一种户外智能垃圾桶的制作方法
[0001]
本发明属于垃圾桶技术领域,具体的说是一种户外智能垃圾桶。
背景技术:
[0002]
垃圾桶作为人类生活中不可或缺的必需品,它伴随着人类走过了每一个时代。尤其是在当今的旅游景区、大型商场更是必不可少。随着人们环保意识和审美水平的普遍提高,垃圾桶的种类和数量也在不断翻新和增加,人们更加注重它的美观和实用性。
[0003]
中国专利公开了一种户外用智能垃圾桶,专利申请号为2018106418902,包括上端开口的桶体,所述桶体中设有内桶,所述内桶底部设有称重传感器,所述桶体外壁上设有智能提示装置,所述智能提示装置包括信号调理模块、中央处理器、gprs通信模块和led提示模块,所述称重传感器通过信号调理模块与中央处理器连接,所述gprs通信模块和led提示模块均分别与中央处理器连接。
[0004]
上述专利虽然能够使环卫工人精准有效的对该垃圾桶进行清理,提高了垃圾桶的清理效率;现有的户外垃圾桶在清理时,大多是清理人员将内桶体从外桶架内部取出,然后采用手取或者直接翻倒的方式将内桶体内的垃圾进行转移,不仅提高了清理人员的劳动力,同时若内桶体内收集有玻璃或其他带有腐蚀性垃圾时,进而容易导致清理人员在清理内桶体垃圾时,容易出现安全的隐患的现象。
技术实现要素:
[0005]
为了弥补现有技术的不足,本发明提出的一种户外智能垃圾桶,本发明主要用于解决现有的户外垃圾桶在清理时,大多是清理人员将内桶体从外桶架内部取出,然后采用手取或者直接翻倒的方式将内桶体内的垃圾进行转移,不仅提高了清理人员的劳动力,同时容易导致清理人员在清理内桶体垃圾时,容易出现安全的隐患的现象。
[0006]
本发明解决其技术问题所采用的技术方案是:本发明所述的一种户外智能垃圾桶,包括外桶架和内桶体;所述外桶架内部竖直方向对称开设有安装腔,且安装腔内均滑动安装有内桶体;所述外桶架的顶端两侧转动设置有弧形挡板,且弧形挡板位于内桶体的正上方;所述外桶架内部设置有驱动支撑机构,且驱动支撑机构可以对内桶体进行滑动支撑;所述驱动支撑机构包括转动丝杆、丝杆滑套、支撑块和支撑滑板;对称开设的所述安装腔之间开设有导向滑腔,且导向滑腔内转动安装有转动丝杆;所述转动丝杆上套接有丝杆滑套,且丝杆滑套的两侧壁固定有支撑块;对称设置的所述内桶体的底端外圈壁固定有支撑滑板,且支撑滑板的侧壁连接有支撑块;所述支撑滑板的下端面设置有垃圾袋,且垃圾袋的袋口与内桶体的下端口对齐;所述垃圾袋的底端部活动固定到安装腔底端;所述转动丝杆的底端与驱动电机的输出端连接,且驱动电机固定到外桶体内;所述内桶体内部上方设置有红外线感应器,且红外线感应器与外桶架内设置的智能控制器电信号连接;所述弧形挡板的上表面安装有太阳能电池板;
[0007]
工作时,当内桶体内的红外线感应器感应到内桶体内的垃圾到达桶口位置时,智
能控制器可以通过电信号向该区域的管理人员进行发送信号,然后清理人员达到对应位置的垃圾桶处,清理人员先将外桶架上方的弧形挡板转动到与内桶体上方端口脱离对齐,然后通过外桶架上的控制按钮控制驱动电机转动,驱动电机会通过转动丝杆带动丝杆滑套在导向滑腔内向上滑动,由于支撑滑板通过支撑块与丝杆滑套侧壁连接,且支撑滑板固定到内桶体的底端,进而丝杆滑套的向上移动后带动内桶体向上滑动伸出安装腔外,由于内桶体下端口套接有垃圾袋,且垃圾袋的底端活动固定到安装腔的底端,内桶体向上滑动时会带动垃圾袋的上端口向上滑动,进而使得压缩的垃圾袋产生变形,进而内桶体的向上滑动和垃圾袋的拉伸张开可以将内桶体内收集存留的垃圾坠入到张开的垃圾袋内,当内桶体上升到安装腔最高位置后,内桶体内的收集的垃圾会完全落入到张开的垃圾袋内,然后清理人员将外桶架侧壁的仓门打开,将垃圾袋的袋口从支撑滑板的底端面取下,同时将垃圾袋从安装腔内脱离固定,进而便于将收集有垃圾的垃圾袋从外桶架内取出,然后将新的垃圾袋的袋口固定到支撑滑板的底端,垃圾袋的底端固定到安装腔底端,控制按钮控制驱动电机反向转动,转动丝杆通过丝杆滑套带动内桶体向下滑动,内桶体会将垃圾袋压缩到安装腔的底端,进而便于垃圾桶能够继续使用;通过内桶体底端安装的垃圾袋,驱动支撑机构可以驱动内桶体向上滑动到外桶架的顶端,同时内桶体可以带动压缩的垃圾袋张开,便于内桶体内收集的垃圾能够直接落入到张开后的垃圾袋内,使得户外垃圾桶内的垃圾能够快速智能装入到垃圾袋内,减少了清理人员与内桶体内收集的垃圾接触,不仅提高了清理人员对户外垃圾桶的安全清理,同时提高了清理人员对户外垃圾桶的快速高效清理效果;防止现有的户外垃圾桶在清理时,大多是清理人员将内桶体从外桶架内部取出,然后采用手取或者直接翻倒的方式将内桶体内的垃圾进行转移,不仅提高了清理人员的劳动力,同时若内桶体内收集有玻璃或其他带有腐蚀性垃圾时,进而容易导致清理人员在清理内桶体垃圾时,容易出现安全的隐患的现象。
[0008]
优选的,所述支撑滑板的底端通过连接软条软连接有电磁吸附框,且电磁吸附框电磁吸附到支撑滑板的底端面;所述电磁吸附框和支撑滑板之间夹紧固定有垃圾袋的袋口;工作时,当需要将新的垃圾袋的袋口装入到内桶体底端时,清理人员先通过控制按钮控制支撑滑板底端的电磁吸附框脱离对支撑滑板的电磁吸附,使得电磁吸附框能够与支撑滑板下表面形成间隙,然后清理人员将垃圾袋的袋口四壁贴合到支撑滑板与电磁吸附框之间的缝隙内,然后将垃圾袋的底端固定到安装腔底端内部,控制按钮会控制电磁吸附框得电电磁吸附到支撑滑板的下表面,进而电磁吸附框的磁性吸附力可以将垃圾袋夹紧吸附到内桶体下表面,进而便于将垃圾袋进行固定,防止内桶体收集满垃圾后,由于内桶体向上滑动,内桶体内部的垃圾坠入到张开的垃圾袋内,若垃圾袋的袋口在内桶体下方牢固性较差,进而导致垃圾袋从内桶体下方产生脱离的现象,进而影响垃圾袋对垃圾的快速收集清理。
[0009]
优选的,所述支撑块的内部开设有滑动腔,且滑动腔内通过弹簧滑动插接有硬质电磁块;所述支撑滑板与支撑块贴合的侧壁开设有插接腔,且插接腔内部滑动插接有硬质电磁块;工作时,当其中一个内桶体内收集的垃圾达到要清理的标准时,另一个内桶体内收集的垃圾较少时,此时控制器会控制与垃圾收集较少的内桶体底端侧壁接触的支撑块内部的硬质电磁块断电,硬质电磁块在弹簧的拉力下从支撑滑板侧壁的插接腔内脱离,使得该支撑块与垃圾较少的内桶体脱离连接,然后清理人员将垃圾较多的内桶体上方的弧形挡板转动,通过控制按钮控制驱动电机转动,丝杆滑套会通过支撑块与支撑滑板的连接带动收
集有较多垃圾的内桶体向上滑动伸出,进而便于将内桶体内的垃圾收集存放到垃圾袋内;然后清理人员将新的垃圾袋安装带清理后的内桶体底端,内桶体通过驱动电机的反向转动复位到安装腔内,同时丝杆滑套侧壁支撑块会与另一侧未移动的支撑滑板侧壁的插接腔对齐,此时该支撑块上的硬质电磁块得电,硬质电磁块的磁性吸附力会滑动插入到插接腔内,同时硬质电磁块不会从滑动腔内脱离,进而便于支撑块与支撑滑板连接,便于驱动支撑机构对内桶体进行驱动支撑,同时便于清理人员对单个内桶体进行快速清理作业,提高内桶体垃圾的收集效率。
[0010]
优选的,所述转动丝杆的底端套接有主动轮盘;所述外套架的两侧壁内部通过轴承转动安装有转动杆,且转动杆的顶端连接到弧形挡板的下表面;所述转动杆的底端通过连轴机构连接有驱动管轴;所述驱动管轴外部套接有从动轮盘,且从动轮盘通过皮带与主动轮盘传动连接;工作时,当需要将弧形挡板进行转动,使得弧形挡板脱离对内桶体上端口进行遮挡时,清理人员可以通过控制按钮控制驱动电机转动,驱动电机在带动转动丝杆转动,同时会通过主动轮盘与从动轮盘上套接的皮带带动驱动管轴转动,此时连轴机构工作使得转动杆与驱动管轴连接,进而驱动管轴的转动会带动转动杆转动,转动杆转动会同步带动弧形挡板转动,当弧形挡板转动脱离内桶体正上方后,此时智能控制器会控制连轴机构脱离对转动杆和驱动管轴的连接,驱动电机继续转动带动内桶体向上移动时,驱动管轴会单独转动,进而不需要清理人员手动转动弧形挡板,便可以将弧形挡板脱离与内桶体上方的端口对齐,便于内桶体能够向上滑动伸出;当需要弧形挡板转动到内桶体正上方时,驱动电机可以驱动内桶体向下移动一段距离,然后智能控制器控制连轴机构将转动杆和驱动管轴连接,使得驱动管轴能够带动转动杆转动,转动杆会带动弧形挡板转动到内桶体正上方,便于对内桶体的上方端口进行遮挡。
[0011]
优选的,所述连接机构包括十字滑动柱、滑动盘、卡合盘和定位柱;所述驱动管轴内部开设有十字滑槽,且十字滑槽内滑动插接有十字滑动柱;所述十字滑动柱的底端连接有电动伸缩杆,且电动伸缩杆转动安装到外桶架内;所述支撑滑动柱的顶端固定有滑动盘,且滑动盘上均匀开设有多个定位孔;所述卡合盘固定有转动杆的底端,且卡合盘底端面固定有多个定位柱;多个所述定位柱均滑动插接有多个定位孔内;工作时,当需要转动杆与驱动管轴连接时,此时驱动电机停止转动,此时智能控制器会控制电动伸缩杆伸出,电动伸缩杆会带动十字滑动柱沿着十字滑槽向上滑动,同时十字滑动柱会带动滑动盘向上滑动贴合到卡合盘下表面,卡合盘下表面设置的多个定位柱会对应插入到滑动盘的定位孔内,进而使得转动杆和驱动管轴能够相互连接,便于驱动管轴能够带动转动柱转动,使得弧形挡板能够智能转动;当需要转动杆与驱动管轴脱离连接时,此时驱动电机停止转动,智能控制器会控制电动伸缩杆收缩,电动伸缩杆会同时十字滑动柱带动滑动盘向下滑动,滑动盘的向下滑动会使得定位柱与定位孔脱离插接,进而便于转动杆与驱动管轴脱离转动连接,使得驱动电机在继续转动时,不会影响弧形挡板的错位固定。
[0012]
优选的,所述插接腔内部橡胶挤压囊;所述连接软条内部开设有膨胀腔,且膨胀腔通过导气槽与橡胶挤压囊连通;工作时,当硬质电磁块滑动插入到插接腔内时,硬质电磁块会对插接腔内的橡胶挤压囊产生挤压力,使得橡胶挤压囊产生压缩变形,同时橡胶挤压囊可以对插接腔起到耐磨保护的作业,防止硬质电磁块频繁与插接腔滑动插接,导致插接腔产生磨损的现象,进而影响硬质电磁块与插接腔之间稳定连接;当橡胶挤压囊产生挤压变
形时,橡胶挤压囊内部的气体会通过导气槽进入到连接软条内,使得连接软条产生膨胀硬化,进而增大电磁吸附框架在支撑滑板底端的电磁吸附力,防止由于连接软条较软,进而导致内桶体在向上滑动拉伸垃圾袋时,垃圾袋的袋口从内桶体底端脱离的现象,进而影响垃圾袋对内桶体内垃圾的稳定存放收集的现象。
[0013]
本发明的有益效果如下:
[0014]
1.本发明通过内桶体底端安装的垃圾袋,驱动支撑机构可以驱动内桶体向上滑动到外桶架的顶端,同时内桶体可以带动压缩的垃圾袋张开,便于内桶体内收集的垃圾能够直接落入到张开后的垃圾袋内,使得户外垃圾桶内的垃圾能够快速智能装入到垃圾袋内,减少了清理人员与内桶体内收集的垃圾接触,不仅提高了清理人员对户外垃圾桶的安全清理,同时提高了清理人员对户外垃圾桶的快速高效清理效果。
[0015]
2.本发明通过连轴机构对转动杆和转动管轴的配合,连轴机构对转动杆和转动管轴连接时,驱动支撑机构可以带动弧形挡板进行智能转动,不需要清理人员转动弧形挡板,便可以实现内桶体的向上滑动伸出;连轴机构脱离对转动杆和转动管轴连接时,可以实现内桶体的单独转动,便于内桶体内的垃圾能够快速落入到拉伸的垃圾袋内,提高内桶体内垃圾的快速收集效果。
附图说明
[0016]
下面结合附图对本发明作进一步说明。
[0017]
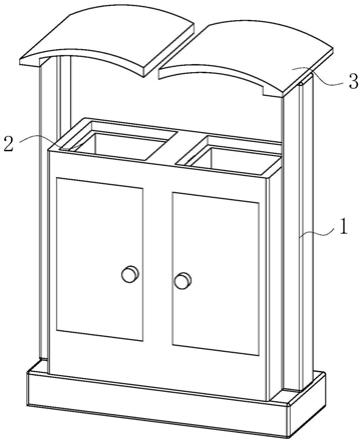
图1是本发明的立体图;
[0018]
图2是本发明的剖视图;
[0019]
图3是本发明图2中a处局部放大图;
[0020]
图4是本发明图2中b处局部放大图;
[0021]
图中:外桶架1、安装腔11、内桶体2、弧形挡板3、驱动支撑机构4、转动丝杆41、丝杆滑套42、支撑块43、滑动腔431、支撑滑板44、插接腔441、垃圾袋5、连接软条6、膨胀腔61、电磁吸附框7、硬质电磁块8、连轴机构9、十字滑动柱91、滑动盘92、定位孔921、卡合盘93、定位柱94、主动轮盘10、转动杆20、驱动管轴30、从动轮盘40、皮带50、橡胶挤压囊60。
具体实施方式
[0022]
使用图1-图4对本发明一实施方式的一种户外智能垃圾桶进行如下说明。
[0023]
如图1-图4所示,本发明所述的一种户外智能垃圾桶,包括外桶架1和内桶体2;所述外桶架1内部竖直方向对称开设有安装腔11,且安装腔11内均滑动安装有内桶体2;所述外桶架1的顶端两侧转动设置有弧形挡板3,且弧形挡板3位于内桶体2的正上方;所述外桶架1内部设置有驱动支撑机构4,且驱动支撑机构4可以对内桶体2进行滑动支撑;所述驱动支撑机构4包括转动丝杆41、丝杆滑套42、支撑块43和支撑滑板44;对称开设的所述安装腔11之间开设有导向滑腔,且导向滑腔内转动安装有转动丝杆41;所述转动丝杆41上套接有丝杆滑套42,且丝杆滑套42的两侧壁固定有支撑块43;对称设置的所述内桶体2的底端外圈壁固定有支撑滑板44,且支撑滑板44的侧壁连接有支撑块43;所述支撑滑板44的下端面设置有垃圾袋5,且垃圾袋5的袋口与内桶体2的下端口对齐;所述垃圾袋5的底端部活动固定到安装腔11底端;所述转动丝杆41的底端与驱动电机的输出端连接,且驱动电机固定到外
桶体内;所述内桶体2内部上方设置有红外线感应器,且红外线感应器与外桶架1内设置的智能控制器电信号连接;所述弧形挡板3的上表面安装有太阳能电池板;
[0024]
工作时,当内桶体2内的红外线感应器感应到内桶体2内的垃圾到达桶口位置时,智能控制器可以通过电信号向该区域的管理人员进行发送信号,然后清理人员达到对应位置的垃圾桶处,清理人员先将外桶架1上方的弧形挡板3转动到与内桶体2上方端口脱离对齐,然后通过外桶架1上的控制按钮控制驱动电机转动,驱动电机会通过转动丝杆41带动丝杆滑套42在导向滑腔内向上滑动,由于支撑滑板44通过支撑块43与丝杆滑套42侧壁连接,且支撑滑板44固定到内桶体2的底端,进而丝杆滑套42的向上移动后带动内桶体2向上滑动伸出安装腔11外,由于内桶体2下端口套接有垃圾袋5,且垃圾袋5的底端活动固定到安装腔11的底端,内桶体2向上滑动时会带动垃圾袋5的上端口向上滑动,进而使得压缩的垃圾袋5产生变形,进而内桶体2的向上滑动和垃圾袋5的拉伸张开可以将内桶体2内收集存留的垃圾坠入到张开的垃圾袋5内,当内桶体2上升到安装腔11最高位置后,内桶体2内的收集的垃圾会完全落入到张开的垃圾袋5内,然后清理人员将外桶架1侧壁的仓门打开,将垃圾袋5的袋口从支撑滑板44的底端面取下,同时将垃圾袋5从安装腔11内脱离固定,进而便于将收集有垃圾的垃圾袋5从外桶架1内取出,然后将新的垃圾袋5的袋口固定到支撑滑板44的底端,垃圾袋5的底端固定到安装腔11底端,控制按钮控制驱动电机反向转动,转动丝杆41通过丝杆滑套42带动内桶体2向下滑动,内桶体2会将垃圾袋5压缩到安装腔11的底端,进而便于垃圾桶能够继续使用;通过内桶体2底端安装的垃圾袋5,驱动支撑机构4可以驱动内桶体2向上滑动到外桶架1的顶端,同时内桶体2可以带动压缩的垃圾袋5张开,便于内桶体2内收集的垃圾能够直接落入到张开后的垃圾袋5内,使得户外垃圾桶内的垃圾能够快速智能装入到垃圾袋5内,减少了清理人员与内桶体2收集内垃圾接触,不仅提高了清理人员对户外垃圾桶的安全清理,同时提高了清理人员对户外垃圾桶的快速高效清理效果;防止现有的户外垃圾桶在清理时,大多是清理人员将内桶体2从外桶架1内部取出,然后采用手取或者直接翻倒的方式将内桶体2内的垃圾进行转移,不仅提高了清理人员的劳动力,同时若内桶体2内收集有玻璃或其他带有腐蚀性垃圾时,进而容易导致清理人员在清理内桶体2垃圾时,容易出现安全的隐患的现象。
[0025]
作为本发明的一种实施方式,所述支撑滑板44的底端通过连接软条6软连接有电磁吸附框7,且电磁吸附框7电磁吸附到支撑滑板44的底端面;所述电磁吸附框7和支撑滑板44之间夹紧固定有垃圾袋5的袋口;工作时,当需要将新的垃圾袋5的袋口装入到内桶体2底端时,清理人员先通过控制按钮控制支撑滑板44底端的电磁吸附框7脱离对支撑滑板44的电磁吸附,使得电磁吸附框7能够与支撑滑板44下表面形成间隙,然后清理人员将垃圾袋5的袋口四壁贴合到支撑滑板44与电磁吸附框7之间的缝隙内,然后将垃圾袋5的底端固定到安装腔11底端内部,控制按钮会控制电磁吸附框7得电电磁吸附到支撑滑板44的下表面,进而电磁吸附框7的磁性吸附力可以将垃圾袋5夹紧吸附到内桶体2下表面,进而便于将垃圾袋5进行固定,防止内桶体2收集满垃圾后,由于内桶体2向上滑动,内桶体2内部的垃圾坠入到张开的垃圾袋5内,若垃圾袋5的袋口在内桶体2下方牢固性较差,进而导致垃圾袋5从内桶体2下方产生脱离的现象,进而影响垃圾袋5对垃圾的快速收集清理。
[0026]
作为本发明的一种实施方式,所述支撑块43的内部开设有滑动腔431,且滑动腔431内通过弹簧滑动插接有硬质电磁块8;所述支撑滑板44与支撑块43贴合的侧壁开设有插
接腔441,且插接腔441内部滑动插接有硬质电磁块8;工作时,当其中一个内桶体2内收集的垃圾达到要清理的标准时,另一个内桶体2内收集的垃圾较少时,此时控制器会控制与垃圾收集较少的内桶体2底端侧壁接触的支撑块43内部的硬质电磁块8断电,硬质电磁块8在弹簧的拉力下从支撑滑板44侧壁的插接腔441内脱离,使得该支撑块43与垃圾较少的内桶体2脱离连接,然后清理人员将垃圾较多的内桶体2上方的弧形挡板3转动,通过控制按钮控制驱动电机转动,丝杆滑套42会通过支撑块43与支撑滑板44的连接带动收集有较多垃圾的内桶体2向上滑动伸出,进而便于将内桶体2内的垃圾收集存放到垃圾袋5内;然后清理人员将新的垃圾袋5安装带清理后的内桶体2底端,内桶体2通过驱动电机的反向转动复位到安装腔11内,同时丝杆滑套42侧壁支撑块43会与另一侧未移动的支撑滑板44侧壁的插接腔441对齐,此时该支撑块43上的硬质电磁块8得电,硬质电磁块8的磁性吸附力会滑动插入到插接腔441内,同时硬质电磁块8不会从滑动腔431内脱离,进而便于支撑块43与支撑滑板44连接,便于驱动支撑机构4对内桶体2进行驱动支撑,同时便于清理人员对单个内桶体2进行快速清理作业,提高内桶体2垃圾的收集效率。
[0027]
作为本发明的一种实施方式,所述转动丝杆41的底端套接有主动轮盘10;所述外套架的两侧壁内部通过轴承转动安装有转动杆20,且转动杆20的顶端连接到弧形挡板3的下表面;所述转动杆20的底端通过连轴机构9连接有驱动管轴30;所述驱动管轴30外部套接有从动轮盘40,且从动轮盘40通过皮带50与主动轮盘10传动连接;工作时,当需要将弧形挡板3进行转动,使得弧形挡板3脱离对内桶体2上端口进行遮挡时,清理人员可以通过控制按钮控制驱动电机转动,驱动电机在带动转动丝杆41转动,同时会通过主动轮盘10与从动轮盘40上套接的皮带50带动驱动管轴30转动,此时连轴机构9工作使得转动杆20与驱动管轴30连接,进而驱动管轴30的转动会带动转动杆20转动,转动杆20转动会同步带动弧形挡板3转动,当弧形挡板3转动脱离内桶体2正上方后,此时智能控制器会控制连轴机构9脱离对转动杆20和驱动管轴30的连接,驱动电机继续转动带动内桶体2向上移动时,驱动管轴30会单独转动,进而不需要清理人员手动转动弧形挡板3,便可以将弧形挡板3脱离与内桶体2上方的端口对齐,便于内桶体2能够向上滑动伸出;当需要弧形挡板3转动到内桶体2正上方时,驱动电机可以驱动内桶体2向下移动一段距离,然后智能控制器控制连轴机构9将转动杆20和驱动管轴30连接,使得驱动管轴30能够带动转动杆20转动,转动杆20会带动弧形挡板3转动到内桶体2正上方,便于对内桶体2的上方端口进行遮挡。
[0028]
作为本发明的一种实施方式,所述连接机构包括十字滑动柱91、滑动盘92、卡合盘93和定位柱94;所述驱动管轴30内部开设有十字滑槽,且十字滑槽内滑动插接有十字滑动柱91;所述十字滑动柱91的底端连接有电动伸缩杆,且电动伸缩杆转动安装到外桶架1内;所述支撑滑动柱的顶端固定有滑动盘92,且滑动盘92上均匀开设有多个定位孔921;所述卡合盘93固定有转动杆20的底端,且卡合盘93底端面固定有多个定位柱94;多个所述定位柱94均滑动插接有多个定位孔921内;工作时,当需要转动杆20与驱动管轴30连接时,此时驱动电机停止转动,此时智能控制器会控制电动伸缩杆伸出,电动伸缩杆会带动十字滑动柱91沿着十字滑槽向上滑动,同时十字滑动柱91会带动滑动盘92向上滑动贴合到卡合盘93下表面,卡合盘93下表面设置的多个定位柱94会对应插入到滑动盘92的定位孔921内,进而使得转动杆20和驱动管轴30能够相互连接,便于驱动管轴30能够带动转动柱转动,使得弧形挡板3能够智能转动;当需要转动杆20与驱动管轴30脱离连接时,此时驱动电机停止转动,
智能控制器会控制电动伸缩杆收缩,电动伸缩杆会同时十字滑动柱91带动滑动盘92向下滑动,滑动盘92的向下滑动会使得定位柱94与定位孔921脱离插接,进而便于转动杆20与驱动管轴30脱离转动连接,使得驱动电机在继续转动时,不会影响弧形挡板3的错位固定。
[0029]
作为本发明的一种实施方式,所述插接腔441内部橡胶挤压囊60;所述连接软条6内部开设有膨胀腔61,且膨胀腔61通过导气槽与橡胶挤压囊60连通;工作时,当硬质电磁块8滑动插入到插接腔441内时,硬质电磁块8会对插接腔441内的橡胶挤压囊60产生挤压力,使得橡胶挤压囊60产生压缩变形,同时橡胶挤压囊60可以对插接腔441起到耐磨保护的作业,防止硬质电磁块8频繁与插接腔441滑动插接,导致插接腔441产生磨损的现象,进而影响硬质电磁块8与插接腔441之间稳定连接;当橡胶挤压囊60产生挤压变形时,橡胶挤压囊60内部的气体会通过导气槽进入到连接软条6内,使得连接软条6产生膨胀硬化,进而增大电磁吸附框7架在支撑滑板44底端的电磁吸附力,防止由于连接软条6较软,进而导致内桶体2在向上滑动拉伸垃圾袋5时,垃圾袋5的袋口从内桶体2底端脱离的现象,进而影响垃圾袋5对内桶体2内垃圾的稳定存放收集的现象。
[0030]
具体工作流程如下:
[0031]
工作时,当内桶体2内的红外线感应器感应到内桶体2内的垃圾到达桶口位置时,智能控制器可以通过电信号向该区域的管理人员进行发送信号,然后清理人员达到对应位置的垃圾桶处,清理人员先将外桶架1上方的弧形挡板3转动到与内桶体2上方端口脱离对齐,然后通过外桶架1上的控制按钮控制驱动电机转动,驱动电机会通过转动丝杆41带动丝杆滑套42在导向滑腔内向上滑动,由于支撑滑板44通过支撑块43与丝杆滑套42侧壁连接,且支撑滑板44固定到内桶体2的底端,进而丝杆滑套42的向上移动后带动内桶体2向上滑动伸出安装腔11外,由于内桶体2下端口套接有垃圾袋5,且垃圾袋5的底端活动固定到安装腔11的底端,内桶体2向上滑动时会带动垃圾袋5的上端口向上滑动,进而使得压缩的垃圾袋5产生变形,进而内桶体2的向上滑动和垃圾袋5的拉伸张开可以将内桶体2内收集存留的垃圾坠入到张开的垃圾袋5内,当内桶体2上升到安装腔11最高位置后,内桶体2内的收集的垃圾会完全落入到张开的垃圾袋5内,然后清理人员将外桶架1侧壁的仓门打开,将垃圾袋5的袋口从支撑滑板44的底端面取下,同时将垃圾袋5从安装腔11内脱离固定,进而便于将收集有垃圾的垃圾袋5从外桶架1内取出,然后将新的垃圾袋5的袋口固定到支撑滑板44的底端,垃圾袋5的底端固定到安装腔11底端,控制按钮控制驱动电机反向转动,转动丝杆41通过丝杆滑套42带动内桶体2向下滑动,内桶体2会将垃圾袋5压缩到安装腔11的底端,进而便于垃圾桶能够继续使用。
[0032]
在本发明的描述中,需要理解的是,术语“中心”、“前”、“后”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
[0033]
虽然本发明是通过具体实施例进行说明的,本领域技术人员应当明白,在不脱离本发明范围的情况下,还可以对本发明进行各种变换及等同替代。另外,针对特定情形或材料,可以对本发明做各种修改,而不脱离本发明的范围。因此,本发明不局限于所公开的具体实施例,而应当包括落入本发明权利要求范围内的全部实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1