一种取料机械手的制作方法
1.本发明属于电子精密部件生产加工设备领域,具体为一种取料机械手。
背景技术:
2.在产品加工过程中中,尤其是精密部件如电子镜头等,需要将初加工的多种型号的部件进入下料机构,由取料机械手将物料放在加工工位进行加工,为了实现提高自动化加工效率,并且提高设备对产品不同规格适应,需要一种比较全面的机械手来实现相应的转移功能。
技术实现要素:
3.为了提高生产效率,本发明提供一种取料机械手。
4.为了达成上述的目的,本发明技术方案如下:
5.一种取料机械手,包括机械手固定座,机械手固定座上固定有机械手移动平台,机械手移动平台上设有可以沿机械手移动平台滑动的抓取横移机构,所述抓取横移机构包括夹取装置,用于将夹取装置活动固定在机械手移动平台的夹持固定座,用于控制夹取装置旋转方向的旋转电机,用于控制夹取装置在机械手移动平台上位置的移动气缸。
6.优选地,所述夹持装置、旋转电机和移动气缸均固定在夹持固定座上。
7.优选地,所述机械手移动平台活动固定在机械手固定座上并且机械手移动平台可绕机械手固定座转动。
8.优选地,所述夹取装置包括机械手臂和通过夹子气缸进行控制的气缸夹子。机械手臂可以在夹取装置上进行转动。
9.优选地,气缸夹子上设有夹指若干,多个夹指通过夹子气缸的作用进行开合。
10.优选地,所述机械手移动平台一端连接机械手固定座,另一端设有移动限位结构。
11.优选地,所述机械手固定座的一侧设有接料机构。
12.优选地,所述接料机构包括接料固定座,固定在接料固定座并可以绕下料固定座转动的z轴移动平台,固定在z轴移动平台并沿z轴移动平台移动的接料夹持结构。
13.所述接料夹持结构包括沿z轴移动平台滑动的接料滑动座和接料治具。
14.优选地,所述接料治具上设有物料定位结构。
15.本发明的优势有:本发明将机械手移动平台和接料机构上的z轴移动平台完美匹配,将接料机构上的物料通过沿机械手移动平台滑动的气缸夹子进行夹持,夹持后将物料转移到加工工位上。取料机械手可以从多个角度进行横向滑动以及气缸夹子可以实现多维度转动,扩大了对多种规格的物料适用范围。
附图说明
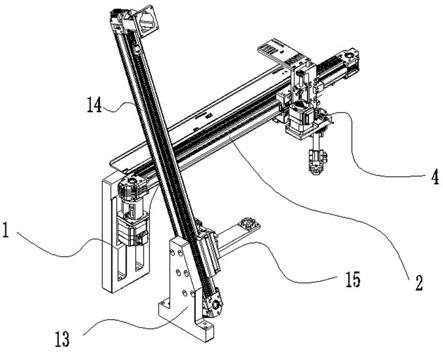
16.图1为本发明整体结构示意图;
17.图2为图1另一状态详细结构示意图;
18.图3为本发明实施例俯视角度结构示意图;
19.图4为图3机械手另一状态结构示意图。
20.图中:代表图的符号简单说明:1、机械手固定座;2、机械手移动平台;3、抓取横移机构;4、夹取装置;5、夹持固定座;6、旋转电机;7、移动气缸;8、机械手臂;9、气缸夹子;10夹子气缸;11、移动限位结构;12、接料机构;13、接料固定座;14、z轴移动平台;15、接料夹持结构;16、接料滑动座;17、接料治具;18、z轴限位结构。
具体实施方式
21.有关本发明的详细说明及技术内容,将配合图式说明如下,然而所附图式仅作为说明用途,并非用于限制本发明的范围。
22.实施例1:请参照图1至图4所示:
23.一种取料机械手,包括机械手固定座1,机械手固定座1上固定有机械手移动平台2,机械手移动平台2活动固定在机械手固定座1上并且机械手移动平台2可绕机械手固定座1转动。机械手移动平台2上设有可以沿机械手移动平台滑动的抓取横移机构3,所述抓取横移机构3包括夹取装置4,用于将夹取装置活动固定在机械手移动平台的夹持固定座5,用于控制夹取装置4旋转方向的旋转电机6,用于控制夹取装置在机械手移动平台上位置的移动气缸7,夹持装置4、旋转电机6和移动气缸7均固定在夹持固定座5上。夹持固定座5内设有和机械手移动平台2相匹配的相互滑动并可以定位的结构。
24.夹持装置4动过机械手移动平台2的转动加上其本身在机械手移动平台的移动实现多方位物料的取放。
25.夹取装置4包括机械手臂8和通过夹子气缸10进行控制的气缸夹子9。气缸夹子9固定在机械手臂8的一端,机械手臂8的另一端绕夹持装置4转动,气缸夹子上设有2-10个夹指,2-10个夹指通过夹子气缸10的作用进行开合用于物料的取放。即设置多个活动关节和可以滑动的装置,扩大气缸夹子的取放范围,也提高了气缸夹子的灵活性能。
26.机械手移动平台2一端连接机械手固定座1,另一端设有用于保护抓取横移机构在一定位置内移动的移动限位结构11。
27.机械手固定座的一侧设有接料机构12。接料机构12包括接料固定座13,固定在接料固定座13并可以绕下料固定座转动的z轴移动平台14,固定在z轴移动平台14并沿z轴移动平台移动的接料夹持结构15,接料夹持结构15包括沿z轴移动平台14滑动的接料滑动座16和接料治具17。接料治具17上设有物料定位结构18。z轴移动平台14的顶部设有z轴限位结构18,用于保护接料夹持结,15在限定位置上进行滑动。
28.本发明的原理是:接料机构将物料接到接料夹具上,气缸夹子可以在机械手移动平台上相对滑动到相应位置,然后利用机械手臂的转动和夹子的开合,将物料进行特定夹持,然后将物料放置在加工工位。如果物料为非常规物料,还可以根据需要调整机械手移动平台与地面的夹角,或调整z轴移动平台的角度。
29.本发明将机械手移动平台和接料机构上的z轴移动平台完美匹配,将接料机构上的物料通过沿机械手移动平台滑动的气缸夹子进行夹持,夹持后将物料转移到加工工位上。取料机械手可以从多个角度进行横向滑动以及气缸夹子可以实现多维度转动,扩大了对多种规格的物料适用范围。
30.综上所述,本发明具备工业实用性、新颖性与创造性,完全符合专利申请要件,现在依专利法提出申请。当然,本发明还可有其他多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明演化出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所申请专利的保护范围。
技术特征:
1.一种取料机械手,其特征在于:包括机械手固定座,机械手固定座上固定有机械手移动平台,机械手移动平台上设有可以沿机械手移动平台滑动的抓取横移机构,所述抓取横移机构包括夹取装置,用于将夹取装置活动固定在机械手移动平台的夹持固定座,用于控制夹取装置旋转方向的旋转电机,用于控制夹取装置在机械手移动平台上位置的移动气缸。2.根据权利要求1所述的取料机械手,其特征在于:所述夹取装置、旋转电机和移动气缸均固定在夹持固定座上。3.根据权利要求1所述的取料机械手,其特征在于:所述机械手移动平台活动固定在机械手固定座上并且机械手移动平台可绕机械手固定座转动。4.根据权利要求1所述的取料机械手,其特征在于:所述夹取装置包括机械手臂和通过夹子气缸进行控制的气缸夹子。5.根据权利要求4所述的取料机械手,其特征在于:气缸夹子上设有夹指若干,多个夹指通过夹子气缸的作用进行开合。6.根据权利要求1所述的取料机械手,其特征在于:所述机械手移动平台一端连接机械手固定座,另一端设有移动限位结构。7.根据权利要求1所述的取料机械手,其特征在于:所述机械手固定座的一侧设有接料机构。8.根据权利要求7所述的取料机械手,其特征在于:所述接料机构包括接料固定座,固定在接料固定座并可以绕下料固定座转动的z轴移动平台,固定在z轴移动平台并沿z轴移动平台移动的接料夹持结构。9.根据权利要求8所述的取料机械手,其特征在于:接料夹持结构包括沿z轴移动平台滑动的接料滑动座和接料治具。10.根据权利要求9所述的取料机械手,其特征在于:所述接料治具上设有物料定位结构。
技术总结
本发明提供一种取料机械手,包括机械手固定座,机械手固定座上固定有机械手移动平台,机械手移动平台上设有可以沿机械手移动平台滑动的抓取横移机构,所述抓取横移机构包括夹取装置,用于将夹取装置活动固定在机械手移动平台的夹持固定座,用于控制夹取装置旋转方向的旋转电机,用于控制夹取装置在机械手移动平台上位置的移动气缸。本发明将机械手移动平台和接料机构上的Z轴移动平台完美匹配,将接料机构上的物料通过沿机械手移动平台滑动的气缸夹子进行夹持,夹持后将物料转移到加工工位上。取料机械手可以从多个角度进行横向滑动以及气缸夹子可以实现多维度转动,扩大了对多种规格的物料适用范围。规格的物料适用范围。规格的物料适用范围。
技术研发人员:樊伟超 李澄 周泽雄 宋程洋
受保护的技术使用者:东莞市磐锐机电科技有限公司
技术研发日:2021.03.29
技术公布日:2022/2/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1