用于平衡吊的连杆机构的制作方法
1.本实用新型涉及一种用于平衡吊的连杆机构,属于平衡吊技术领域。
背景技术:
2.平衡吊主要用于车间吊装工件或局部空间的物件移动,具有灵活、轻便、成本低等特点,目前市场的各种小型平衡吊、气动吊、机械吊、环链吊、卷扬吊等等品种多样,但基本都是靠人工推动来完成操作,极为不便,在安全方面更是存在诸多问题:一般小型吊机都是人机相互助力,工作基本是靠人工助力完成,存在人机不可分离的状况:比如借助人力转向平衡移动,不仅其操作极为不便,更重要的是这样一是极有可能带来工件滑落给人造成伤害。二是因没有液压、电机助力自锁使吊机在工作中容易自行滑动、移位,极有可能造成伤害,加大了安全隐患,给生产、给企业带来诸多不便和损失。
技术实现要素:
3.根据以上现有技术中的不足,本实用新型要解决的技术问题是:克服现有技术的不足,提供一种用于平衡吊的连杆机构,以解决上述问题。
4.本实用新型所述的用于平衡吊的连杆机构,包括由前臂、大臂、支撑臂和连接臂组成的平行四边形连杆机构,前臂可以吊钩重物,支撑臂和连接臂的铰接点连接横移油缸的活塞杆,铰接点可由横移油缸驱动进行左右移动,大臂的末端连接升降油缸的活塞杆,大臂末端可由升降油缸驱动进行升降。
5.通过一组平行四边形连杆机构、横移油缸和升降油缸配合,巧妙完成了平衡吊的前臂所吊重物的升降和重物高度不变的情况下重物水平位置的移动。具体的,当横移油缸静止时,铰接点静止,升降油缸动作可以驱动大臂绕铰接点运动,从而带动前臂和重物升降;当升降油缸静止时,横移油缸动作可以驱动铰接点水平移动,从而带动前臂和重物实现水平位置的移动,无需以往的人工拉拽;横移油缸和升降油缸也可配合同时进行动作,加上底板在立柱上的转向,实现了所吊重物的全方位移动。
6.本实用新型所述的铰接点的两侧连接横移导向滚轮,横移导向滚轮设置在横移导轨内,大臂末端的两侧连接升降导向滚轮,升降导向滚轮设置在升降导轨内,所述的横移导轨和升降导轨固定设置。横移导轨和升降导轨对对设备的运动进行水平和竖直方向的限位和定位,保证设备的稳定性。
7.优选的,本实用新型所述的支撑臂上设有缓冲胶块,缓冲胶块设置在大臂和支撑臂之间,防止工作过程中大臂和支撑臂之间产生刚性碰撞。
8.本实用新型与现有技术相比所具有的有益效果是:
9.一、通过一组平行四边形连杆机构、横移油缸和升降油缸配合,巧妙完成了平衡吊的前臂所吊重物的升降和重物高度不变的情况下重物水平位置的移动,而现有技术中的平衡吊均不具有该功能,现有技术的平衡吊均为通过人工拉拽。
10.二、可以实现全动能无线遥控,使操作者搬运工件使用方便自如,实施全过程、全
动作遥控操作。
11.三、在全时全过程起吊、搬运移动过程中无需人工伴随,从而完全防止工件滑落导致危险事故的发生,它更能符合国家日益严格的安全生产要求。
12.四、工件吊装平衡移动、旋转搬运三大功能全部实施液压助力,确保了机械手在工作过程中自动移位所带来的危险动作,使其更加稳定,为今后升级改进提升智能化重量级机器人打下良好的基础。
13.五、设计合理各项动作连环自锁,确保动作的安全性、稳定性。
14.六、省时省力、提高效率、节能降耗、减轻操作人员体力付出。
附图说明
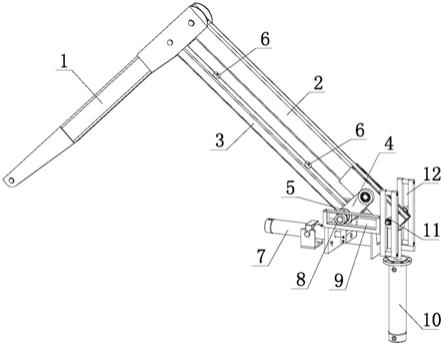
15.图1是本实用新型的结构示意图。
16.图中:1、前臂;2、大臂;3、支撑臂;4、连接臂;5、铰接点;6、缓冲胶块;7、横移油缸;8、横移导向滚轮;9、横移导轨;10、升降油缸;11、升降导向滚轮;12、升降导轨。
具体实施方式
17.下面结合实施例对本实用新型做进一步描述:
18.如图1所示,本实用新型所述的用于平衡吊的连杆机构,包括由前臂1、大臂2、支撑臂3和连接臂4组成的平行四边形连杆机构,前臂1可以吊钩重物,支撑臂3和连接臂4的铰接点5连接横移油缸7的活塞杆,铰接点5可由横移油缸7驱动进行左右移动,大臂2的末端连接升降油缸10的活塞杆,大臂2末端可由升降油缸10驱动进行升降。
19.铰接点5的两侧连接横移导向滚轮8,横移导向滚轮8设置在横移导轨9内,大臂2末端的两侧连接升降导向滚轮11,升降导向滚轮11设置在升降导轨12内,所述的横移导轨9和升降导轨12固定设置。横移导轨9和升降导轨12对对设备的运动进行水平和竖直方向的限位和定位,保证设备的稳定性。
20.支撑臂3上设有缓冲胶块6,缓冲胶块6设置在大臂2和支撑臂3之间,防止工作过程中大臂2和支撑臂3之间产生刚性碰撞。
21.通过一组平行四边形连杆机构、横移油缸7和升降油缸10配合,巧妙完成了平衡吊的前臂1所吊重物1的升降和重物1高度不变的情况下重物1水平位置的移动,而现有技术中的平衡吊均不具有该功能,现有技术的平衡吊均为通过人工拉拽。具体的,当横移油缸7静止时,铰接点5静止,升降油缸10动作可以驱动大臂2绕铰接点5运动,从而带动前臂1和重物1升降;当升降油缸10静止时,横移油缸7动作可以驱动铰接点5水平移动,从而带动前臂1和重物1实现水平位置的移动,无需以往的人工拉拽;横移油缸7和升降油缸10也可配合同时进行动作,加上底板14在立柱11上的转向,实现了所吊重物1的全方位移动。
22.本申请运行功能巧妙地设计配备由液压助力完成,主要是解决了人机作业分离操作,灵活方便,机械手功能实现智能自锁,防止无人为自行移位的不安全因素,可以完全做到全功能无线控制,工件可随意按照操作者意愿完成吊装,移位、码垛,机床上、下料等诸多工序任务,替代了单梁双梁天车的浪费、降低了天车使用频率,操作方便自如、更安全更可靠,适合企业区域作业、模块作业、流水作业,更能符合国家日益严格的安全生产需要,为企业降低运行成本,维护成本,提高了生产效率,减少和降低了安全事故的发生,从而为企业
实现平稳发展起到了关键的重要作用。
技术特征:
1.一种用于平衡吊的连杆机构,包括由前臂(1)、大臂(2)、支撑臂(3)和连接臂(4)组成的平行四边形连杆机构,前臂(1)可以吊钩重物,其特征在于:支撑臂(3)和连接臂(4)的铰接点(5)连接横移油缸(7)的活塞杆,铰接点(5)可由横移油缸(7)驱动进行左右移动,大臂(2)的末端连接升降油缸(10)的活塞杆,大臂(2)末端可由升降油缸(10)驱动进行升降。2.根据权利要求1所述的用于平衡吊的连杆机构,其特征在于:所述的铰接点(5)的两侧连接横移导向滚轮(8),横移导向滚轮(8)设置在横移导轨(9)内,大臂(2)末端的两侧连接升降导向滚轮(11),升降导向滚轮(11)设置在升降导轨(12)内,所述的横移导轨(9)和升降导轨(12)固定设置。3.根据权利要求1或2所述的用于平衡吊的连杆机构,其特征在于:所述的支撑臂(3)上设有缓冲胶块(6),缓冲胶块(6)设置在大臂(2)和支撑臂(3)之间。
技术总结
本实用新型属于平衡吊技术领域,具体涉及一种用于平衡吊的连杆机构,包括由前臂、大臂、支撑臂和连接臂组成的平行四边形连杆机构,前臂可以吊钩重物,支撑臂和连接臂的铰接点连接横移油缸的活塞杆,铰接点可由横移油缸驱动进行左右移动,大臂的末端连接升降油缸的活塞杆,大臂末端可由升降油缸驱动进行升降。通过一组平行四边形连杆机构、横移油缸和升降油缸配合,巧妙完成了平衡吊的前臂所吊重物的升降和重物高度不变的情况下重物水平位置的移动。配重和液压站设置在底板上,而不论平衡吊如何运动,底板的水平位置和角度均不随之变化,增强了稳定性,增加了安全性。增加了安全性。增加了安全性。
技术研发人员:周庆合 赵贵良
受保护的技术使用者:淄博市博山齿轮厂
技术研发日:2020.11.09
技术公布日:2021/9/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1