一种无人直升机起落架的制作方法
1.本实用新型属于无人机技术领域,具体涉及一种无人直升机起落架。
背景技术:
2.综合电子试验舰是舰载作战指挥系统和综合电子战系统的测试平台,在综合电子试验舰中无人直升机是重要组成部分,无人直升机可以执行电子干扰、空中搜索、海面监视、侦察等任务,现有舰载的无人直升机在不使用时常存放在舰船的机库中,需要使用时则推到甲板上准备执行任务,无人直升机的重量一般在100kg以上,移动不便,移动时一般需要吊装或者使用承载式滑动板来拖动,吊装作用需要使用克令吊,受限较大,承载式滑动板需要多人配合且从无人直升机腹部承托时误操作容易损坏无人机机身,不利于在舰船环境使用。
技术实现要素:
3.技术问题:针对现有技术中存在的上述问题,本实用新型所要解决的技术问题在于提供一种无人直升机起落架方便无人直升机在舰船移动。
4.技术方案:为了解决上述技术问题,本实用新型采用的技术方案如下:
5.一种无人直升机起落架,其特征在于,包括与无人直升机机架连接的第一支架、与所述第一支架对称设置的第二支架以及将所述第一支架和第二支架连接的连接杆,所述第一支架和第二支架分别包括两个或两个以上的支撑杆、与所述支撑杆连接的横杆以及与所述支撑杆连接并用于接触地面的滑撬管,所述支撑杆上设有支撑板,所述支撑板上可拆卸连接有升降支撑腿。
6.优选的,所述滑撬管包括弯管、直管和三通接头,所述弯管和直管通过三通接头与所述支撑杆连接。
7.优选的,所述支撑板上设有滑槽,所述升降支撑腿包括与所述滑槽滑动连接的底板、设置在所述底板上的液压油缸、与所述液压油缸活动连接的活塞杆和设置在活塞杆上的滚轮。
8.优选的,所述支撑板上设有贯穿所述滑槽的第一通孔,所述底板与第一通孔对应位置设有第二通孔,所述支撑板上设有贯穿第一通孔和第二通孔的定位栓。
9.优选的,所述液压油缸上连接有用于驱动活塞杆的手动驱动杆和设置在手动驱动杆上的套筒,所述套筒用于连接加长握杆。
10.优选的,所述连接杆与支撑杆连接,且所述连接杆数量在一个以上。
11.有益效果:与现有技术相比,本实用新型具有以下优点:1、通过设置支撑板和升降支撑腿可以将无人直升机顶起,并在升降支撑腿上设置滚轮,可推动无人直升机到指定位置,单人便可完成无人直升机的移动工作,对无人直升机无损伤风险且工作量小,极大方便了舰船上无人直升机的移动,提高无人直升机工作效率;2、滑撬管采弯管、直管和三通接头连接,结构简单、成本低且方便维护换新。
附图说明
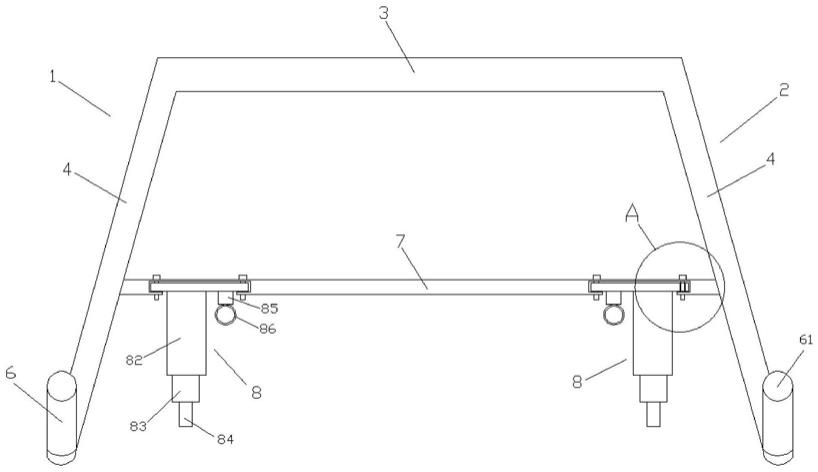
12.图1是本实用新型实施例主视结构示意图;
13.图2是图1中a处放大图;
14.图3是第二支架侧视结构示意图;
15.图4是支撑板部分结构俯视示意图;
16.图5是起落架框架结构示意图。
具体实施方式
17.下面结合具体实施例,进一步阐明本发明,实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
18.如图1、图3和图5所示,一种无人直升机起落架,包括第一支架1、第二支架2和连接杆3,第一支架1和第二支架2对称设置,并向上延伸用来连接在与无人直升机机架上,第一支架1和第二支架2通过两个横向设置的连接杆3连接,第一支架1和第二支架分别包括两个倾斜设置的支撑杆4、将两个支撑杆4连接的横杆5以及滑撬管6,滑撬管6与两个支撑杆4的下端连接,在无人直升机降落时滑撬管6用于接触地面。
19.如图1、图2和图3所示,滑撬管6包括弯管61、直管62和三通接头63,弯管61设置有两个,通过三通接头63连接在直管62的两端,连接后的弯管61和直管62通过三通接头63的另一个接口与支撑杆4连接,结构简单、成本低且方便维护换新。
20.如图1、图2、图3和图4所示,每个支撑杆4上设置有支撑板7,两个支架相邻的支撑杆4上支撑板7连接成一个整板,支撑板7上连接有升降支撑腿8,4个支撑杆4共设有4个升降支撑腿8用于支撑无人直升机,支撑板7上设有滑槽71和两个贯穿滑槽71的第一通孔711,升降支撑腿8包括底板81、液压油缸82、活塞杆83和滚轮84,在液压油缸82工作时活塞杆83向下伸长,从而将无人直升机顶起,在滚轮84作用下可推动无人直升机到指定位置。底板81与滑槽71滑动连接,可以滑进或滑出滑槽71,底板81与第一通孔711对应位置设有第二通孔811,当底板81滑进滑槽71内时,第二通孔811和第一通孔711在一条直线,支撑板7上还设有定位栓72,通过将定位栓72贯穿第一通孔711和第二通孔811,从而升降支撑腿8与支撑板7连接,不使用升降支撑腿8时可拔出定位栓72,滑动升降支撑腿8将底板81滑出滑槽71,从而将升降支撑腿8拆卸下来。液压油缸82上连接有用于驱动活塞杆83的手动驱动杆85和设置在手动驱动杆85上的套筒86,套筒86用于连接加长握杆,使用时将外部的加长握杆插入套筒86,来回上下移动加长握杆,使手动驱动杆85移动从而起到手动泵的作用,手动使液压油缸82工作,活塞杆83伸长,升降支撑腿8可使用现有的液压千斤顶,例如深圳市西信科技有限公司的cess立式液压千斤顶,短款的活塞杆行程可达385mm,承重3吨,适合将无人直升机顶起到合适高度。
21.工作时,工作人员可携带4个升降支撑腿8,将4个升降支撑腿8与支撑板7连接并分别用定位栓72定位,再依次用携带的加长握杆对4个升降支撑腿8进行手动驱动,使4个升降支撑腿8都伸长,然后移动无人直升机到指定地点后对4个升降支撑腿8的液压油缸82进行泄压,使升降支撑腿8不受力,再拔出定位栓72,滑动升降支撑腿8使其与支撑板7分离(升降支撑腿8也可以不拆下跟随无人直升机,方便降落时快速投入使用使无人直升机移动)。
22.以上仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人
员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种无人直升机起落架,其特征在于,包括与无人直升机机架连接的第一支架(1)、与所述第一支架(1)对称设置的第二支架(2)以及将所述第一支架(1)和第二支架(2)连接的连接杆(3),所述第一支架(1)和第二支架分别包括两个或两个以上的支撑杆(4)、与所述支撑杆(4)连接的横杆(5)以及与所述支撑杆(4)连接并用于接触地面的滑撬管(6),所述支撑杆(4)上设有支撑板(7),所述支撑板(7)上可拆卸连接有升降支撑腿(8)。2.根据权利要求1所述的无人直升机起落架,其特征在于,所述滑撬管(6)包括弯管(61)、直管(62)和三通接头(63),所述弯管(61)和直管(62)通过三通接头(63)与所述支撑杆(4)连接。3.根据权利要求1所述的无人直升机起落架,其特征在于,所述支撑板(7)上设有滑槽(71),所述升降支撑腿(8)包括与所述滑槽(71)滑动连接的底板(81)、设置在所述底板(81)上的液压油缸(82)、与所述液压油缸(82)活动连接的活塞杆(83)和设置在活塞杆(83)上的滚轮(84)。4.根据权利要求3所述的无人直升机起落架,其特征在于,所述支撑板(7)上设有贯穿所述滑槽(71)的第一通孔(711),所述底板(81)与第一通孔(711)对应位置设有第二通孔(811),所述支撑板(7)上设有贯穿第一通孔(711)和第二通孔(811)的定位栓(72)。5.根据权利要求3所述的无人直升机起落架,其特征在于,所述液压油缸(82)上连接有用于驱动活塞杆(83)的手动驱动杆(85)和设置在手动驱动杆(85)上的套筒(86),所述套筒(86)用于连接加长握杆。6.根据权利要求1所述的无人直升机起落架,其特征在于,所述连接杆(3)与支撑杆(4)连接,且所述连接杆(3)数量在一个以上。
技术总结
本实用新型公开了一种无人直升机起落架,属于无人机技术领域,该起落架包括与无人直升机机架连接的第一支架、与第一支架对称设置的第二支架以及将第一支架和第二支架连接的连接杆,第一支架和第二支架分别包括两个或两个以上的支撑杆、与支撑杆连接的横杆以及与支撑杆连接并用于接触地面的滑撬管,支撑杆上设有支撑板,所述支撑板上可拆卸连接有升降支撑腿。本实用新型在升降支撑腿上设置滚轮,可推动无人直升机到指定位置,单人便可完成无人直升机的移动工作,对无人直升机无损伤风险且工作量小,极大方便了舰船上无人直升机的移动,提高无人直升机工作效率;滑撬管采弯管、直管和三通接头连接,结构简单、成本低且方便维护换新。换新。换新。
技术研发人员:张曙光 单玉林 纪伟 李丰彬 万敏 孙宏
受保护的技术使用者:江苏大洋海洋装备有限公司
技术研发日:2022.01.11
技术公布日:2022/5/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1