一种新型太阳能无人机的制作方法
1.本实用新型属于无人机技术领域,具体涉及一种新型太阳能无人机。
背景技术:
2.自1974年“sunrise
‑ⅰ”
太阳能无人机问世以来,各国在太阳能无人机领域取得了多项突破。美国nasa致力于飞翼太阳能无人机研制,经历了“pathfinder”、“centurion”、“helios”等多个阶段,翼展从“pathfinder”的30.5m增大到“helios”的75.3m,“helios”在2003年试飞中达到了29.5km的最大飞行高度;瑞士联邦理工学院研发的“atlantiksolar”是一台重量只有6.8kg的小型太阳能无人机,该无人机于2016年7月完成长达26小时的难民搜救任务,全程无人工干预,为搜救团队及时反馈了重要信息;中国航天十一院研发的“彩虹”太阳能无人机具备20kg载荷能力,于2017年完成临近空间飞行试验,飞行高度超过20km;英国于2003年启动了“zephyr”系列太阳能无人机研制,2018年7月,“zephyr
‑
s”无人机创造了26天不间断巡航的新记录;uavos推出的“apusduo”太阳能无人机采用了串列翼布局,2018年5月,该公司宣布已顺利完成14米翼展原型机的飞行试验。近年来,越来越多国家和组织报道了各自的太阳能无人机研制情况,这些太阳能无人机呈现出飞行时间越来越长,载荷能力越来越强的特点。
3.但是现有技术中的无人机利用平尾产生的负升力进行纵向配平,气动效率受到限制。英国的“zephyr”系列无人机、中国的“彩虹”无人机、俄罗斯的“owl”无人机、意大利的“heliplat”无人机等均采用了常规布局。鸭式布局利用鸭翼产生的正升力来提供俯仰力矩,相比常规布局提高了气动效率,国内(科研类)全国航空航天模型锦标赛的赛场上曾出现过鸭式布局太阳能无人机,并取得了优异成绩,但由于鸭式布局本身不具有纵向静稳定性,遭遇复杂气流时控制难度大,所以在大型太阳能无人机中较为少见。串列翼布局的前后翼面均产生升力,具有气动效率高、结构刚性好的特点。uavos公司推出的apusduo无人机即采用了前下后上式的串列翼布局,该飞机利用布局优势克服了诸多气动弹性难题,于2018年完成首飞。飞翼布局利用反弯翼型实现机翼自配平,省去了平尾,相比常规布局而言具有更高的气动效率和更小的结构重量,但飞翼布局也具有纵向稳定性差,操控难度大的特点。
技术实现要素:
4.为了解决上述技术问题,本实用新型采取了如下技术方案:
5.一种新型太阳能无人机,包括机翼和控制仓,所述机翼的上表面设置有太阳能电池板,前缘设置有动力系统,末端设置有翼稍小翼;
6.所述机翼包括夹角连接设置的第一机翼和第二机翼,所述第二机翼与所述第一机翼的结构相同;所述控制仓设置在所述第一机翼和所述第二机翼的连接处;所述第一机翼和第二机翼均包括翼梁和多个翼肋,所述翼梁和所述翼肋的外侧包覆有蒙皮;所述翼梁为双梁式框架结构,所述翼肋用于支撑蒙皮、维持机翼的剖面形状。
7.进一步地,所述第一机翼和所述第二机翼均可通过折叠机构实现折叠。
8.进一步地,所述第一机翼和所述第二机翼均包括机翼主体和折叠翼,其中,所述折叠机构包括转轴铰链和驱动机构,所述机翼主体与所述折叠翼通过所述转轴铰链转动连接;
9.所述驱动机构包括连杆摇臂组件和蜗杆直线电机,所述蜗杆直线电机设置在所述机翼主体上,所述连杆摇臂组件包括连杆和摇臂,所述连杆的一端通过第一转轴与所述折叠翼转动连接,另一端通过销轴与所述摇臂转动连接;所述摇臂的另一端与所述所述蜗杆直线电机固定连接;所述摇臂通过第二转轴与所述机翼主体转动连接;
10.所述连杆摇臂组件将所述蜗杆直线电机的直线驱动运动转化为所述连杆摇臂组件的摆动,以实现所述折叠翼相对所述机翼主体转动180
°
折叠。
11.进一步地,所述第一机翼和所述第二机翼的上端均设置有提供刚性支撑的固定支架;所述固定支架与所述机翼之间通过多个电磁铁吸附装置可分离连接,以实现所述第一机翼、所述第二机翼与所述固定支架之间的固定和分离。
12.进一步地,所述固定支架与所述第一机翼的上表面、所述第二机翼的上表面贴合;
13.其中,所述折叠机构带动所述固定支架折叠,由所述固定支架带动所述折叠翼的展开或折叠。
14.进一步地,所述控制仓上端设置有上下布置且可分离的引导降落装置和滑翔装置;所述引导降落装置用于引导所述新型太阳能无人机在下落过程中实现匀速下降;滑翔装置用于将太阳能无人机的下落速度逐步转化为所述新型太阳能无人机的平飞速度。
15.进一步地,所述引导降落装置为引导伞包,所述滑翔装置为滑翔伞包。
16.进一步地,所述翼肋为拓扑式框架结构。
17.进一步地,所述翼稍小翼为碳纤维
‑
泡沫夹心式结构。
18.进一步地,所述蒙皮为柔性pe膜。
19.有益效果:
20.本实用新型与常规无人机相比,巡航高度高,飞行速度低,能实现定点巡查和不间断巡航;相比卫星,太阳能无人机造价低,维护成本低,可实施性高。
21.本实用新型的太阳能无人机除了具备太阳能无人机的上述固有优点外,可具有更强优势,可应用于以下几种战略场景:
22.(1)当需要对某区域进行持续侦查时,可以通过载机快速爬升至平流层,随后释放,省略了常规太阳能无人机的爬升段,更快进入任务状态。
23.(2)当作战区域发生变化时,可通过载机快速抵达作战空域后释放,而不必进行空中坐标转移,安全性和可实施性更高。
24.(3)放飞时,不需要考虑地面起飞条件,可以由载机从远程机场起飞后搭载该平台抵达飞行空域。
25.(4)可以实现定点多平台投放,通过战略协同,构建成“高空伪卫星网”。
附图说明
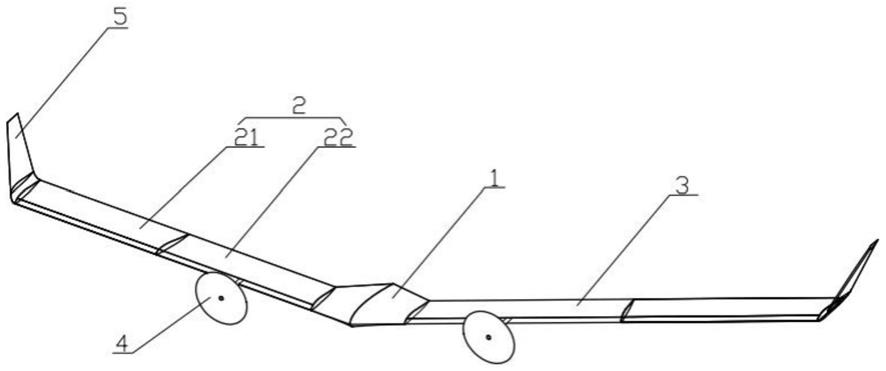
26.图1为太阳能无人机的初整体结构示意图;
27.图2为太阳能无人机的正视图;
28.图3为太阳能无人机的俯视图;
29.图4为太阳能无人机折叠后分解结构示意图
30.图5为太阳能无人机的引导降落装置打开后结构示意图
31.图6为太阳能无人机的引导降落装置、滑翔装置均打开后结构示意图
32.图7为太阳能无人机与固定支架脱离的结构示意图
33.图8为无人机的电磁铁吸附装置结构示意图
34.其中,1、控制仓;2、第一机翼;21、机翼主体;22、折叠翼;3、第二机翼;4、动力系统;5、翼稍小翼;6、固定支架;7、滑翔装置;8、引导降落装置;9、电磁铁;10、套管;11、钢制连接头;12、固定插销。
具体实施方式
35.实施例1
36.一种新型太阳能无人机,包括机翼和控制仓1,机翼的上表面设置有太阳能电池板,前缘设置有动力系统4,末端设置有翼稍小翼5;
37.机翼包括夹角连接设置的第一机翼2和第二机翼3,第二机翼3与第一机翼2的结构相同,控制仓1设置在第一机翼2和第二机翼3的连接处;第一机翼2和第二机翼3均包括翼梁和多个翼肋,翼梁和翼肋的外侧包覆有蒙皮;翼梁为双梁式框架结构,翼肋用于支撑蒙皮、维持机翼的剖面形状。
38.在本实施例中,翼肋为拓扑式框架结构,翼稍小翼5为碳纤维
‑
泡沫夹心式结构,蒙皮为柔性pe膜。
39.在本实施例中,第一机翼2和第二机翼3均可通过折叠机构实现折叠。
40.其中,第一机翼2和第二机翼3均包括机翼主体21和折叠翼22,折叠机构包括转轴铰链和驱动机构,机翼主体21与折叠翼22通过转轴铰链转动连接。
41.驱动机构包括连杆摇臂组件和蜗杆直线电机,蜗杆直线电机设置在机翼主体21上,连杆摇臂组件包括连杆和摇臂,连杆的一端通过转轴与折叠翼22转动连接,另一端通过销轴与摇臂一端转动连接;摇臂的另一端通过转轴与蜗杆直线电机固定连接;摇臂通过第二转轴与机翼主体21转动连接。本实施例中,摇臂为l型结构,第二转轴设置在摇臂的l型拐角处,当拖动摇臂一端时,摇臂旋转一定角度拖动连杆,以实现折叠翼22相对机翼主体21转动180
°
折叠。这属于本领域常规手段,其他折叠翼飞机中已经使用,在此不再赘述。
42.在本实施例中,第一机翼2和第二机翼3的上端均设置有提供刚性支撑的固定支架6;固定支架6与机翼之间通过多个电磁铁吸附装置可分离连接,以实现第一机翼2、第二机翼3与固定支架6之间的固定和分离。
43.其中,固定支架6与第一机翼2的上表面、第二机翼3的上表面贴合。固定支架6上设置有套管10,套管10内安装有电磁铁9;第一机翼2和第二机翼3的下端设置固定插销12,固定插销12与电磁铁9的吸合配合端设置有钢制连接头11。
44.在本实施例中,折叠机构带动固定支架6折叠,由固定支架6带动折叠翼22的展开或折叠。
45.其中,固定支架6单侧被分为铰接的三段。
46.在本实施例中,控制仓1上端设置有上下布置且可分离的引导降落装置8和滑翔装置7;引导降落装置8用于引导新型太阳能无人机在下落过程中实现匀速下降;滑翔装置7用
于将太阳能无人机的下落速度逐步转化为新型太阳能无人机的平飞速度。
47.引导降落装置8为引导伞包,滑翔装置7为滑翔伞包。
48.在本实施例中,控制仓1内设置有蓄电池、控制器和信号接收器,蓄电池与太阳能电池板电连接;控制器与蓄电池电连接,用于控制动力系统4的动力输出、电磁铁与固定销12之间的吸合,以及引导降落装置8、滑翔装置7的脱离和打开。
49.在本实施例中,动力系统4为螺旋桨。
50.本实用新型提供的一种新型太阳能无人机抛飞过程如下:
51.s10、由运输机、气球、飞艇等浮空器中的一种搭载太阳能无人机进入海拔高度12000m以上的高空。
52.s20、当运载装置的飞行高度达到预设抛飞高度后,运载装置将太阳能无人机释放抛飞。
53.s30、太阳能无人机被释放抛飞后,以自由态减速缓冲降落。
54.当太阳能无人机在平流层达到稳态后,引导降落装置8开启;引导降落装置8用于使太阳能无人机脱离自由落体状态,进入垂直方向的减速状态;
55.其中,稳态是指太阳能无人机的下落速度和平飞速度均达到预设值时。
56.当太阳能无人机在引导降落装置8的引导下达到匀速下降,同时平飞速度为零或接近零时,滑翔装置7开启;滑翔装置7用于将太阳能无人机的下落速度逐步转化为平飞速度。
57.当太阳能无人机的向前滑行速度和下落速度达到预设值时,太阳能无人机与引导降落装置8、滑翔装置7脱离;太阳能无人机开始巡航或爬升飞行。
58.其中,在步骤s10、步骤s20、步骤s30中,太阳能无人机为通过折叠机构机翼折叠后的状态。
59.在步骤s30中,太阳能无人机与引导降落装置8、滑翔装置7脱离前,折叠机构带动固定支架6,固定支架6带动太阳能无人机折叠的机翼展开,并通过折叠机构机构将太阳能无人机机翼结构状态固定。
60.在本实施例中,抛飞过程中,引导伞阻力系数取为3,下落速度取为10m/s,太阳能无人机(包含伞降系统和折叠机构)重量取为120kg,通过阻力公式,得到引导伞的直径为6.43m。在本实施例中,运输机释放太阳能无人机的高度为13000m,释放时平飞速度取为130m/s,进而可以对系统在空中的状态进行进一步分析和预测。
61.以上所述,仅是本实用新型较佳实施例而已,并非对本实用新型的技术范围作任何限制,故凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本实用新型技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1