一种排爆无人机的制作方法
1.本发明涉及无人机应用领域,特别涉及一种排爆无人机。
背景技术:
2.由于国际形势的改变,现在世界面临的反恐斗争的压力与日俱增,恐怖分子已经不再满足传统意义上的小规模游击战的偷袭方式,转而使用科技手段进行恐怖袭击,较为常见的是利用各种炸弹为主要攻击武器的模式。由于炸弹杀伤力大,技术门槛低,成本低,并且能够引起公众的极大恐慌。
3.传统的排爆工作主要由排爆手担任,这种排爆的方式危险性很高,排爆手的人生安全难以得到保障。因此催生出了排爆机器人的出现,排爆机器人能够进行实地勘察,实时传输现场图像,并将可疑爆炸物进行销毁或转移,避免不必要的人员伤亡。
4.然而,排爆机器人受地形的限制大,排爆工作较为困难;再有,排爆机器人移动困难,跨越障碍的能力有限,不方便转移可疑爆炸物,难以进行排爆工作。
5.排爆无人机是一种用于排除炸弹的,能够弥补排爆机器人存在的不足,然而,平常的排爆无人机主要用于侦察,排爆能力较弱。
技术实现要素:
6.本发明要解决的技术问题是提供一种排爆无人机,该排爆无人机便于受地形限制小,跨越能力强,方便移动可疑爆炸物,便于进行排爆工作,而且,其排爆能力强,便于侦察机排除炸弹。
7.为了解决上述技术问题,本发明的方案为:
8.一种排爆无人机,包括无人机主体及操作手柄,所述无人机主体上设置有摄像模块,炸弹探测模块及第一数据接收发射模块,所述无人机主体底部固定设置有容纳盒及排爆装置,所述操作手柄上配置有与所述第一数据接收发射器连接的第二数据接收发射器,所述第二数据接收发射器连通有方向调节模块,升降调节模块及数据分析执行模块,所述排爆装置包括固定设置在所述无人机主体下方的液压曲臂,及所述液压曲臂下方配置的排爆钳,所述排爆钳一端设置有钳口及剪刀口,另一端设置有撬杠头及铲子,所述无人机主体设置有能够进行升降调节的支撑脚。
9.所述无人机主体上设置有方向调节电机,所述方向调节电机的输出轴上固定设置有竖立杆,所述竖立杆上固定设置有平衡调节叶片。
10.所述摄像模块包括与所述第一数据接收发射器连接的摄像头。
11.所述炸弹探测模块包括与所述第一数据接收发射器连接的炸弹探测探头。
12.所述方向调节模块包括前后左右调节键。
13.所述升降调节模块包括升降调节键。
14.所述数据分析执行模块包括显示器及控制调节键,所述显示器及控制调节键与所述第二数据接收发射器连通。
15.与现有技术相比,本发明的有益效果为:
16.本申请中,当控制本申请无人机移动至炸弹雷区时,首先摄像模块进行观察,并将现场场景显示在显示器上,同时,通过炸弹探测模块探查炸弹的位置,以便于方便拆除炸弹,当查探到炸弹位置后,通过方向调节模块及升降调节模块控制本申请无人机移动至相应位置,之后通过数据分析执行模块对排爆装置进行控制,通过控制撬杠头可以松土,通过控制铲子可以进行铲土,将炸弹暴露出来,随后通过控制钳口可以进行相关零件的拆除,通过控制剪刀口将炸弹线路进行剪除拆掉,拆除的物料可以放置在容纳盒内部。当地面不平时,通过控制支撑脚进行伸缩调节,使本申请无人机处于稳定状态。当需要移动时,重新启动本申请无人机,即可移动并带走相应的物品。本申请排爆无人机便于受地形限制小,跨越能力强,方便移动可疑爆炸物,便于进行排爆工作,而且,其排爆能力强,便于侦察机排除炸弹。
附图说明
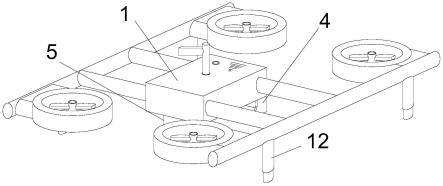
17.图1为本发明的结构示意图;
18.图2为本发明的排爆无人机的侧视图;
19.图3为本发明的操作手柄的结构示意图;
20.图4为本发明排爆钳的结构示意图;
21.图5为本发明方向调节电机的结构示意图。
具体实施方式
22.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
23.如图1-5所示,一种排爆无人机,包括无人机主体1及操作手柄2,所述无人机主体1上设置有摄像模块3,炸弹探测模块及第一数据接收发射模块,所述无人机主体1底部固定设置有容纳盒4及排爆装置5,所述操作手柄2上配置有与所述第一数据接收发射器连接的第二数据接收发射器,所述第二数据接收发射器连通有方向调节模块,升降调节模块及数据分析执行模块,所述排爆装置5包括固定设置在所述无人机主体1下方的液压曲臂6,及所述液压曲臂6下方配置的排爆钳7,所述排爆钳7一端设置有钳口8及剪刀口9,另一端设置有撬杠头10及铲子11,所述无人机主体1设置有能够进行升降调节的支撑脚12。
24.所述无人机主体1上设置有方向调节电机13,所述方向调节电机13的输出轴上固定设置有竖立杆14,所述竖立杆14上固定设置有平衡调节叶片15。该设置主要是用于通过旋转平衡调节叶片进行调节无人机主体1的重量偏侧方向,进而保证重量的平衡,保证无人机主体1平稳。
25.所述摄像模块3包括与所述第一数据接收发射器连接的摄像头。该设置主要是用于摄像,方便本申请无人机观察现场情况。
26.所述炸弹探测模块包括与所述第一数据接收发射器连接的炸弹探测探头。该设置主要是便于探查炸弹位置,以便于排除炸弹。
27.所述方向调节模块包括前后左右调节键16。该设置主要是便于调节本申请无人机
的前后左右移动方向。
28.所述升降调节模块包括升降调节键17。该设置主要是便于本申请无人机的升降高度。
29.所述数据分析执行模块包括显示器18及控制调节键19,所述显示器18及控制调节键19与所述第二数据接收发射器连通。该设置主要是便于显示观察及控制排爆装置进行排爆操作。
30.本申请中,当控制本申请无人机移动至炸弹雷区时,首先摄像模块3进行观察,并将现场场景显示在显示器18上,同时,通过炸弹探测模块探查炸弹的位置,以便于方便拆除炸弹,当查探到炸弹位置后,通过方向调节模块及升降调节模块控制本申请无人机移动至相应位置,之后通过数据分析执行模块对排爆装置5进行控制,通过控制撬杠头10可以松土,通过控制铲子11可以进行铲土,将炸弹暴露出来,随后通过控制钳口8可以进行相关零件的拆除,通过控制剪刀口9将炸弹线路进行剪除拆掉,拆除的物料可以放置在容纳盒4内部。当地面不平时,通过控制支撑脚12进行伸缩调节,使本申请无人机处于稳定状态。当需要移动时,重新启动本申请无人机,即可移动并带走相应的物品。本申请排爆无人机便于受地形限制小,跨越能力强,方便移动可疑爆炸物,便于进行排爆工作,而且,其排爆能力强,便于侦察机排除炸弹。
31.以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
技术特征:
1.一种排爆无人机,其特征在于:包括无人机主体(1)及操作手柄(2),所述无人机主体(1)上设置有摄像模块(3),炸弹探测模块及第一数据接收发射模块,所述无人机主体(1)底部固定设置有容纳盒(4)及排爆装置(5),所述操作手柄(2)上配置有与所述第一数据接收发射器连接的第二数据接收发射器,所述第二数据接收发射器连通有方向调节模块,升降调节模块及数据分析执行模块,所述排爆装置(5)包括固定设置在所述无人机主体(1)下方的液压曲臂(6),及所述液压曲臂(6)下方配置的排爆钳(7),所述排爆钳(7)一端设置有钳口(8)及剪刀口(9),另一端设置有撬杠头(10)及铲子(11),所述无人机主体(1)设置有能够进行升降调节的支撑脚(12)。2.根据权利要求1所述的排爆无人机,其特征在于:所述无人机主体(1)上设置有方向调节电机(13),所述方向调节电机(13)的输出轴上固定设置有竖立杆(14),所述竖立杆(14)上固定设置有平衡调节叶片(15)。3.根据权利要求1所述的排爆无人机,其特征在于:所述摄像模块(3)包括与所述第一数据接收发射器连接的摄像头。4.根据权利要求1所述的排爆无人机,其特征在于:所述炸弹探测模块包括与所述第一数据接收发射器连接的炸弹探测探头。5.根据权利要求1所述的排爆无人机,其特征在于:所述方向调节模块包括前后左右调节键(16)。6.根据权利要求1所述的排爆无人机,其特征在于:所述升降调节模块包括升降调节键(17)。7.根据权利要求1所述的排爆无人机,其特征在于:所述数据分析执行模块包括显示器(18)及控制调节键(19),所述显示器(18)及控制调节键(19)与所述第二数据接收发射器连通。
技术总结
本发明公开了一种排爆无人机,包括无人机主体及操作手柄,无人机主体上设置有摄像模块,炸弹探测模块及第一数据接收发射模块,无人机主体底部固定设置有容纳盒及排爆装置,操作手柄上配置有与第一数据接收发射器连接的第二数据接收发射器,第二数据接收发射器连通有方向调节模块,升降调节模块及数据分析执行模块,排爆装置包括固定设置在无人机主体下方的液压曲臂,及液压曲臂下方配置的排爆钳,排爆钳一端设置有钳口及剪刀口,另一端设置有撬杠头及铲子,无人机主体设置有能够进行升降调节的支撑脚。本申请排爆无人机便于受地形限制小,跨越能力强,方便移动可疑爆炸物,便于进行排爆工作,而且,其排爆能力强,便于侦察机排除炸弹。炸弹。炸弹。
技术研发人员:张春林 赵美艳 郝西权 张津洋 商智凯 商志友
受保护的技术使用者:中政国泰(北京)信息科技有限公司
技术研发日:2022.03.04
技术公布日:2022/6/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1