一种电动舵机的制作方法
1.本实用新型属于电动舵机技术领域,具体涉及一种小型轻便的电动舵机。
背景技术:
2.电动舵机常作为飞行器控制系统中的执行部件,在航空领域已经广泛应用。目前无人机动力系统发动机节气门的控制多采用节气门底电动机构,体积较大且偏重,节气门阀门控制位置精度不高,影响无人机飞行状态,并且由于系统中空间位置有限,导致拆装困难。
3.现有电动舵机多采用反馈电位计采集输出位置,电位计是通过旋转改变阻值输出,其内部装有电阻片,电阻片有角度限制,因此旋转角度有限制,另外电位计只能以电阻阻值零点设置为位置“起点”。
技术实现要素:
4.本实用新型的目的在于提供一种电动舵机,其特点包括体积小、重量轻、拆装便捷、输出位置精度高(达到
±
0.05
°
以内)、可360
°
旋转无角度限制并任意设定其输出位置“起点”和“终点”,同时输出轴端采用简便一字槽型,能够直接与节气门控制阀连接,省去拉杆装置,能在有限空间满足安装要求。
5.本实用新型采用编码器采集输出位置,其原理是通过旋转上方空间的磁体产生周期空间变化磁场信号,转化为电阻值变化,经过信号转换处理实现编码器编码功能采集输出位置。编码器内部采用非接触式磁敏元件,所以采集输出位置可以360
°
旋转无角度限制。
6.本实用新型的技术方案为:
7.一种电动舵机,包括舵机壳体,所述舵机壳体内设置有输出轴、电机、减速机构、控制板、编码器和圆磁体,所述电机和输出轴通过减速机构相连,所述输出轴尾端连接圆磁体;所述控制板安装在舵机壳体内底部位置,位于电机与输出轴尾端正下方;所述编码器焊接在控制板上,位于圆磁体正下方;所述舵机壳体上设有安装板,所述舵机壳体外连接有连接器;所述连接器与控制板、所述控制板与电机之间通过导线连接。
8.进一步地,减速机构包括:多个逐级啮合的齿轮组件。
9.进一步地,齿轮组件包括:小齿轮(齿数少)与大齿轮(齿数多)同轴串联组合。
10.进一步地,输出轴轴端采用简便一字槽型,输出轴尾端粘接圆磁体。
11.所述圆磁体旋转时产生周期分布的空间漏磁场,编码器通过磁电阻效应将旋转变化的磁场信号转化为电阻值的变化,经过信号处理,识别出输出轴转动位置信息。
12.本实用新型优点在于:
13.(1)所述电动舵机内部采用集成化形式进行合理布局,将电机和输出轴之间通过减速机构并行联接,编码器集成到控制板上。
14.(2)外部通过输出轴采用一字槽型便捷的接口形式,可直接与被控部件连接,省去了拉杆装置,提高安装便捷性。
15.(3)位置反馈装置采用编码器,其有效分辨率可达14位,输出角度位置精度可高达
±
0.05
°
,同时编码器可采集360
°
旋转位置信息无角度限制,并根据需要任意设定其输出位置“起点”和“终点”。
16.(4)所述电动舵机实现了结构小型化,安装便捷化,输出位置具有可控性、精度高等特点,同时大大提升了电动舵机的应用范围。
附图说明
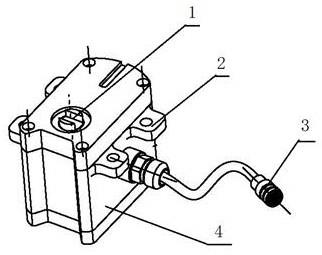
17.图1为本实用新型电动舵机的示意图;
18.图2为电动舵机内部结构剖视图;
19.图3为编码器原理示意图。
20.图中:1
‑
输出轴,2
‑
安装板,3
‑
连接器,4
‑
舵机壳体,5
‑
电机,6
‑
减速机构,7
‑
齿轮组件,8
‑
控制板,9
‑
编码器,10
‑
圆磁体。
具体实施方式
21.下面结合附图和实施例对本实用新型进行详细说明。
实施例
22.如图1
‑
2所,本实用新型公开了一种电动舵机,包括舵机壳体4,所述舵机壳体4内设置有输出轴1、电机5、减速机构6、控制板8、编码器9和圆磁体10,所述电机5和输出轴1通过减速机构6相连,所述输出轴1尾端粘接圆磁体10;所述控制板8安装在舵机壳体4内底部位置,位于电机5与输出轴1尾端正下方;所述编码器9焊接在控制板8上,位于圆磁体10正下方;所述舵机壳4体上设有安装板2,所述舵机壳体外连接有连接器3。
23.所述连接器3与控制板8、控制板8与电机5之间通过导线连接传递电信号与控制信号。
24.所述减速机构6包括多个逐级啮合的齿轮组件,将电机5与输出轴1并行联接。
25.所述输出轴1轴端采用一字槽型接口形式。
26.将电动舵机通过安装板2上的定位孔固定,将输出轴1轴端的一字槽直接与被控部件连接,控制板8通过连接器3接收舵角偏转目标值(可按需求任意设定),并采集舵角偏转当前值,根据偏差计算控制量输出pwm脉冲指令,该指令控制电机5转动,电机5转动通过减速机构6传递至输出轴1,带动输出轴1转到指令位置。
27.如图3所示,圆磁体10随输出轴1同步转动,产生周期分布的空间漏磁场,其下方编码器9通过磁电阻效应将旋转变化的磁场信号转化为电阻值的变化,经过信号处理,识别出舵角转动位置信息,反馈上传舵角偏转当前值。编码器9内部采用非接触式磁敏元件,所以采集输出位置可以360
°
旋转无角度限制。可以任意设至输出
ꢀ“
起点”和“终点”位置。
28.优选地,在本实用新型一个实施例中,编码器9采用角度编码器芯片mt6825,其有效分辨率可达14位(4096线),其输出角度精度高达
±
0.05
°
以内。
29.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围内,因此,本实用新型的保护范围应以所述权利
要求的保护范围为准。
技术特征:
1.一种电动舵机,包括舵机壳体,其特征在于:所述舵机壳体内设置有输出轴、电机、减速机构、控制板、编码器和圆磁体,所述电机和输出轴通过减速机构相连,所述输出轴尾端连接圆磁体;所述控制板安装在舵机壳体内底部位置,位于电机与输出轴尾端正下方;所述编码器焊接在控制板上,位于圆磁体正下方;所述舵机壳体上设有安装板,所述舵机壳体外连接有连接器;所述连接器与控制板、所述控制板与电机之间通过导线连接。2.根据权利要求1所述的电动舵机,其特征在于:所述减速机构包括多个逐级啮合的齿轮组件,将电机与输出轴并行联接。3.根据权利要求1所述的电动舵机,其特征在于:所述输出轴轴端采用一字槽型接口形式。4.根据权利要求1所述的电动舵机,其特征在于:所述编码器采用角度编码器芯片mt6825。
技术总结
本实用新型公开了一种电动舵机,包括舵机壳体,所述舵机壳体内设置有输出轴、电机、减速机构、控制板、编码器和圆磁体,所述电机和输出轴通过减速机构相连,所述输出轴尾端连接圆磁体;所述控制板安装在舵机壳体内底部位置,位于电机与输出轴尾端正下方;所述编码器焊接在控制板上,位于圆磁体正下方;所述舵机壳体上设有安装板,所述舵机壳体外连接有连接器;所述连接器与控制板、所述控制板与电机之间通过导线连接。所述电动舵机实现了结构小型化,安装便捷化,输出位置具有可控性、精度高等特点,同时大大提升了电动舵机的应用范围。同时大大提升了电动舵机的应用范围。同时大大提升了电动舵机的应用范围。
技术研发人员:黄周锋 彭虎 杨晓亮
受保护的技术使用者:南京航健航空装备技术服务有限公司
技术研发日:2020.12.25
技术公布日:2021/9/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1