一种基于手势控制的无人机
1.本发明涉及无人机技术领域,涉及一种基于手势控制的无人机。
背景技术:
2.随着无人机科技的发展与时代的前进,无人机的诸多优势愈发明显,在航拍、测绘、巡检、消防乃至军事侦查等诸多领域中大显身手,而相较于当前研究较多的无人机室外操控,室内操控复杂性、不确定性更高,对于高精度越障有较严格的要求,因此也较为少见,此外现有的主要操控技术仍是用带手柄遥控器控制无人机的起降、爬升、平飞等动作,但是现有的一些无人机,遥控器的体积较大,较为笨重,本身无人机的携带就已不便,再携带大型的遥控器显得更为不易,而且需要的上手时间偏长,使用者需要较长一段时间的学习才能够了解各控制杆位所代表的动作,并且需要多次飞行才可以逐渐熟悉操作和飞行速度的快慢规律,操作不够方便,而且降落时无人机支撑不够稳定,为此,我们提出了一种基于手势控制的无人机。
技术实现要素:
3.本发明要解决的技术问题是克服现有的缺陷,本发明提出了一种基于手势控制的无人机,能够通过手势对无人机进行操控,操控更加方便,无人机的飞行更加安全,无人机降落时支撑范围更大,从而有效保证无人机的平稳降落,大大提高了无人机的使用寿命,可以有效解决背景技术中的问题。
4.为实现上述目的,本发明提供如下技术方案:一种基于手势控制的无人机,包括机架和支撑机构;
5.机架:其外侧端头四角的上表面均匀设置有电机,电机的输出轴上端均设有叶片,机架的上表面中部设有飞行控制器,机架的下端均与底板固定连接,底板的上表面分别设置有图片传输器、微型电脑和电池,底板的下表面前端通过u型架安装有相机,飞行控制器和微型电脑的输入端均电连接电池的输出端,相机和电机的输入端均电连接飞行控制器的输出端,相机的输出端电连接图片传输器的输入端,图片传输器的输出端电连接微型电脑的输入端,微型电脑和飞行控制器双向电连接;
6.支撑机构:对称设置于底板的下表面,能够通过手势对无人机进行操控,操控更加方便,无人机的飞行更加安全,无人机降落时支撑范围更大,从而有效保证无人机的平稳降落,大大提高了无人机的使用寿命。
7.进一步的,所述机架的上表面中部均匀设置有圆杆,圆杆的上端均与顶板的下表面固定连接,顶板的上表面设有激光雷达,激光雷达的输出端电连接飞行控制器的输入端,能够对无人机周围的环境进行实时监测。
8.进一步的,所述顶板的上表面设有gps定位器,gps定位器的输出端电连接飞行控制器的输入端,能够实时监测无人机飞行的位置信息。
9.进一步的,所述机架的力臂采用尼龙和玻纤复合的力臂,顶板采用碳纤维板体,底
板采用沉金pcb板体,大大降低了无人机的重量。
10.进一步的,所述支撑机构包括转轴、销轴、折杆、扭簧和支架,所述转轴左右对称转动连接于底板的下端,转轴的中部均固定套设有扭簧,扭簧的外侧端头均与底板的下表面固定连接,转轴的两端均设有折杆,折杆的上端均与底板的下表面接触,折杆的下端均通过销轴转动连接有支架,销轴与对应的支架固定连接,销轴均与转轴垂直设置,保证无人机的平稳降落。
11.进一步的,所述支架的个数为四个,四个支架的下端均设有万向轮,将支架与地面的摩擦力。
12.进一步的,还包括套筒,所述套筒位于前后对应的两个支架之间,套筒的内部均对称滑动连接有插杆,位于同一个套筒内部的两个插杆通过弹簧连接,插杆的外侧端头分别与同侧对应的支架中部转动连接,对支架的纵向位置起到弹性支撑作用。
13.进一步的,所述销轴的外侧端头均设有弧形拨片,底板的左右侧面均对称设置有与弧形拨片配合的限位轴,方便拨动支架以销轴为中心进行转动。
14.进一步的,所述机架的外侧面四角均匀设有橡胶缓冲杆,四个橡胶缓冲杆的外侧端头均与防撞环的内壁固定连接,防撞环的外侧面设有橡胶垫,能够有效避免电机上端的叶片与外部物体发生碰撞。
15.与现有技术相比,本发明的有益效果是:本基于手势控制的无人机,具有以下好处:
16.1、通过外部手势传感器识别操作人员的手势,手势传感器将识别到的指令通过地面pc端发出,然后底板上端的微型电脑接收到指令并将指令发送至机架上表面中部的飞行控制器,然后飞行控制器控制机架外侧对应的电机工作,使电机上端的叶片高速转动,从而使无人机工作,同时相机将拍摄到的画面通过图片传输器传输至微型电脑,微型电脑再将画面反馈至地面pc端,同时gps定位器能够实时监测无人机飞行的位置信息,并将飞行数据通过飞行控制器反馈至微型电脑,微型电脑再将飞行数据反馈至地面pc端,从而方便对无人机进行操控,激光雷达能够对无人机周围的环境进行实时监测,并通过飞行控制器和微型电脑反馈至地面pc端,保证无人机飞行的安全,操控更加方便。
17.2、当无人机降落时,支架下端的万向轮先于地面接触,此时在无人机的重力和下落的冲击力作用下,位于同一个转轴端头的折杆和支架以转轴为中心向外转动,扭簧受力发生形变,而支架在以转轴为中心转动的同时,销轴外侧的拨片与对应的限位轴接触,因为拨片为倾斜设置,所以拨片与限位轴接触时能够使拨片发生角度变化,进而通过销轴带动对应的支架以销轴为中心向外转动,同时套筒内部的两个插杆相向滑动,弹簧被拉伸,从而使支架的支撑范围更大,保证无人机的平稳降落。
18.3、防撞环和橡胶垫能够有效避免电机上端的叶片与外部物体发生碰撞,大大提高了无人机的使用寿命。
附图说明
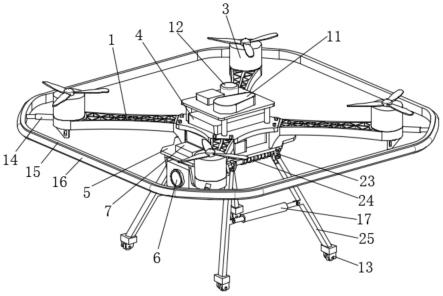
19.图1为本发明结构示意图;
20.图2为本发明内部结构示意图;
21.图3为本发明a处放大结构示意图;
22.图4为本发明套筒的内部结构示意图。
23.图中:1机架、2支撑机构、21转轴、22销轴、221弧形拨片、23折杆、24扭簧、25支架、3电机、4飞行控制器、5底板、6相机、7图片传输器、8微型电脑、9电池、10顶板、11激光雷达、12gps定位器、13万向轮、14橡胶缓冲杆、15防撞环、16橡胶垫、17套筒、171插杆、172弹簧、18限位轴。
具体实施方式
24.下面结合附图与具体实施方式对本发明作进一步详细描述:
25.请参阅图1-4,本发明提供一种技术方案:一种基于手势控制的无人机,包括机架1和支撑机构2;
26.机架1:其外侧端头四角的上表面均匀设置有电机3,电机3的输出轴上端均设有叶片,机架1的上表面中部设有飞行控制器4,机架1的下端均与底板5固定连接,底板5的上表面分别设置有图片传输器7、微型电脑8和电池9,底板5的下表面前端通过u型架安装有相机6,飞行控制器4和微型电脑8的输入端均电连接电池9的输出端,相机6和电机3的输入端均电连接飞行控制器4的输出端,相机6的输出端电连接图片传输器7的输入端,图片传输器7的输出端电连接微型电脑8的输入端,微型电脑8和飞行控制器4双向电连接,机架1的上表面中部均匀设置有圆杆,圆杆的上端均与顶板10的下表面固定连接,顶板10的上表面设有激光雷达11,顶板10的上表面设有gps定位器12,gps定位器12和激光雷达11的输出端电连接飞行控制器4的输入端,通过外部手势传感器识别操作人员的手势,手势传感器将识别到的指令通过地面pc端发出,然后底板5上端的微型电脑8接收到指令并将指令发送至机架1上表面中部的飞行控制器4,然后飞行控制器4控制机架1外侧对应的电机3工作,使电机3上端的叶片高速转动,从而使无人机工作,同时相机6将拍摄到的画面通过图片传输器7传输至微型电脑8,微型电脑8再将画面反馈至地面pc端,同时gps定位器12能够实时监测无人机飞行的位置信息,并将飞行数据通过飞行控制器4反馈至微型电脑8,微型电脑8再将飞行数据反馈至地面pc端,从而方便对无人机进行操控,激光雷达11能够对无人机周围的环境进行实时监测,并通过飞行控制器4和微型电脑8反馈至地面pc端,保证无人机飞行的安全;
27.支撑机构2:对称设置于底板5的下表面,支撑机构2包括转轴21、销轴22、折杆23、扭簧24和支架25,转轴21左右对称转动连接于底板5的下端,转轴21的中部均固定套设有扭簧24,扭簧24的外侧端头均与底板5的下表面固定连接,转轴21的两端均设有折杆23,折杆23的上端均与底板5的下表面接触,折杆23的下端均通过销轴22转动连接有支架25,销轴22与对应的支架25固定连接,销轴22均与转轴21垂直设置,支架25的个数为四个,四个支架25的下端均设有万向轮13,还包括套筒17,套筒17位于前后对应的两个支架25之间,套筒17的内部均对称滑动连接有插杆171,位于同一个套筒17内部的两个插杆171通过弹簧172连接,插杆171的外侧端头分别与同侧对应的支架25中部转动连接,销轴22的外侧端头均设有弧形拨片221,底板5的左右侧面均对称设置有与弧形拨片221配合的限位轴18,当无人机降落时,支架25下端的万向轮13先于地面接触,此时在无人机的重力和下落的冲击力作用下,位于同一个转轴21端头的折杆23和支架25以转轴21为中心向外转动,扭簧24受力发生形变,而支架25在以转轴21为中心转动的同时,销轴22外侧的拨片221与对应的限位轴18接触,因为拨片221为倾斜设置,所以拨片221与限位轴18接触时能够使拨片221发生角度变化,进而
通过销轴22带动对应的支架25以销轴22为中心向外转动,同时套筒17内部的两个插杆171相向滑动,弹簧172被拉伸,从而使支架25的支撑范围更大,保证无人机的平稳降落。
28.其中:机架1的力臂采用尼龙和玻纤复合的力臂,顶板10采用碳纤维板体,底板5采用沉金pcb板体,降低无人机的整体重量。
29.其中:机架1的外侧面四角均匀设有橡胶缓冲杆14,四个橡胶缓冲杆14的外侧端头均与防撞环15的内壁固定连接,防撞环15的外侧面设有橡胶垫16,能够有效避免电机3上端的叶片与外部物体发生碰撞,大大提高了无人机的使用寿命。
30.在使用时:通过外部手势传感器识别操作人员的手势,手势传感器将识别到的指令通过地面pc端发出,然后底板5上端的微型电脑8接收到指令并将指令发送至机架1上表面中部的飞行控制器4,然后飞行控制器4控制机架1外侧对应的电机3工作,使电机3上端的叶片高速转动,从而使无人机工作,同时相机6将拍摄到的画面通过图片传输器7传输至微型电脑8,微型电脑8再将画面反馈至地面pc端,同时gps定位器12能够实时监测无人机飞行的位置信息,并将飞行数据通过飞行控制器4反馈至微型电脑8,微型电脑8再将飞行数据反馈至地面pc端,从而方便对无人机进行操控,激光雷达11能够对无人机周围的环境进行实时监测,并通过飞行控制器4和微型电脑8反馈至地面pc端,保证无人机飞行的安全,当无人机降落时,支架25下端的万向轮13先于地面接触,此时在无人机的重力和下落的冲击力作用下,位于同一个转轴21端头的折杆23和支架25以转轴21为中心向外转动,扭簧24受力发生形变,而支架25在以转轴21为中心转动的同时,销轴22外侧的拨片221与对应的限位轴18接触,因为拨片221为倾斜设置,所以拨片221与限位轴18接触时能够使拨片221发生角度变化,进而通过销轴22带动对应的支架25以销轴22为中心向外转动,同时套筒17内部的两个插杆171相向滑动,弹簧172被拉伸,从而使支架25的支撑范围更大,保证无人机的平稳降落,防撞环15和橡胶垫16能够有效避免电机3上端的叶片与外部物体发生碰撞,大大提高了无人机的使用寿命。
31.值得注意的是,本实施例中所公开的电机3、飞行控制器4、相机6、图片传输器7、gps定位器12、微型电脑8和激光雷达11均可根据实际应用场景自由配置,电机3建议选用型号为a2212kv980的无刷电机,飞行控制器4建议选用pixhawk飞行控制器,相机6建议选用fpv广角彩色700线ccd摄像头,图片传输器7建议选用ts832大功率图片传输器,gps定位器12建议选用m8n gps定位器,微型电脑8建议选用树莓派4b,激光雷达11建议选用a1激光雷达,微型电脑8控制电机3、相机6、图片传输器7、gps定位器12、和激光雷达11工作采用现有技术中常用的方法。
32.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1