一种无驱动自适应抓放集装箱的夹取装置的制作方法
[0001]
本发明涉及起重机附件技术领域,特别是一种无驱动自适应抓放集装箱的夹取装置。
背景技术:
[0002]
集装箱起重机是集装箱码头常用的堆码设备,其先利用抓斗结构来抓取集装箱,接着利用升降设备调整集装箱的高度,然后使用行走结构带动集装箱移动到目的地,最后再卸载集装箱。
[0003]
目前抓斗结构在抓取集装箱时,需要将其先对准集装箱上顶梁的角件,再通过抓斗结构配套的动力设备带动其两端的挂钩伸缩,完成对集装箱的抓取,因此,抓斗结构附件多,质量重,如中国申请专利cn201821322886.1公开了一种集装箱用起重机的抓斗结构,其需要利用电动伸缩杆来完成锁固装置的移动,这就需要在抓斗结构上配置电机以及电缆等相关附件,抓斗结构整体质量较大,同时,集装箱吊运过程中的能耗也较大。
技术实现要素:
[0004]
为解决现有技术条件的不足,本发明提供了一种无驱动自适应抓放集装箱的夹取装置,本夹取装置设置按压伸缩结构,使用时,其按压部位与集装箱接触,夹取装置在自身重力作用下下降按压按压部位,从而带动伸缩部位伸缩,继而带动锁固结构对集装箱进行抓、放,本装置取消了用于挂钩移动的动力设备及其附件,减轻了夹取装置整体质量,降低了集装箱吊运的能耗。本发明的具体方案如下:
[0005]
一种无驱动自适应抓放集装箱的夹取装置,包括连接杆和两根支撑杆,两根支撑杆平行布置并经连接杆连接,每条支撑杆的两个端点均设有锁固结构;所述支撑杆为中空结构,其空腔中沿支撑杆延伸方向设有推拉杆,推拉杆与支撑杆滑动连接,可以在支撑杆的空腔中滑动;所述锁固结构下端设置用于抓取集装箱的挂钩;支撑杆的端点、推拉杆与锁固结构本体不同位置铰接,使得推拉杆沿支撑杆移动时将带动挂钩绕支撑杆端点旋转,从而抓取、卸放集装箱;所述支撑杆中部设有按压伸缩结构,所述按压伸缩结构的按压部位于支撑杆底部,所述按压伸缩结构的伸缩部位铰接有换向杆,换向杆一端与伸缩部位铰接、另一端与推拉杆铰接,用于将伸缩部位的竖直运动转换成推拉杆的水平运动;所述挂钩挂载集装箱后,所述按压部位按压操作的有效空间位于集装箱的上方,使得集装箱仍能沿挂钩上移、再次挤压按压部位完成按压操作,从而再次对挂钩进行收、放。此处按压操作的有效空间指完成按压操作必须的最短距离。当然,现有的按压伸缩结构有多种,其按压部位也存在回弹或者不回弹等多种情况,对于本领域人员来讲,确保有按压部位效操作空间位于集装箱上方的方式有多种,此处不作特殊限定,比如控制挂钩挂载集装箱后、按压部位的最低点仍位于集装箱上方。
[0006]
优选的,所述按压伸缩结构为圆珠笔伸缩结构,包括壳体、按压部位和伸缩部位,壳体用于承载按压部位和伸缩部位并与两者滑动连接,壳体与所述支撑杆固定连接;本结
构采用圆珠笔伸缩结构的原理,与可伸缩的圆珠笔相比,此伸缩部位等同于圆珠笔的笔芯,按压部位等同于圆珠笔的球状按压体,本方案中的壳体等同于圆珠笔的壳体,此类结构在圆珠笔中较为常见,如中国申请专利cn200620062269.3提供的按压式圆珠笔中便有记载,此处不再详述。
[0007]
对于锁固装置的铰接部位本发明并无特殊限定,如可以采用锁固装置的上部与推拉杆的一端铰接、中部与支撑杆端点铰接,根据杠杆原理可知,但此方式中推拉杆的水平位移与挂钩的位移几乎相等,为了使挂钩有足够活动空间能够顺利抓、放集装箱,推拉杆需要较大位移,这必然要求伸缩部位有较大伸缩空间,增大了设备尺寸,不利于减轻设备重量,对此,本发明给出了一种优选的的方式,所述锁固装置的中部与推拉杆的一端铰接、上部与支撑杆端点铰接,使得挂钩的位移量远大与推拉杆的位移量,这降低了按压伸缩结构的尺寸,进一步减少了夹取装置整体质量。
[0008]
优选的,所述推拉杆外套设了限位块,限位块与支撑杆中空腔体内壁滑动连接,这限制了推拉杆在支撑杆腔体中的晃动,使得伸缩杆的垂直移动距离可以最大化的转换成推拉杆的水平移动距离,从而进一步降低了按压伸缩结构的尺寸,减少了夹取装置整体质量,此外,推拉杆移动过程中仅限位块与支撑杆内壁滑动连接,因此,制造时确保支撑杆腔体中限位块滑动部位、限位块外壁的光洁度即可,对推拉杆的直线度、表面粗糙度无要求,降低了工作量。
[0009]
本装置使用时,集装箱顶部与按压部位接触完成按压,每次按压后,伸缩部位将在伸长、收缩两种状态之间切换一次,由于伸缩部位经铰接杆、推拉杆与锁固结构铰接,因此会进而带动锁固结构的挂钩移动,实现对集装箱的锁、放。
[0010]
本装置在制造时关键点之一是要确认好挂钩与按压部位的相对位置关系,要保证挂钩挂载集装箱起吊后,集装箱仍然有沿着挂钩向上移动的空间,并且此空间要确保能够完成对按压部位的再次按压,如此,才能顺利完成集装箱卸放。
[0011]
与现有技术相比,具有以下优点:
[0012]
(1)本发明将按压伸缩结构应用于夹取装置中,并且通过升降夹取装置过程中集装箱与按压部位的接触来实现按压,从而带动按压伸缩结构的伸缩部位伸缩,继而带动锁固结构的收、放,完成对集装箱的夹持、卸放,实现了自动夹持、卸载集装箱的功能。
[0013]
(2)本发明的夹取装置取消了用于移动锁固结构的动力设备以及配套的电缆、控制系统,降低了夹取装置整体质量、降低了集装箱吊运的能耗。
附图说明
[0014]
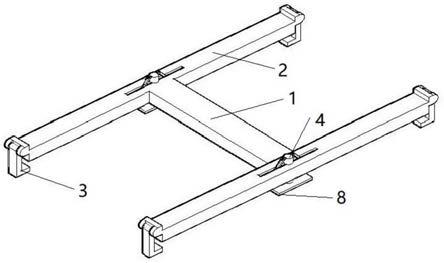
图1是本发明的整体结构示意图;
[0015]
图2是本发明整体结构的左视图;
[0016]
图3是支撑杆的半剖视图;
[0017]
图4是支撑杆端部的局部结构示意图;
[0018]
图5是按压伸缩结构示意图;
[0019]
图中,1、连接杆;2、支撑杆;3、锁固结构;4、按压伸缩结构;5、推拉杆;6、限位块;7、换向杆;8、压板;
[0020]
301、挂钩;401、壳体;402、按压部位;403、伸缩部位。
具体实施方式
[0021]
下面结合实施例及附图,对本发明作进一步地的详细说明,但本发明的实施方式不限于此。
[0022]
在本发明的描述中,需指出的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,不能理解为对本发明的限制。
[0023]
实施例:
[0024]
请参考图1和图2,图1是本发明的整体结构示意图,图2是本发明整体结构的左视图。一种无驱动自适应抓放集装箱的夹取装置,包括连接杆1和两根支撑杆2,两根支撑杆2平行布置且其中部分别与连接杆1的两个端点连接,形成一个“工”字型框架。每条支撑杆2的两端均铰接有锁固结构3,用于抓取集装箱;每条支撑杆2中部设有按压伸缩结构4,用于推动锁固结构3绕支撑杆2旋转,从而抓取、卸载集装箱。
[0025]
请参考图3,图3是支撑杆的半剖视图。支撑杆2为中空结构,其空腔中沿支撑杆2延伸方向设有推拉杆5,推拉杆5为细长圆形杆,其两端套设有限位块6,此处限位块6与推拉杆5一体成型,推拉杆5经限位块6与支撑杆2中空腔体的内壁滑动连接,限位块外壁以及限位块与支撑杆滑动的部位做打磨处理,以减少推拉干移动过程中的摩擦力。
[0026]
请参考图4,图4是支撑杆端部的局部结构示意图。锁固结构3下端设有用于抓取集装箱的挂钩301,挂钩301沿锁固结构3下端水平向外伸展,用于插入集装箱顶梁角件、完成对集装箱的抓取;锁固结构3的上端与支撑杆2的端点铰接,锁固结构3的中上部与推拉杆5的一端铰接,当推拉杆5沿支撑杆2滑动时将带动挂钩301绕支撑杆2端点旋转,从而抓取、卸载集装箱。
[0027]
请参考图5,图5是按压伸缩结构示意图。按压压伸缩结构4为圆珠笔伸缩结构,其按压伸缩原理与常规圆珠笔相同,在此,不再详细说明其具体结构,对其进行简化处理,以便简要地说明本实施例,按压压伸缩结构4包括壳体401、按压部位402和伸缩部位403;壳体401用于承载按压部位402和伸缩部位403并与两者滑动连接,壳体401与支撑杆2固定连接,按压部位402位于支撑杆2底部,用于与集装箱接触实现按压;伸缩部位403的侧壁铰接有换向杆7,换向杆7用于将伸缩部位403的垂直运动转换成推拉杆5的水平运动,换向杆7的一端与伸缩部位403铰接、另一端与推拉杆5铰接;挂钩301挂载集装箱并起吊后,按压部位402按压操作的有效空间位于集装箱上方,当集装箱到达目的地并停放后,集装箱沿挂钩301上移再次挤压按压部位402,完成对挂钩的收、放。按压部位的底部设有压板8。
[0028]
本装置初次投用时,可以人工按压按压部位使锁固装置打开。后期使用时,用处于打开状态的夹取装置去夹取集装箱,当夹取装置与集装箱顶部接触后,继续降低夹取装置高度,夹取装置在自身重力作用下下降对按压装置按压一次,完成对集装箱的夹取;当集装箱到达目的地并停放后,继续降低夹取装置高度,夹取装置在自身重力作用下下降对按压装置再次按压,完成对集装箱的卸载。卸载集装箱后的锁固装置处于打开状态,可以继续夹取其他集装箱。
[0029]
与常规装置集装箱夹取装置相比,本发明的夹取装置取消了用于锁固结构移动的动力设备以及与其配套的电缆、控制系统,采用本夹取装置的门式集装箱起重机,质量减轻
了3~5%、能耗降低了5%。
[0030]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明实施例揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1