献“视频小卫星对地凝视高稳定度姿态控制方法研究”(作者:黄富强;单位:国防科学技术大学;类型:硕士学位论文;年份:2016)以视频卫星对多目标凝视成像的任务需求为研究对象,提出了一种基于混合双层编码遗传算法的多指标优化凝视观测任务规划方法,该方法能计算得到对多目标观测时使指标函数达到最优的观测顺序;文献“低轨对地凝视卫星姿态模糊控制器设计”(作者:孙兆伟,梁朝海,邬树楠;期刊:上海航天;年份:2010;卷(期):27(6);页码:1
‑
5)以视频卫星凝视成像精度高、成像时间长为目标,设计了一种滑模控制率,并且采用干扰观测器来抑制滑模控制的固有振颤,设计的控制器能明显改善响应速度,并有效减弱了振颤问题。但是,上述现有技术文献资料都是针对地面固定目标开展的凝视跟踪控制研究,没有考虑地面运动目标的凝视跟踪问题。
技术实现要素:
4.本发明要解决的技术问题是:提供一种视频卫星对运动目标的凝视跟踪控制方法及系统,旨在解决视频卫星对一类地面运动的目标进行凝视跟踪控制的问题。
5.为了解决上述技术问题,本发明所采用的技术方案是:
6.一种视频卫星对运动目标的凝视跟踪控制方法,在运动目标的凝视跟踪控制时,针对预设的视频卫星姿态凝视跟踪模型采用pd控制器进行卫星的姿态控制,所采用pd控制器的函数表达式为:
[0007][0008]
上式中,t为所述pd控制器输出的控制力矩;系数k
p
=e
5a
·
k
p
,系数k
d
=[(1
‑
e
‑
5a
)]
·
k
d
,其中系数k
p
、k
d
是常值正定矩阵,q
eυ
为姿态误差四元数q
e
的矢量;w
e
为姿态误差角速度;a(q
e
)为期望坐标系到卫星本体坐标系的转换矩阵,q
e
为姿态误差四元数;w
t
为期望姿态角速度,为期望姿态角速度w
t
的导数;j为卫星转动惯量,h为执行机构的动量矩;其中:
[0009][0010]
其中,q
e0
为姿态误差四元数q
e
的标量,i表示单位矩阵,i3表示三阶单位矩阵;上标t表示矩阵的转置;(
·
)
×
表示斜对称矩阵算子,对任意向量x=[x
1 x
2 x3]
t
,有且斜对称矩阵算子为:
[0011][0012]
可选地,所述预设的视频卫星姿态凝视跟踪模型的函数表达式为:
[0013][0014]
上式中,j为卫星转动惯量,为姿态误差角速度的导数,w
e
为姿态误差角速度,a(q
e
)为期望坐标系到卫星本体坐标系的转换矩阵,w
t
为期望姿态角速度,为期望姿态角速度的导数,q
e0
为姿态误差四元数q
e
的标量,q
ev
为姿态误差四元数q
e
的矢量,(
·
)
×
表示斜对称矩阵算子,t为pd控制器输出的控制力矩,t
d
为干扰力矩。
[0015]
可选地,所述针对预设的视频卫星姿态凝视跟踪模型采用pd控制器进行卫星的姿态控制之前还包括推导视频卫星姿态凝视跟踪模型的步骤:
[0016]
s1、基于双矢量方法计算视频卫星相对于地球惯性坐标系的期望姿态四元素;;
[0017]
s2、计算视频卫星的期望姿态角速度和期望姿态角加速度;
[0018]
s3、建立视频卫星的姿态跟踪运动学方程和姿态跟踪动力学方程;
[0019]
s4、基于误差四元数和误差姿态角速度,建立视频卫星对运动目标的凝视姿态跟踪模型。
[0020]
可选地,步骤s1包括:
[0021]
s1.1、坐标系定义:地球惯性坐标系o
i
‑
x
i
y
i
z
i
,选用j2000.0坐标系,以地心为坐标系原点,o
i
z
i
轴指向j2000.0年平赤道的极点,o
i
x
i
轴指向j2000.0平春分点,o
i
y
i
轴与o
i
x
i
轴和o
i
z
i
轴构成右手坐标系;地球固连坐标系为o
e
‑
x
e
y
e
z
e
,以地心为坐标系原点,o
e
z
e
指向地球
北极,o
e
x
e
指向地球赤道面与格林尼治子午线的交点,o
e
y
e
在赤道平面内与o
e
x
e
轴和o
e
z
e
轴构成右手坐标系;卫星本体坐标系为o
b
‑
x
b
y
b
z
b
,以卫星的质心为坐标系原点,三个坐标轴方向分别沿着卫星本体惯量主轴的三个方向;期望坐标系o
t
‑
x
t
y
t
z
t
,以卫星本体坐标系为参考,坐标系原点为卫星质心,并根据目标姿态角确定期望坐标系相对卫星本体坐标系的位置。
[0022]
s1.2、采用双矢量方法计算视频卫星凝视时的期望姿态:首先计算凝视目标对应的地面点t0(l
t0,
b
t0,
h
t0
)、t1(l
t1,
b
t1,
h
t1
)在地球惯性坐标系的位置矢量r
t0
(x
t0
,y
t0
,z
t0
)、r
t1
(x
t1
,y
t1
,z
t1
),地面点中的三元素l、b、h分别表示地面点地理经度、地面点地理纬度、地面点高程;位置矢量中的三元素分别表示xyz轴坐标;
[0023]
s1.3、计算卫星质心指向地面点t0、t1的矢量分别在地球惯性坐标系和卫星本体坐标系中的分量:
[0024]
计算卫星质心指向地面点t0的矢量在地球惯性坐标系中分量
[0025][0026]
其中,r
t0
表示地面点t0在地球惯性坐标系的位置矢量,r
c
表示卫星质心在地球惯性坐标系的位置矢量;
[0027]
计算卫星质心指向地面点t0的矢量在卫星本体坐标系中分量
[0028][0029]
其中,表示地球惯性坐标系到卫星本体坐标系的转换矩阵,为卫星质心指向地面点t0的矢量在地球惯性坐标系中分量;
[0030]
计算卫星质心指向地面点t1的矢量在地球惯性坐标系中分量:
[0031][0032]
其中,r
t1
表示地面点t1在地球惯性坐标系的位置矢量,r
c
表示卫星质心在地球惯性坐标系的位置矢量;
[0033]
计算卫星质心指向地面点t1的矢量在卫星本体坐标系中分量:
[0034][0035]
其中,为卫星质心指向地面点t1的矢量在地球惯性坐标系中分量;
[0036]
s1.4、由卫星质心指向地面点t0的矢量ct0在地球惯性坐标系中的分量的和在卫星本体坐标系中的分量以及卫星质心指向地面点t1的矢量ct1在地球惯性坐标系中的分量和在卫星本体坐标系中的分量通过非共线双矢量构建期望坐标系,由此得到对地凝视期望姿态下地球惯性坐标系到卫星本体坐标系的转换矩阵:
[0037]
以ct0和ct1两个非共线矢量构建过渡坐标系o1‑
x1y1z1为:
[0038][0039]
其中,o1x1,o1y1,o1z1分别为过渡坐标系o1‑
x1y1z1的三个轴;
[0040]
过渡坐标系o1‑
x1y1z1到卫星本体坐标系的转换矩阵为:
[0041][0042]
过渡坐标系o1‑
x1y1z1到地心地球惯性坐标系的转换矩阵为:
[0043][0044]
得到对地凝视期望姿态下地球惯性坐标系到卫星本体坐标系的转换矩阵为:
[0045][0046]
s1.5、将对地凝视期望姿态下地球惯性坐标系到卫星本体坐标系的转换矩阵根据方向阵和姿态四元素之间的转换关系可得到对应的姿态四元素q
t
。
[0047]
可选地,步骤s2中计算视频卫星的期望姿态角速度和期望姿态角加速度时,采用下式计算视频卫星相对于地球惯性坐标系的期望姿态角速度ω
t
:
[0048][0049][0050]
其中,w
t
为期望姿态角速度,q
t
为期望姿态四元数,为期望姿态四元数q
t
的导数,q
t0
为期望姿态四元数q
t
的标量;q
tυ
=[q
t1 q
t2 q
t3
]
t
为期望姿态四元数q
t
的矢量;上标t表示矩阵的转置,而上标
×
表示斜对称矩阵算子;i表示单位矩阵;为期望姿态四元数q
t
的导数,其中期望姿态角加速度的计算函数表达式为:
[0051][0052]
式中,为期望姿态四元数q
t
的二阶导数。
[0053]
可选地,步骤s3中建立的视频卫星的姿态跟踪运动学方程的函数表达式为:
[0054][0055]
其中,q
b
=[q
b0
q
b1
q
b2
q
b3
]
t
=[q
b0 q
bv
]
t
为地球惯性坐标系到卫星本体坐标系的姿态四元数,即真实姿态四元数,其中,q
b0
是真实姿态四元数q
b
的标量,q
bv
是真实姿态四元数q
b
的矢量;w
b
=[w
bx w
by w
bz
]
t
为卫星姿态角速度在卫星本体坐标系中的分量,即真实姿态角速度;i3表示三阶单位矩阵;上标t表示矩阵的转置;(
·
)
×
表示斜对称矩阵算子,对任意向量x=[x
1 x
2 x3]
t
,有
[0056][0057]
步骤s3中建立的视频卫星的姿态跟踪动力学方程的函数表达式为:
[0058][0059]
式中,j为卫星转动惯量矩阵;w
b
为卫星姿态角速度在卫星本体坐标系中的分量,即真实姿态角速度,为真实姿态角速度w
b
的导数;t为控制力矩;t
d
为外部干扰力矩。
[0060]
可选地,所述针对预设的视频卫星姿态凝视跟踪模型采用pd控制器进行卫星的姿态控制之前、推导得出视频卫星姿态凝视跟踪模型之后还包括对pd控制器进行稳定性分析的步骤:
[0061]
a1、确定李雅普诺夫函数v的函数表达式为:
[0062][0063]
上式中,矩阵k
p
=e
5a
·
k
p
,其中k
p
是常值正定矩阵;w
e
为误差角速度,j为卫星转动惯量,q
e0
为误差四元数q
e
的标量,q
ev
为误差四元数q
e
的矢量。
[0064]
a2、对李雅普诺夫函数v求导,忽略卫星转动惯量不确定性和外界干扰,得到:
[0065][0066]
上式中,k
p
=e
5a
·
k
p
,k
p
是常值正定矩阵,w
e
为误差角速度,j为卫星转动惯量,q
e0
为误差四元数q
e
的标量,q
ev
为误差四元数q
e
的矢量。
[0067]
a3、判断李雅普诺夫函数v的求导结果小于等于0是否成立,若成立则判定pd控制器是渐进稳定的。
[0068]
此外,本发明还提供一种视频卫星对运动目标的凝视跟踪控制系统,包括相互连接的微处理器和存储器,所述微处理器被编程或配置以所述视频卫星对运动目标的凝视跟踪控制方法的步骤,或者所述存储器中存储有被编程或配置以所述视频卫星对运动目标的凝视跟踪控制方法的计算机程序。
[0069]
此外,本发明还提供一种视频卫星,包括卫星本体,所述卫星本体包括相互连接的微处理器和存储器,所述微处理器被编程或配置以执行所述视频卫星对运动目标的凝视跟踪控制方法的步骤,或者所述存储器中存储有被编程或配置以执行所述视频卫星对运动目标的凝视跟踪控制方法的计算机程序。
[0070]
此外,本发明还提供一种计算机可读存储介质,该计算机可读存储介质中存储有被编程或配置以执行所述视频卫星对运动目标的凝视跟踪控制方法的计算机程序。
[0071]
与现有技术相比,本发明技术方案具有下述有益效果:
[0072]
本发明能够在跟踪静止以及低、中、高速运动目标时,均能保证较好的控制收敛性,且响应速度快,鲁棒性好,本发明可为视频卫星对运动目标凝视跟踪姿态控制器的设计提供技术参考和支持。
附图说明
[0073]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
[0074]
图1为对地凝视姿态控制示意图。
[0075]
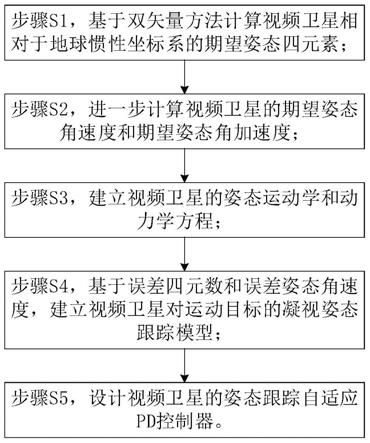
图2为本发明实施例方法的基本流程图。
[0076]
图3为本发明实施例中双矢量确定期望姿态原理图。
[0077]
图4为本发明实施例方法在静止状态下的凝视跟踪控制结果:(a)为姿态误差曲线图;(b)为角速度误差曲线图;(c)为控制力矩曲线图。
[0078]
图5为本发明实施例方法在低速状态下的凝视跟踪控制结果:(a)为姿态误差曲线图;(b)为角速度误差曲线图;(c)为控制力矩曲线图。
[0079]
图6为本发明实施例方法在中速状态下的凝视跟踪控制结果:(a)为姿态误差曲线图;(b)为角速度误差曲线图;(c)为控制力矩曲线图。
[0080]
图7为本发明实施例方法在高速状态下的凝视跟踪控制结果:(a)为姿态误差曲线图;(b)为角速度误差曲线图;(c)为控制力矩曲线图。
具体实施方式
[0081]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0082]
为了描述清晰起见,本发明中使用的相关变量符号的含义如下表1所示。
[0083]
表1各变量或符号的含义
[0084]
[0085][0086]
一、本发明的总体思路
[0087]
视频卫星凝视成像,是指卫星在对地观测过程中,通过姿态控制系统实时调整卫星的姿态,使其光学遥感器始终对准某一目标区域并进行连续拍摄,获取目标区域的视频数据,如图1所示。
[0088]
本发明为解决视频卫星对一类地面运动的目标进行凝视跟踪控制的问题,提出了一种视频卫星对运动目标的凝视跟踪控制方法,其总体思路如下:
[0089]
首先,根据姿态运动学中四元数的相关理论知识和轨道运动学相关理论,推导视频卫星对目标点“凝视”时星体相对于地球惯性坐标系的期望姿态四元数,进一步计算得到期望姿态角速度和期望姿态角加速度,以获取它们的变化规律;然后,建立视频卫星姿态跟踪运动学和动力学方程;接下来,基于误差四元数和误差姿态角速度,建立视频卫星对运动目标的凝视姿态跟踪模型;最后,设计一种基于误差四元数和误差角速度反馈的姿态跟踪自适应pd控制器,并用李雅普诺夫稳定性理论证明闭环系统的稳定性。
[0090]
二、本发明的具体实施步骤流程
[0091]
基于上述总体思路,本发明所述控制方法的具体实施流程包括如图2所示的5个步骤s1
‑
s5,具体描述如下:
[0092]
步骤s1,基于双矢量方法计算视频卫星相对于地球惯性坐标系的期望姿态四元素;
[0093]
首先对相关的坐标系进行定义:
[0094]
地球惯性坐标系o
i
‑
x
i
y
i
z
i
:选用j2000.0坐标系,它以地心为坐标系原点,o
i
z
i
轴指向j2000.0年平赤道的极点,o
i
x
i
轴指向j2000.0平春分点,o
i
y
i
轴与o
i
x
i
轴和o
i
z
i
轴构成右手坐标系。
[0095]
地球固连坐标系o
e
‑
z
e
y
e
z
e
:它以地心为坐标系原点,o
e
z
e
指向地球北极,o
e
x
e
指向地球赤道面与格林尼治子午线的交点,o
e
y
e
在赤道平面内与o
e
x
e
轴和o
e
z
e
轴构成右手坐标系。
[0096]
卫星本体坐标系o
b
‑
x
b
y
b
z
b
:它以卫星的质心为坐标系原点,三个坐标轴方向分别沿着卫星本体惯量主轴的三个方向。
[0097]
期望坐标系o
t
‑
x
t
y
t
z
t
:它以卫星本体坐标系为参考,坐标系原点为卫星质心,并根据目标姿态角确定期望坐标系相对卫星本体坐标系的位置。
[0098]
然后采用双矢量方法计算视频凝视时的期望姿态:
[0099]
双矢量确定期望姿态的原理如图3所示。
[0100]
首先计算地面点t0(l
t0
,b
t0
,h
t0
)、t1(l
t1
,b
t1
,h
t1
)在地球惯性坐标系的位置矢量r
t0
(x
t0
,y
t0
,z
t0
)、r
t1
(x
t1
,y
t1
,z
t1
),计算公式为:
[0101][0102]
其中,l为地面点地理经度,b为地面点地理纬度,h为地面点高程;
[0103]
而n是法线与椭球面交点的卯酉半径,有:
[0104][0105]
式中,e
e
是大地子午圈的偏心率,其表达式为:
[0106][0107]
其中,a
e
是地球椭球长半轴,b
e
是地球椭球短半轴。
[0108]
记r
c
为卫星质心在地球惯性坐标系的位置矢量,则卫星质心指向地面点t0的矢量在地球惯性坐标系中分量可以表示为:
[0109][0110]
卫星质心指向地面点t0的矢量在卫星本体坐标系中分量可以表示为:
[0111][0112]
式中为地球惯性坐标系到卫星本体坐标系的转换矩阵,可由星载传感器可以确定。
[0113]
卫星质心指向地面点t1的矢量在地球惯性坐标系中分量可以表示为:
[0114][0115]
卫星质心指向地面点t1的矢量在卫星本体坐标系中分量可以表示为:
[0116][0117]
由卫星质心指向地面点t0的矢量ct0在地球惯性坐标系中的分量的和在卫星本体坐标系中的分量以及卫星质心指向地面点t1的矢量ct1在地球惯性坐标系中的分量和在卫星本体坐标系中的分量通过非共线双矢量构建期望坐标系,由此得到对地凝视期望姿态下地球惯性坐标系到卫星本体坐标系的转换矩阵。
[0118]
首先以ct0和ct1两个非共线矢量构建过渡坐标系o1‑
x1y1z1:
[0119][0120]
其次计算过渡坐标系o1‑
x1y1z1到卫星本体坐标系的转换矩阵
[0121][0122]
然后计算过渡坐标系o1‑
x1y1z1到地心地球惯性坐标系的转换矩阵
[0123][0124]
从而得到对地凝视期望姿态下地球惯性坐标系到卫星本体坐标系的转换矩阵为:
[0125][0126]
根据方向阵和姿态四元数之间的转换关系,可得到转换矩阵对应的期望姿态四元数q
t
,该期望姿态四元数q
t
为地球惯性坐标系到期望坐标系的姿态四元数。
[0127]
步骤s2,进一步计算视频卫星的期望姿态角速度和期望姿态角加速度;
[0128]
对期望姿态四元数q
t
差分得到通过下式可以计算得到视频卫星相对于地球惯性坐标系的期望角速度w
t
:
[0129][0130]
式中,其中,q
t0
为期望姿态四元数q
t
的标量;q
tv
=[q
t1 q
t2 q
t3
]
t
为期望姿态四元数q
t
的矢量;上标t表示矩阵的转置,而上标
×
表示斜对称矩阵算子;i为单位矩阵。
[0131]
期望角加速度可以通过对期望角速度w
t
求导得到,其表示式为:
[0132][0133]
步骤s3,建立视频卫星的姿态跟踪运动学和动力学方程;
[0134]
视频卫星的姿态运动学方程用于描述各运动参数之间的相互关系,如角速度和姿态角导数之间的关系,而卫星的姿态动力学方程用于描述姿态运动(角速度)和作用力矩之间的关系。本发明基于四元数,建立视频卫星的姿态跟踪运动学和动力学方程。
[0135]
1)姿态跟踪运动学方程
[0136]
采用地球惯性坐标系到本体坐标系的四元数描述的姿态跟踪运动学方程表示为:
[0137][0138]
其中,q
b
=[q
b0 q
b1 q
b2 q
b3
]
t
=[q
b0 q
bv
]
t
为地球惯性坐标系到卫星坐标系的姿态四元数,即真实姿态四元数,其中,q
b0
是真实姿态四元数q
b
的标量,q
bv
是真实姿态四元数q
b
的矢量;上标“·”表示该变量的导数;w
b
=[w
bx w
by w
bz
]
t
为卫星姿态角速度在卫星本体坐标系中的分量,简称真实姿态角速度,即为在卫星本体坐标系中表示的卫星本体坐标系相对于地球惯性坐标系的角速度矢量;(
·
)
×
表示斜对称矩阵算子。
[0139]
对任意向量x=[x
1 x
2 x3]
t
,有:
[0140][0141]
姿态运动学方程式(14)也可以表达为
[0142][0143]
2)姿态跟踪动力学方程
[0144]
视频卫星采用刚体卫星假设,则卫星的姿态跟踪动力学方程为
[0145][0146]
式中,j∈r3×3为卫星的惯量矩阵;t∈r3×1控制力矩;t
d
∈r3×1外部干扰力矩。
[0147]
步骤s4,基于误差四元数和误差姿态角速度,建立视频卫星对运动目标的凝视姿态跟踪模型;
[0148]
卫星姿态跟踪即是对期望姿态的跟踪,因此,当视频卫星对地凝视成像时,根据四元数运算法则,定义姿态跟踪误差为
[0149]
q
e
=q
b
·
q
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0150]
式中,q
b
为本体姿态四元数,即为地球惯性坐标系到卫星本体坐标系的卫星真实姿态四元数;q
t
是期望姿态四元数,即为地球惯性坐标系到期望坐标系的姿态四元数;q
e
为姿态误差四元数,即为期望坐标系到卫星本体坐标系的姿态四元数,它是相对于卫星本体坐标系的期望姿态,可认为是姿态跟踪误差。
[0151]
由上式(18),可以进一步得到姿态角速度跟踪误差为
[0152]
w
e
=w
b
‑
a(q
e
)w
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0153]
其中,w
b
为卫星姿态角速度在卫星本体坐标系中的分量,简称真实姿态角速度;w
t
为卫星姿态角速度在期望坐标系中的分量,简称期望姿态角速度;w
e
为姿态误差角速度,是卫星本体坐标系相对于期望坐标系的误差姿态角速度,可认为是姿态角速度跟踪误差;a(q
e
)为期望坐标系到卫星本体坐标系的转换矩阵,由姿态误差四元数q
e
决定,满足
[0154]
因此,姿态误差运动学方程为
[0155][0156]
对式(19)两边求导,可得:
[0157][0158]
将式(19)、(21)代入式(17),消去姿态角速度w
b
、可以得到以误差角速度ω
e
表示的视频卫星姿态跟踪动力学方程:
[0159]
[0160]
上式(22)即为视频卫星对运动目标的凝视姿态跟踪模型。式(22)中,j为卫星的转动惯量矩阵,w
b
为卫星姿态角速度在本体坐标系中的分量,w
e
为本体坐标系相对于期望坐标系的误差姿态角速度。
[0161]
步骤s5,设计视频卫星的姿态跟踪自适应pd控制器。
[0162]
pd控制器因其简单有效,运算资源需求小,实时性好,广泛运用于卫星的姿态控制系统中。根据式(22)表述的视频卫星姿态凝视跟踪模型,本发明设计的pd控制器如下:
[0163][0164]
式中,k
p
=e
5a
·
k
p
,k
d
=[(1
‑
e
‑
5a
)]
·
k
d
,其中k
p
、k
d
是常值正定矩阵;h为执行机构的动量矩。
[0165]
该控制器设计的基本思想是初始阶段姿态误差角度较大时,能够实现快速机动至目标姿态附近,当接近目标时,又可以减小,运动速度,从而避免过大的超调,当到达控制目标后,又可以稳定在控制目标周围,且具有一定的鲁棒性。
[0166]
对控制器进行稳定性分析,取李雅普诺夫函数v为
[0167][0168]
可以看出v≥0,当且仅当w
e
=0,q
eυ
=0,q
e0
=1时等号成立,所以v是正定的。
[0169]
对v求导数,不考虑卫星转动惯量不确定性和外界的干扰,得到:
[0170][0171]
因为k
p
和k
d
都是正定矩阵,所以由稳定性定理可知,该控制器是渐进稳定的。
[0172]
三、仿真分析与效果验证
[0173]
下面通过matlab/simulink软件对本发明所提出的控制方法进行了模拟仿真验证。
[0174]
1)主要仿真参数
[0175]
卫星轨道要素如下表1所示:
[0176]
表1卫星轨道要素表
[0177][0178]
卫星转动惯量:飞轮的最大控制力矩为0.1n
·
m;
[0179]
运动目标初始大地坐标:(l=123.458
°
,b=25.735
°
,h=0m)
[0180]
初始真实姿态四元数:q
b
=[0.9836 0.1742 0.0096
ꢀ‑
0.0460]
[0181]
初始真实姿态角速度:w
b
=[0.5
ꢀ‑
0.5 0.2]
t
°
/s
[0182]
控制器的参数k
p
、k
d
取为:
[0183][0184]
运动目标速度设定如表2所示:
[0185]
表2运动目标速度表。
[0186]
目标姿态速度大小静止状态0m/s低速状态100m/s中速状态500m/s高速状态1000m/s
[0187]
2)仿真结果及其分析
[0188]
目标在不同运动状态下,采用自适应pd控制器得到的跟踪控制仿真结果如图4
‑
图7所示。从上述仿真图中可以得到:
[0189]
图4中,当目标处于静止状态时,卫星经过12.8s的姿态调整后,能够维持稳定凝视状态,误差欧拉角稳定在0.001
°
以内,误差角速度稳定在0.001
°
/s以内,三轴的控制力矩在整个凝视过程中都在执行机构的输出范围内,未达到上限,其中,控制前期滚动轴和偏航轴的控制力矩较大,这是因为滚动轴和偏航轴的初始误差欧拉角和角速度较大,导致控制力矩较大;
[0190]
图5中,当目标处于低速状态时,卫星经过13.5的姿态调整后,能够维持稳定凝视状态,误差欧拉角稳定在0.005
°
以内,误差角速度稳定在0.006
°
/s以内,控制力矩在整个凝视过程中均在执行机构的输出范围内;
[0191]
图6中,当目标处于中速状态时,卫星经过16.8的姿态调整后,能够维持稳定凝视状态,误差欧拉角稳定在0.03
°
以内,误差角速度稳定在0.02
°
/s以内,控制力矩在整个凝视过程中均在执行机构的输出范围内;
[0192]
图7中,当目标处于高速状态时,卫星经过22.9的姿态调整后,能够维持稳定凝视状态,误差欧拉角稳定在0.05
°
以内,误差角速度稳定在0.04
°
/s以内,控制力矩在整个凝视过程中均在执行机构的输出范围内。
[0193]
综上所述,本发明设计的控制方法,均能保证稳定跟踪不同速度的运动目标,收敛速度较快,收敛曲线平滑,具有较好的鲁棒性,误差欧拉角和误差角速度都能保持在较小范围内,三轴的控制力矩在整个凝视过程中都未达到上限,此外,随着运动目标速度的不断增大,收敛速度变慢,误差欧拉角和误差角速度有所增加。
[0194]
因此可以得出结论,本发明设计的控制方法简单有效,能够实现视频卫星对不同运动速度的目标凝视跟踪,且均能保证控制收敛性,具有较好的鲁棒性。
[0195]
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1