一种矩形管的磁吸机构的制作方法
[0001]
本发明涉及一种磁吸机构,用于在矩形管的锯切过程中吸料转移矩形管。
背景技术:
[0002]
在矩形管的锯切过程中,经常需要将矩形管从料框中提起送至输送线上,然后由锯切机构锯切;然由于料框中的矩形管是多根堆放的,堆放的过程中,相邻的矩形管之间的侧壁相互接触,这样就没有留给普通的矩形管的夹具的插入夹持的空间,导致普通的矩形管在进行夹料时并不适用。
技术实现要素:
[0003]
本发明所要解决的技术问题是:提供一种矩形管的磁吸机构,该磁吸机构利用磁力吸附矩形管,方便矩形管的转移同时还能够对矩形管进行辅助夹持,提高转移过程中的可靠性。
[0004]
为解决上述技术问题,本发明的技术方案是:一种矩形管的磁吸机构,包括底座,所述底座的底部设置有至少一个可开关磁性的磁吸头,所述底座上升降安装有辅助夹料机构,所述底座的上部安装有驱动辅助夹料机构升降的夹料升降动力装置。
[0005]
作为一种优选的方案,所述辅助夹料机构包括夹料支座,所述夹料支座由夹料升降动力装置驱动,所述夹料支座的一侧设置有限位挡板,所述夹料支座上摆动安装有夹爪,所述夹爪的一端为活动端且设置成夹持部,所述夹料支座上安装有驱动夹爪偏摆的偏摆动力装置,所述偏摆动力装置驱动夹爪在脱开工位或夹紧工位偏摆,所述夹爪在夹紧工位时与限位挡板配合夹持矩形管。
[0006]
作为一种优选的方案,所述夹爪包括夹爪臂和与夹爪臂相交一夹角的所述夹持部,所述夹爪臂通过摆动轴摆动安装有所述夹爪支座上。
[0007]
作为一种优选的方案,所述夹持部在夹持工位时位于矩形管的下方。
[0008]
作为一种优选的方案,所述偏摆动力装置包括偏摆气缸,所述偏摆气缸的缸体摆动安装于夹爪支座上;所述偏摆气缸的活塞杆与夹爪臂的中部铰接。
[0009]
作为一种优选的方案,所述磁吸头包括磁吸支座,所述磁吸支座安装于底座的下方,所述磁吸支座上安装有磁吸头本体。
[0010]
作为一种优选的方案,所述磁吸支座与底座之间设置有缓冲垫块。
[0011]
作为一种优选的方案,所述磁吸头的数量为两个,所述辅助夹料机构位于两个磁吸头之间。
[0012]
作为一种优选的方案,所述磁吸头本体为电磁铁或者气动磁体。
[0013]
作为一种优选的方案,所述底座上或者磁吸支座上安装有用于检测矩形管位置的检测传感器。
[0014]
采用了上述技术方案后,本发明的效果是:由于磁吸机构,包括底座,所述底座的底部设置有至少一个可开关磁性的磁吸头,所述底座上升降安装有辅助夹料机构,所述底
座的上部安装有驱动辅助夹料机构升降的夹料升降动力装置,因此,该磁吸机构可以利用磁吸头来直接吸附矩形管的上表面,从而就可以将矩形管提起,方便实现转移,而矩形管提起后,直接利用辅助夹料机构进行夹持,避免吸料转移的出现矩形管掉落的情况,可靠性更高。
[0015]
又由于所述辅助夹料机构包括夹料支座,所述夹料支座由夹料升降动力装置驱动,所述夹料支座的一侧设置有限位挡板,所述夹料支座上摆动安装有夹爪,所述夹爪的一端为活动端且设置成夹持部,所述夹料支座上安装有驱动夹爪偏摆的偏摆动力装置,所述偏摆动力装置驱动夹爪在脱开工位或夹紧工位偏摆,所述夹爪在夹紧工位时与限位挡板配合夹持矩形管,该辅助夹料机构利用可升降的夹料支座从而带动夹爪上升下降,在磁吸头吸料时夹爪上升避让,而吸料后,夹料支座下降然后夹爪偏摆与限位挡板配合实现辅助夹料,这样避免矩形管掉落。
[0016]
又由于所述夹爪包括夹爪臂和与夹爪臂相交一夹角的所述夹持部,所述夹爪臂通过摆动轴摆动安装有所述夹爪支座上,所述夹持部在夹持工位时位于矩形管的下方。该夹料部位于矩形管的下方可以起到支托的作用,同时夹爪臂与夹持部有一定角度,夹爪臂和限位挡板共同配合支护矩形管的两侧。
[0017]
又由于所述磁吸支座与底座之间设置有缓冲垫块,该缓冲垫块,该缓冲垫块可以起到缓冲作用,避免硬撞击。
[0018]
又由于所述磁吸头的数量为两个,所述辅助夹料机构位于两个磁吸头之间,这样,磁吸头吸附矩形管后,辅助夹料机构处于两个磁吸头之间,这样能更好的辅助夹持,矩形管的承受力更合理。
[0019]
又由于所述底座上或者磁吸支座上安装有用于检测矩形管位置的检测传感器,这样可以方便磁吸头准确吸料。
附图说明
[0020]
下面结合附图和实施例对本发明进一步说明。
[0021]
图1是本发明实施例的侧面结构示意图;
[0022]
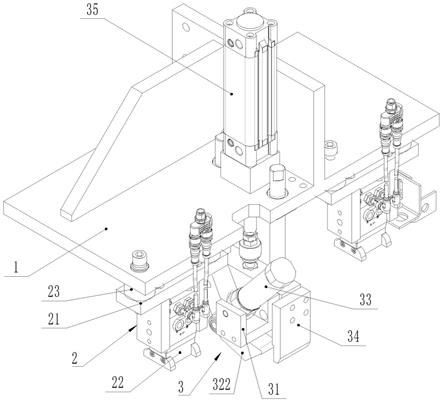
图2是本发明实施例的立体图;
[0023]
图3是本发明实施例的另一个角度的示意图;
[0024]
附图中:1.底座;2.磁吸头;21.磁吸支座;22.磁吸头本体;23.缓冲垫块;3.辅助夹料机构;31.夹料支座;32.夹爪;33.偏摆动力装置;34.限位挡板;35.夹料升降动力装置;321.夹爪臂;322.夹持部;323.摆动轴;4.检测传感器;41.第一传感器支架;42.第二传感器支架。
具体实施方式
[0025]
下面通过具体实施例对本发明作进一步的详细描述。
[0026]
如图1至图3所示,一种矩形管的磁吸机构,包括底座1,所述底座1的底部设置有至少一个可开关磁性的磁吸头2,所述底座1上升降安装有辅助夹料机构3,所述底座1的上部安装有驱动辅助夹料机构3升降的夹料升降动力装置35。
[0027]
所述磁吸头2包括磁吸支座21,磁吸支座21安装于底座1的下方,磁吸支座21上安
装有磁吸头本体22。所述磁吸支座21与底座1之间设置有缓冲垫块23,当磁吸头2与矩形管进行接触时,该缓冲垫块23可以起到缓冲作用,从而避免硬碰撞。如图2和图3所示,所述磁吸头2的数量为两个,所述辅助夹料机构3位于两个磁吸头2之间。
[0028]
其中,所述磁吸头本体22可以开闭磁性,因此,所述磁吸头本体22选用市面上已知的磁性元件,例如其可以为电磁铁或者气动磁体。而启动磁铁选用的是广州市泰恩自动化设备有限公司销售的ixtur map-120r和map-180任一种气动控制的永磁体;可以根据矩形管的重量进行选择。
[0029]
如图1至图3所示,所述辅助夹料机构3包括夹料支座31,所述夹料支座31由夹料升降动力装置35驱动,所述夹料支座31通过两根导杆安装于底座1上实现升降滑动安装,所述夹料支座31的一侧设置有限位挡板34,所述夹料支座31上摆动安装有夹爪32,所述夹爪32的一端为活动端且设置成夹持部322,所述夹料支座31上安装有驱动夹爪32偏摆的偏摆动力装置33,所述偏摆动力装置33驱动夹爪32在脱开工位或夹紧工位偏摆,所述夹爪32在夹紧工位时与限位挡板34配合夹持矩形管。
[0030]
所述夹爪32包括夹爪臂321和与夹爪臂321相交一夹角的所述夹持部322,所述夹爪臂321通过摆动轴323摆动安装有所述夹爪32支座上。所述夹持部322在夹持工位时位于矩形管的下方。所述偏摆动力装置33包括偏摆气缸,所述偏摆气缸的缸体摆动安装于夹爪32支座上;所述偏摆气缸的活塞杆与夹爪臂321的中部铰接。当摆动气缸的活塞杆伸缩时就会带动夹爪臂321偏摆,从而夹爪臂321、夹持部322和限位挡板34共同配合实现矩形管的夹持。
[0031]
如图2和图3所示,所述底座1上或者磁吸支座21上安装有用于检测矩形管位置的检测传感器4。本实施例中优选的,检测传感器4包括第一传感器和第二传感器,所述第一传感器安装于第一传感器支架41上,第二传感器安装于第二传感器支架上,所述第一传感器和第二传感器的检测方向不同,第一传感器用来检测下方是否有矩形管,所述第二传感器用来检测水平移动的方向上是否有矩形管,第一传感器支架41和第二传感器支架42可以安装在底座1上,也可以安装在磁吸支座21上,可以根据实际情况调整。
[0032]
以上所述实施例仅是对本发明的优选实施方式的描述,不作为对本发明范围的限定,在不脱离本发明设计精神的基础上,对本发明技术方案作出的各种变形和改造,均应落入本发明的权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1