一种测绘地理信息用测绘无人机的制作方法
1.本实用新型涉及无人机技术领域,具体来说涉及一种测绘地理信息用测绘无人机。
背景技术:
2.无人机顾名思义就是没有人驾驶的飞机,主要是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,一般是指在地面上通过相应的遥感设备进行控制工作,无人机的体积更小并且由于不需要人工驾驶,所以相应的使用安全性更加的高,能够代替人工进行更多方便并且安全的事情,随着科技不断的发展,无人机的应用已经非常广泛了,其中通过无人机与摄像设备的配合,能够进行各种工作,摄影、地质勘探、观察野生动物、监控以及各项工作都能够利用无人机与摄像设备配合完成,其中在进行地理信息收集的过程中,也会使用到无人机和相应设备配合完成工作,一般称之为测绘无人机。
3.现有的测绘无人机在使用的过程中主要是将测绘设备固定安装在无人机上,一般都通过螺丝连接,将测绘设备牢牢的固定在无人机上,这样的连接方式虽然结构比较简单,但是在实际拆装的过程中需要借助工具并且需要耗费一定的力气才能够完成拆装工作,比较的麻烦并且消耗人力,同时在使用的过程中,测绘设备的位置是固定不动的,无法进行相应的测绘角度调节工作,使得测绘设备在测绘的过程中使用非常的不灵活,同时现有的无人机在降落着陆的过程中没有很好的缓冲,易对无人机和测绘设备造成损伤。
技术实现要素:
4.鉴于现有技术存在的上述问题,本实用新型的一方面目的在于提供一种测绘地理信息用测绘无人机,旨在解决,现有的测绘无人机不能够很好的对测绘仪进行拆装工作,并且无法对测绘角度进行调节,着陆时会发生不稳定现象的问题。
5.技术方案
6.为了实现上述目的,本实用新型提供的一种测绘地理信息用测绘无人机,包括无人机和测绘仪,所述无人机的底面固定安装有安装座,所述安装座相邻底面一侧的内壁上设有转动机构,所述转动机构包括马达和转动杆,所述转动杆的外壁上固定安装有安装块,所述安装块与所述测绘仪相活动连接,驱动所述马达使得所述测绘仪沿转动杆保持弧线运动,所述无人机的底面对称安装有阻尼杆,所述阻尼杆的底面固定安装有连接板,所述连接板的底面固定安装有呈线性阵列分布的弹片。
7.作为优选,所述马达固定安装在所述安装座相邻底面一侧的内壁上,所述马达的输出端与所述转动杆相固定连接,所述转动杆的另一端转动连接于所述安装座一侧的内壁上,所述安装座相邻顶部一侧的内壁上固定安装有橡胶块。
8.作为优选,所述安装块的底面固定安装有螺纹杆a,所述测绘仪的顶部固定安装有连接杆,所述螺纹杆a与所述连接杆相螺纹连接固定,所述安装座两侧的外壁上均转动连接有支撑带,两个所述支撑带两端的外壁上均转动连接有转动板,两个所述转动板的外壁上
均固定安装有螺纹杆b,所述测绘仪两侧的外壁上均开设有螺纹槽,两个所述螺纹杆b分别与两个所述螺纹槽相配合螺纹连接固定。
9.作为优选,所述阻尼杆相邻底面一侧的外壁上缠绕有弹簧,所述连接板顶部两端的外壁上均彻底贯穿有移动杆,两个所述移动杆均滑动连接于所述连接板的内壁上,且底面固定安装有底板,所述弹片的另一端均固定安装在所述底板的顶部。
10.有益效果
11.与现有技术相比较,本实用新型提供的一种测绘地理信息用测绘无人机,具备以下有益效果:
12.1、该实用新型,通过螺纹杆a和连接杆之间的螺纹连接,使得测绘仪能够固定在无人机上,再利用安装座两侧的支撑带与测绘仪进行连接固定工作,增加测绘仪和无人机之间的连接点,使得测绘仪的固定更加的稳定牢固,保证高空使用的安全性。
13.2、该实用新型,通过转动机构的作用,能够在测绘过程中对测绘仪的放置角度进行相应的调节工作,使得测绘仪能够达到好的测绘角度和测绘效果,操作简单方便。
14.3、该实用新型,在弹簧、阻尼杆以及弹片的作用下,配合移动杆的滑动连接,能够在无人机着陆时,底板接触到地面后,能够非常稳定的停留在地面上,达到很好的缓冲目的,帮助无人机更好的着陆。
15.应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用于限制本公开。
16.本技术文件提供本公开中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
附图说明
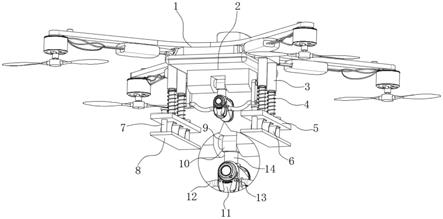
17.图1为本实用新型测绘仪和无人机安装后结构示意图;
18.图2为本实用新型无人机结构示意图;
19.图3为本实用新型测绘仪结构示意图;
20.图4为本实用新型安装座正视角剖面结构示意图。
21.主要附图标记:
22.1、无人机;2、安装座;3、阻尼杆;4、弹簧;5、连接板;6、弹片;7、移动杆;8、底板;9、转动杆;10、安装块;11、测绘仪;12、支撑带;13、转动板;14、连接杆;15、螺纹杆a;16、螺纹杆b;17、螺纹槽;18、马达;19、橡胶块;20、转动机构。
具体实施方式
23.为了使得本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
24.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“包括”或者“包含”等类似的词语意
指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,还可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
25.为了保持本公开实施例的以下说明清楚且简明,本公开省略了已知功能和已知部件的详细说明。
26.请参阅图1
‑
4,一种测绘地理信息用测绘无人机,包括无人机1和测绘仪11,在进行无人机1进行测绘工作的过程中,将需要进行安装的测绘仪11准备好,通过螺纹杆a15和连接杆14之间的螺纹连接结构,将测绘仪11和无人机1连接在一起,为了保证测绘仪11安装的牢固性,将安装座2两侧的支撑带12通过转动转动板13,使得螺纹杆b16能够与螺纹槽17相螺纹连接固定,增加测绘仪11与无人机1之间连接的连接处,保证连接的牢固性和稳定性,无人机1启动之后,在空中进行测绘的过程中,为了保证测绘工作的全面性,启动马达18,马达18能够带动固定安装在转动杆9上的测绘仪11进行弧线运动,从而使得测绘仪11在空间测绘时能够适当的更改测绘角度,达到好的测绘目的,在无人机1进行着陆工作时,在碰触在地面的过程中,在弹片6、弹簧4以及阻尼杆3的共同作用下底板8在触碰到地面时,即使地面不够平整,也能够在一端受力的情况下,保持无人机1整体的稳定,着陆得到缓冲,对测绘仪11能够提供很好的保护能力。
27.如图1、图2和图3所示,本实用新型进一步提出的技术方案中,无人机1的底面固定安装有安装座2,安装座2相邻底面一侧的内壁上设有转动机构20,转动机构20包括马达18和转动杆9,转动杆9的外壁上固定安装有安装块10,安装块10与测绘仪11相活动连接,驱动马达18使得测绘仪11沿转动杆9保持弧线运动,无人机1的底面对称安装有阻尼杆3,阻尼杆3的底面固定安装有连接板5,连接板5的底面固定安装有呈线性阵列分布的弹片6,通过转动机构20的作用,能够在对无人机1进行航线控制时也能够对测绘仪11的测绘角度进行适当的调整工作,达到好的测绘目的。
28.其中,安装块10的底面固定安装有螺纹杆a15,测绘仪11的顶部固定安装有连接杆14,螺纹杆a15与连接杆14相螺纹连接固定,安装座2两侧的外壁上均转动连接有支撑带12,两个支撑带12两端的外壁上均转动连接有转动板13,两个转动板13的外壁上均固定安装有螺纹杆b16,测绘仪11两侧的外壁上均开设有螺纹槽17,两个螺纹杆b16分别与两个螺纹槽17相配合螺纹连接固定,通过简单的螺纹连接结构,使得测绘仪11在与无人机1安装连接的过程中,有多个连接固定点,使得测绘仪11在安装时能够更加的牢固并且稳定。
29.其中,阻尼杆3相邻底面一侧的外壁上缠绕有弹簧4,连接板5顶部两端的外壁上均彻底贯穿有移动杆7,两个移动杆7均滑动连接于连接板5的内壁上,且底面固定安装有底板8,弹片6的另一端均固定安装在底板8的顶部,在弹簧4、阻尼杆3以及弹片6的作用下,配合移动杆7的滑动连接,能够在无人机1着陆时达到很好的缓冲目的,帮助无人机1更好的着陆。
30.如图4所示,本实用新型进一步提出的技术方案中,马达18固定安装在安装座2相邻底面一侧的内壁上,马达18的输出端与转动杆9相固定连接,转动杆9的另一端转动连接于安装座2一侧的内壁上,安装座2相邻顶部一侧的内壁上固定安装有橡胶块19,通过马达18直接控制转动杆9进行相应的转动工作,从而带动固定安装在转动杆9上的安装块10转
动,则能够达到测绘仪11测绘角度调整的目的。
31.工作原理:
32.1、通过螺纹杆a15和连接杆14之间的螺纹连接结构,将测绘仪11和无人机1连接在一起,为了保证测绘仪11安装的牢固性,将安装座2两侧的支撑带12通过转动转动板13,使得螺纹杆b16能够与螺纹槽17相螺纹连接固定,增加测绘仪11与无人机1之间连接的连接处,保证连接的牢固性和稳定性。
33.2、启动马达18,马达18能够带动固定安装在转动杆9上的测绘仪11进行弧线运动,从而使得测绘仪11在空间测绘时能够适当的更改测绘角度,在弹片6、弹簧4以及阻尼杆3的共同作用下底板8在触碰到地面时,即使地面不够平整,也能够在一端受力的情况下,保持无人机1整体的稳定,着陆得到缓冲。
34.该文提及的弹簧4,其弹性系数符合本实用新型技术方案的技术要求。
35.该文中出现的电器元件均与外界的主控器及蓄电池电性连接,并且主控器可为计算机等起到控制的常规已知设备。
36.以上实施例仅为本实用的示例性实施例,不用于限制本实用,本实用的保护范围由权利要求书限定。本领域技术人员可以在本实用的实质和保护范围内,对本实用做出各种修改或等同替换,这种修改或等同替换也应视为落在本实用的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1