一种钢铁行业盘条无人值守智能立体库的制作方法
1.本实用新型涉及一种钢铁行业盘条无人值守智能立体库,属于钢铁生产存储技术领域。
背景技术:
2.在工业4.0时代,自动化智能立体仓储是生产的最大趋势。随着社会的发展,钢铁盘条产品越来越趋向专业化和定制化,产品批次越来越小,产品的规格和钢种越来越多,土地的利用越来越严格。这样一种新型的用于盘条的智能仓储系统应运而生。现有的钢铁行业存储仓库大多占地面积较大,采用人工出库方式,工作效率低下,容错率低,而且仓储出货混乱,极易造成出错,致使生产效率大幅度降低。
3.综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现要素:
4.本实用新型要解决的技术问题是针对以上不足,提供一种钢铁行业盘条无人值守智能立体库,能够有效地减少占地面积,减少在存储盘条中可能会出现的差错,提高了工作效率。
5.一种优化方案,一种钢铁行业盘条无人值守智能立体库,包括盘条存储货架、电控液压系统、堆垛机系统和无人智能行车系统;
6.所述的电控液压系统连接控制有举升及旋转行车;
7.所述的电控液压系统控制举升及旋转行车运行将盘条运送至盘条存储货架;
8.所述的盘条存储货架上设有自动扫描器;
9.所述的动扫描器连接有数据库;
10.所述的自动扫描器通过扫描盘条上的条码确认盘条信息;
11.所述的自动扫描器将盘条信息输送至数据库中;
12.所述的堆垛机系统连接控制有提升机;
13.所述的堆垛机系统通过控制提升机并根据数据库反馈信息将盘条有序单件放入盘条存储货架;
14.所述的无人智能行车系统连接控制有穿梭机;
15.所述的提升机将需要出库的盘条运送至穿梭机位置。
16.进一步地,所述的无人智能行车系统控制穿梭机将需要出库的盘条通过运输车运输出库;
17.所述的运输车停车位置安装有装载行车;
18.所述的装载行车用于装载盘条。
19.进一步地,所述的无人智能行车系统能够识别穿梭车和运输车;
20.所述的无人智能行车系统通过数据库反馈信息识别校对穿梭车和运输车装载盘条。
21.本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
22.智能立体库采用自动化管理技术实现了无人智能出入库及存储,使得盘条便于查找,比传统仓库的占地面积小,空间利用率大,通过计算机对盘条进行准确无误的信息管理,减少了在存储盘条中可能会出现的差错,提高了工作效率;在入库、出库的盘条运送中全程机动化,搬运安全可靠;存储盘条一件一位,避免了盘条叠压;有效地与库外生产线实现无缝衔接,减少了盘条从下线到出、入库的人为倒运环节,结合自动化存储物流系统,凭借高效的存取能力,形成了有计划,有编排的生产链,使生产能力,效率大幅度提升。
附图说明
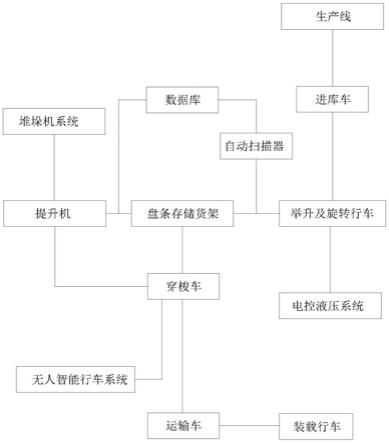
23.图1是本实用新型一种钢铁行业盘条无人值守智能立体库的结构示意图。
具体实施方式
24.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图说明本实用新型的具体实施方式。
25.实施例1,如图1所示,本实用新型提供一种钢铁行业盘条无人值守智能立体库,包括盘条存储货架、电控液压系统、堆垛机系统和无人智能行车系统;
26.所述的电控液压系统连接控制有举升及旋转行车,生产线产出的盘条通过进库车输送至举升及旋转行车处,电控液压系统控制举升及旋转行车运行将盘条运送至盘条存储货架;
27.所述的盘条存储货架上设有自动扫描器,所述的动扫描器连接有数据库,所述的自动扫描器通过扫描盘条上的条码确认盘条信息,自动扫描器将盘条信息输送至数据库中;
28.所述的堆垛机系统连接控制有提升机;所述的堆垛机系统通过控制提升机并根据数据库反馈信息将盘条有序单件放入盘条存储货架;
29.所述的无人智能行车系统连接控制有穿梭机;
30.所述的数据库能够通过堆垛机系统向提升机反馈信号将需要出库的盘条进行抓取,所述的提升机将需要出库的盘条运送至穿梭机位置。
31.所述的无人智能行车系统控制穿梭机将需要出库的盘条通过运输车运输出库,所述的运输车停车位置安装有装载行车,所述的装载行车用于装载盘条。所述的无人智能行车系统能够识别穿梭车和运输车,所述的无人智能行车系统通过数据库反馈信息识别校对穿梭车和运输车装载盘条,防止装载盘条信息出错。
32.本实用新型的工作原理:
33.生产线生产的盘条通过进库车运送至举升及旋转行车位置,电控液压系统控制举升及旋转行车将盘条输送至盘条存储货架位置,自动扫描器扫描盘条的条码,并存储入数据库中,而后盘条通过堆垛机系统控制的提升机将盘条有序单个的放入盘条存储货架位置中。
34.需要出货时,数据库接收命令,而后反馈给堆垛机系统,堆垛机系统控制的提升机将需要出库的盘条抓取并送至指定的穿梭车位置,无人智能行车系统识别穿梭车型号和车牌等信息,确认后穿梭车启动并将盘条输送至运输车位置,此时无人智能行车系统识别运
输车型号和车牌号等信息,待无人智能行车系统确认与穿梭车型号和车牌号信息符合后,装载行车开始将盘条装载至运输车中。
35.以上所述为本实用新型最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本实用新型的保护范围以权利要求的内容为准,任何基于本实用新型的技术启示而进行的等效变换,也在本实用新型的保护范围之内。
技术特征:
1.一种钢铁行业盘条无人值守智能立体库,其特征在于:包括盘条存储货架、电控液压系统、堆垛机系统和无人智能行车系统;所述的电控液压系统连接控制有举升及旋转行车;所述的电控液压系统控制举升及旋转行车运行将盘条运送至盘条存储货架;所述的盘条存储货架上设有自动扫描器;所述的动扫描器连接有数据库;所述的自动扫描器通过扫描盘条上的条码确认盘条信息;所述的自动扫描器将盘条信息输送至数据库中;所述的堆垛机系统连接控制有提升机;所述的堆垛机系统通过控制提升机并根据数据库反馈信息将盘条有序单件放入盘条存储货架;所述的无人智能行车系统连接控制有穿梭机;所述的提升机将需要出库的盘条运送至穿梭机位置。2.根据权利要求1所述的一种钢铁行业盘条无人值守智能立体库,其特征在于:所述的无人智能行车系统控制穿梭机将需要出库的盘条通过运输车运输出库;所述的运输车停车位置安装有装载行车;所述的装载行车用于装载盘条。3.根据权利要求1所述的一种钢铁行业盘条无人值守智能立体库,其特征在于:所述的无人智能行车系统能够识别穿梭车和运输车;所述的无人智能行车系统通过数据库反馈信息识别校对穿梭车和运输车装载盘条。
技术总结
本实用新型公开一种钢铁行业盘条无人值守智能立体库,包括盘条存储货架、电控液压系统、堆垛机系统和无人智能行车系统;所述的电控液压系统连接控制有举升及旋转行车;所述的电控液压系统控制举升及旋转行车运行将盘条运送至盘条存储货架;本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:智能立体库采用自动化管理技术实现了无人智能出入库及存储,使得盘条便于查找,减少了在存储盘条中可能会出现的差错,提高了工作效率;结合自动化存储物流系统,凭借高效的存取能力,形成了有计划,有编排的生产链,使生产能力,效率大幅度提升。大幅度提升。大幅度提升。
技术研发人员:李炳峰 杨鑫
受保护的技术使用者:潍坊特钢集团有限公司
技术研发日:2021.04.30
技术公布日:2021/12/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1