一种起重机交叉防撞安全报警保护系统及方法与流程
1.本发明涉及起重机技术领域,尤其涉及一种起重机交叉防撞安全报警保护系统及方法。
背景技术:
2.起重机为船厂或港口装卸工件用,是船厂的重要生产设备,主要为起升、变幅、旋转和运行机构。起重机的旋转机构和变幅机构驱动其臂架,可以进行水平方向的旋转和垂直方向的摆动,运行机构驱动门座式起重机沿地面轨道运动。近年来,工厂中设备密度逐年增高,在同一区域内往往有多台起重机同时作业,在起重机运行时,需要依靠司机和地面调度人员肉眼观察起重机各结构件的空间位置,人工预警,而人工观察无量化数据,手动调节无参考坐标,其作业空间易相互重叠,易发生碰撞;起重机若相互发生碰撞,易造成事故。
3.因此,提出一种起重机交叉防撞安全报警保护系统及方法。
技术实现要素:
4.本发明的目的在于:为了解决现有技术中的起重机在运行时,易相互重叠,已发生碰撞的问题,而提出的一种起重机交叉防撞安全报警保护系统及方法。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种起重机交叉防撞安全报警保护系统及方法,包括安装在低起重机驾驶室的低起重机控制主机和安装在高起重机驾驶室的高起重机控制主机;
7.用于对数据分析处理的数据处理中心;
8.分别安装在低起重机控制主机和高起重机控制主机上的起重机行走机构、警报装置和监测系统;
9.监测系统包括用于对低起重机和高起重机之间的距离测定的测距系统和光电编码器。
10.作为上述技术方案的进一步描述:
11.所述测距系统包括雷达探头和无线接收传输器。
12.作为上述技术方案的进一步描述:
13.所述光电编码器安装在起重机行走机构上,所述光电编码器通过线缆通信接口与低起重机控制主机和高起重机控制主机电性连接。
14.作为上述技术方案的进一步描述:
15.所述雷达探头输出端与设置在同一起重机上的无线接收传输器的输入端电性连接,所述无线接收传输器分别与低起重机控制主机和高起重机控制主机电性连接的输入端。
16.作为上述技术方案的进一步描述:
17.所述低起重机控制主机和高起重机控制主机输出端与警报装置的输入端电性连接。
18.作为上述技术方案的进一步描述:
19.所述警报装置为声光报警器。
20.综上所述,由于采用了上述技术方案,本发明的有益效果是:
21.本发明中,监控系统包括测距系统和光电编码器,雷达探头测定高起重机和低起重机之间的距离,雷达探头将距离信号经无线接收传输器传递给其所在的起重机的控制主机上,低起重机控制主机和高起重机控制主机将信号传给数据处理中心,数据处理中心根据光电编码器的信号和距离信号判断是否超出安全距离,相比人工监测的作业方法,可提高生产安全性,增加生产效率,降低司机作业强度。
附图说明
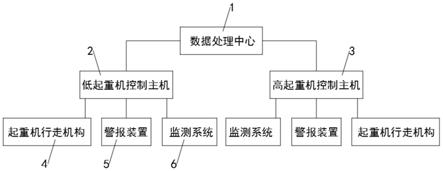
22.图1为本发明提出的一种起重机交叉防撞安全报警保护系统及方法的保护系统结构示意图;
23.图2为本发明提出的一种起重机交叉防撞安全报警保护系统及方法的监测系统结构示意图。
24.图例说明:
25.1、数据处理中心;2、低起重机控制主机;3、高起重机控制主机;4、起重机行走机构;5、警报装置;6、监测系统;7、测距系统;8、光电编码器;9、无线接收传输器;10、雷达探头。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
27.实施例1
28.请参阅图1-2,一种起重机交叉防撞安全报警保护系统及方法,包括安装在低起重机驾驶室的低起重机控制主机2和安装在高起重机驾驶室的高起重机控制主机3;
29.用于对数据分析处理的数据处理中心1,数据处理中心1为plc单片机;
30.分别安装在低起重机控制主机2和高起重机控制主机3上的起重机行走机构4、警报装置5和监测系统6,低起重机控制主机2和高起重机控制主机3均与起重机行走机构4、警报装置5的输入端电性连接;
31.监测系统6包括用于对低起重机和高起重机之间的距离测定的测距系统7和光电编码器8,光电编码器8通过线缆通信接口与低起重机控制主机2和高起重机控制主机3电性连接。
32.实施例2
33.重复实施例1,请参阅图1和图2,测距系统7包括雷达探头10和无线接收传输器9,低起重机控制主机2和高起重机控制主机3输出端与警报装置5的输入端电性连接,警报装置5为声光报警器,在数据处理中心1根据光电编码器8的信号和距离信号判断超出安全距离时,数据处理中心1将信号分别传递给低起重机控制主机2和高起重机控制主机3,低起重
机控制主机2和高起重机控制主机3控制其警报装置5发出声响,以达到提醒驾驶员的效果。
34.实施例3
35.重复实施例2,请参阅图1和图2,光电编码器8安装在起重机行走机构4上,光电编码器8可将起重机位置坐标数据和臂架的空间位置坐标传输到其所在的起重机的控制主机上,低起重机控制主机2和高起重机控制主机3将信号传递给数据处理中心1,数据处理中心1可进行位置比较和逻辑判断,雷达探头10输出端与设置在同一起重机上的无线接收传输器9的输入端电性连接,无线接收传输器9分别与低起重机控制主机2和高起重机控制主机3电性连接的输入端。
36.工作原理:使用时,雷达探头10将信号传递给无线接收传输器9,无线接收传输器9将信号传递给其所在的起重机的控制主机上,低起重机控制主机2和高起重机控制主机3再将信号传给数据处理中心1,光电编码器8可将起重机位置坐标数据和臂架的空间位置坐标传输到其所在的起重机的控制主机上,低起重机控制主机2和高起重机控制主机3将信号传递给数据处理中心1,数据处理中心1根据光电编码器8的信号和距离信号判断是否超出安全距离,再超出安全距离时,数据处理中心1将信号传递给低起重机控制主机2和高起重机控制主机3,低起重机控制主机2和高起重机控制主机3其所在的起重机上的警报装置5发出声响,起到了提示驾驶员的效果。
37.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种起重机交叉防撞安全报警保护系统及方法,其特征在于,包括安装在低起重机驾驶室的低起重机控制主机(2)和安装在高起重机驾驶室的高起重机控制主机(3);用于对数据分析处理的数据处理中心(1);分别安装在低起重机控制主机(2)和高起重机控制主机(3)上的起重机行走机构(4)、警报装置(5)和监测系统(6);监测系统(6)包括用于对低起重机和高起重机之间的距离测定的测距系统(7)和光电编码器(8)。2.根据权利要求1所述的一种起重机交叉防撞安全报警保护系统及方法,其特征在于,测距系统(7)包括雷达探头(10)和无线接收传输器(9)。3.根据权利要求2所述的一种起重机交叉防撞安全报警保护系统及方法,其特征在于,所述光电编码器(8)安装在起重机行走机构(4)上,所述光电编码器(8)通过线缆通信接口与低起重机控制主机(2)和高起重机控制主机(3)电性连接。4.根据权利要求2所述的一种起重机交叉防撞安全报警保护系统及方法,其特征在于,所述雷达探头(10)输出端与设置在同一起重机上的无线接收传输器(9)的输入端电性连接,所述无线接收传输器(9)分别与低起重机控制主机(2)和高起重机控制主机(3)电性连接的输入端。5.根据权利要求1所述的一种起重机交叉防撞安全报警保护系统及方法,其特征在于,所述低起重机控制主机(2)和高起重机控制主机(3)输出端与警报装置(5)的输入端电性连接。6.根据权利要求4所述的一种起重机交叉防撞安全报警保护系统及方法,其特征在于,所述警报装置(5)为声光报警器。
技术总结
本发明公开了一种起重机交叉防撞安全报警保护系统及方法,包括安装在低起重机驾驶室的低起重机控制主机和安装在高起重机驾驶室的高起重机控制主机,用于对数据分析处理的数据处理中心。本发明中,监控系统包括测距系统和光电编码器,雷达探头测定高起重机和低起重机之间的距离,雷达探头将距离信号经无线接收传输器传递给其所在的起重机的控制主机上,低起重机控制主机和高起重机控制主机将信号传给数据处理中心,数据处理中心根据光电编码器的信号和距离信号判断是否超出安全距离,相比人工监测的作业方法,可提高生产安全性,增加生产效率,降低司机作业强度。降低司机作业强度。降低司机作业强度。
技术研发人员:李红星 顾玉成
受保护的技术使用者:江苏格雷特重工科技发展有限公司
技术研发日:2020.04.21
技术公布日:2021/10/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1