一种办公转椅的自动化生产系统
1.本实用新型涉及自动化生产领域,特别是指一种办公转椅的自动化生产系统。
背景技术:
2.目前,针对家具及办公用品行业,特别是办公转椅等产品生产线劳动用量冗余、生产操作标准化水平低、工艺流程技术方案落后等现实情况;且生产效率低下,且生产操作不规范,急需自动化生产线的设计和生产系统的升级。
技术实现要素:
3.本实用新型的主要目的在于克服现有技术中的上述缺陷,提出一种办公转椅的自动化生产系统,提供了办公转椅的全产业链生产系统,能够提升生产效率和规范生产工艺。
4.本实用新型采用如下技术方案:
5.一种办公转椅的自动化生产系统,包括:传送带,转椅生产线,机器人,图像采集器,控制总线,图像处理器,机器视觉系统,工控计算机,工业机器人运动控制系统和监控显示模块;所述机器人包括探头、机械臂;
6.所述传送带将转椅的生产原料实现自动上料,进入转椅生产线;
7.所述机器人的探头对转椅生产线上的转椅的生产原料进行探测,并将探测到的图像输入图像采集器;
8.图像采集器采集图像并通过控制总线传入图像处理器,经由机器视觉系统,将识别到的图像结果传入工控计算机;
9.工控计算机的输出接口连接工业机器人的输入接口,用于将工业机器人运动控制系统中的指令输入到工业机器人中,控制机器人的机械臂完成相关的打孔、铆钉、喷胶、贴棉操作;
10.监控显示模块用于显示转椅生产线的生产状况,显示传送带和生产工序是否正常运行。
11.具体地,所述图像采集器包括光源与ccd摄像机。
12.具体地,所述监控显示模块为监控显示界面。
13.具体地,所述监控界面包括侧边显示栏、顶部信息栏、运动控制面板模块、视觉控制面板模块、显示面板模块。
14.由上述对本实用新型的描述可知,与现有技术相比,本实用新型具有如下有益效果:
15.(1)本实用新型公开了一种办公转椅的自动化生产系统,包括:传送带,转椅生产线,机器人,图像采集器,控制总线,图像处理器,机器视觉系统,工控计算机,工业机器人运动控制系统和监控显示模块;所述机器人包括探头、机械臂;所述传送带将生产原料传入转椅生产线;所述机器人的探头生产原料进行探测,并输入图像采集器;图像采集器采集图像并通过控制总线传入图像处理器,经由机器视觉系统,将识别到的图像结果传入工控计算
机;工控计算机的输出接口连接工业机器人的输入接口,用于将工业机器人运动控制系统中的指令输入到工业机器人中,控制机械臂完成操作;监控显示模块用于显示转椅生产线的生产状况。本实用新型提供了办公转椅的全产业链生产系统,能够提升生产效率和规范生产工艺。
附图说明
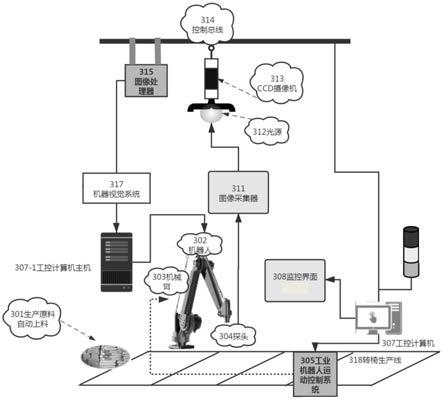
16.图1为本实用新型提供的办公转椅的自动化生产系统的架构图;
具体实施方式
17.以下通过具体实施方式对本实用新型作进一步的描述。
18.本实用新型为克服目前转椅生产线中劳动用量冗余、生产操作标准化水平低、工艺流程技术方案落后等现实情况;且生产效率低下,且生产操作不规范,提出一种办公转椅的自动化生产系统,提供了办公转椅的全产业链生产系统,能够提升生产效率和规范生产工艺。
19.一种办公转椅的自动化生产系统,包括:传送带,转椅生产线,机器人,图像采集器,控制总线,图像处理器,机器视觉系统,工控计算机,工业机器人运动控制系统和监控显示模块;所述机器人包括探头、机械臂;
20.所述传送带将转椅的生产原料实现自动上料,进入转椅生产线;
21.所述机器人的探头对转椅生产线上的转椅的生产原料进行探测,并将探测到的图像输入图像采集器;
22.图像采集器采集图像并通过控制总线传入图像处理器,经由机器视觉系统,将识别到的图像结果传入工控计算机;
23.工控计算机的输出接口连接工业机器人的输入接口,用于将工业机器人运动控制系统中的指令输入到工业机器人中,控制机器人的机械臂完成相关的打孔、铆钉、喷胶、贴棉操作;
24.监控显示模块用于显示转椅生产线的生产状况,显示传送带和生产工序是否正常运行。
25.具体地,所述图像采集器包括光源与ccd摄像机。
26.具体地,所述监控显示模块为监控显示界面。
27.具体地,所述监控界面包括侧边显示栏、顶部信息栏、运动控制面板模块、视觉控制面板模块、显示面板模块。
28.具体实施例,如图1所示,展现了本申请实施例提供的办公转椅自动化生产的硬件部分组成图。首先,通过传送带对转椅的生产原料实现自动上料301,进入转椅生产线,由生产系统执行相关工艺操作,具体步骤为:机器人302中的探头对转椅生产中的木板等进行识别,识别到的图像进入图像采集器311,图像采集系统包括了光源312与ccd摄像机313,采集到的图像经过控制总线314,传入到图像处理器315,再经由的机器视觉系统317,将识别到的图像结果传入工控计算机主机307-1,工控计算机307的输出接口连接工业机器人302的输入接口,用于将工业机器人运动控制系统305中的指令输入到工业机器人302中,控制工业机器人302的机械臂303完成相关的打孔、铆钉、喷胶、贴棉操作;监控显示模块中监控界
面308用于显示转椅生产线的生产状况,显示传送带和生产工序是否正常运行。
29.所述监控显示模块为监控显示界面,所述监控界面包括侧边显示栏、顶部信息栏、运动控制面板模块、视觉控制面板模块、显示面板模块。
30.本实用新型公开了一种办公转椅的自动化生产系统,包括:传送带,转椅生产线,机器人,图像采集器,控制总线,图像处理器,机器视觉系统,工控计算机,工业机器人运动控制系统和监控显示模块;所述机器人包括探头、机械臂;所述传送带将生产原料传入转椅生产线;所述机器人的探头生产原料进行探测,并输入图像采集器;图像采集器采集图像并通过控制总线传入图像处理器,经由机器视觉系统,将识别到的图像结果传入工控计算机;工控计算机的输出接口连接工业机器人的输入接口,用于将工业机器人运动控制系统中的指令输入到工业机器人中,控制机械臂完成操作;监控显示模块用于显示转椅生产线的生产状况。本实用新型提供了办公转椅的全产业链生产系统,能够提升生产效率和规范生产工艺。
31.上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
技术特征:
1.一种办公转椅的自动化生产系统,其特征在于,包括:传送带,转椅生产线,机器人,图像采集器,控制总线,图像处理器,机器视觉系统,工控计算机,工业机器人运动控制系统和监控显示模块;所述机器人包括探头、机械臂;所述传送带将转椅的生产原料实现自动上料,进入转椅生产线;所述机器人的探头对转椅生产线上的转椅的生产原料进行探测,并将探测到的图像输入图像采集器;图像采集器采集图像并通过控制总线传入图像处理器,经由机器视觉系统,将识别到的图像结果传入工控计算机;工控计算机的输出接口连接工业机器人的输入接口,用于将工业机器人运动控制系统中的指令输入到工业机器人中,控制机器人的机械臂完成打孔、铆钉、喷胶、贴棉操作;监控显示模块用于显示转椅生产线的生产状况,显示传送带和生产工序是否正常运行。2.根据权利要求1所述的一种办公转椅的自动化生产系统,其特征在于,所述图像采集器包括光源与ccd摄像机。3.根据权利要求1所述的一种办公转椅的自动化生产系统,其特征在于,所述监控显示模块为监控显示界面。4.根据权利要求3所述的一种办公转椅的自动化生产系统,其特征在于,所述监控显示界面包括侧边显示栏、顶部信息栏、运动控制面板模块、视觉控制面板模块、显示面板模块。
技术总结
本实用新型公开了一种办公转椅的自动化生产系统,包括:传送带,转椅生产线,机器人,图像采集器,控制总线,图像处理器,机器视觉系统,工控计算机,工业机器人运动控制系统和监控显示模块;所述机器人包括探头、机械臂;所述传送带将生产原料传入转椅生产线;所述机器人的探头生产原料进行探测,并输入图像采集器;图像采集器采集图像并通过控制总线传入图像处理器,经由机器视觉系统,将识别到的图像结果传入工控计算机;工控计算机的输出接口连接工业机器人的输入接口,用于将工业机器人运动控制系统中的指令输入到工业机器人中,控制机械臂完成操作;监控显示模块用于显示转椅生产线的生产状况。本实用新型提供了办公转椅的全产业链生产系统,能够提升生产效率和规范生产工艺。工艺。工艺。
技术研发人员:曾念寅 吴佩树 谢路生 李寒
受保护的技术使用者:厦门大学
技术研发日:2021.04.12
技术公布日:2022/5/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1