一种托盘搬运机器人的制作方法
1.本实用新型涉及一种搬运机器人领域,特别涉及一种托盘搬运机器人。
背景技术:
2.传统意义上的叉车主体是由叉车驱动部分和门架货叉部分组成的。叉车在工作时叉车驱动部分加上托盘(或货架)尺寸组成了物流通道所需的基础尺寸。
3.原则上讲,叉车的驱动部分所占用的物流通道空间是毫无意义且浪费的。因此减小或去除驱动部分尺寸就意味着减小了物流通道,也就达到了提高仓库有效存储面积减小物流通道的目的。
4.传统叉车受限于驱动部分的模块尺寸限制,无法在极小空间内布置驱动。市面上的托盘搬运机器人都是在传统叉车结构上改装而来,因此没有办法解决上述问题。
技术实现要素:
5.本实用新型的主要目的在于提供了一种托盘搬运机器人,方便检测螺钉为铁磁材料,产品本体为非铁磁材料的产品,可以在产品处于非打开状态下,检测出产品内是否漏锁或有多余螺丝在被测件内。
6.为实现上述目的,本实用新型采取的技术方案为:
7.一种托盘搬运机器人,包括机器人本体,该机器人本体下端固定安装有轮式结构,该轮式结构固定连接有动力电机,该动力电机固定连接有电池,该动力电机和电池固定安装在机器人本体内,该机器人本体的一侧固定开设有充电槽,该充电槽内固定安装有自动充电连接装置,该自动充电连接装置与电池固定连接,该机器人本体的一侧固定安装有导航激光传感器,该机器人本体上端面固定开设有两个定位滑槽,该定位滑槽内固定安装有取放料装置,该定位滑槽之间的机器人本体上固定安装有3d校准相机,该机器人本体上端面两侧固定安装有传感器装置。
8.进一步的,所述机器人本体上还固定安装有人机界面,该人机界面与电池固定连接。
9.进一步的,所述机器人本体临近取放料装置的一端侧端面上固定安装有超声波避障传感器,该机器人四角处固定安装有接触式压力传感器。
10.进一步的,所述取放料装置包括导向滑轨,主伸缩臂,副伸缩臂和抬升架,该导向滑轨固定安装在定位滑槽内,该导向滑轨上固定连接有主伸缩臂,该主伸缩臂上固定连接有副伸缩臂,该副伸缩臂上固定安装有抬升架。
11.进一步的,所述副伸缩架远离主伸缩臂的一端固定安装有红外避障传感器。
12.更进一步的,所述机器人本体两侧的侧端面上固定安装有急停按钮,该机器人本体上还固定安装有调试端口。
13.与现有技术相比,本实用新型的有益效果为:
14.本实用新型在物流规划时可以完全不用考虑托盘搬运设备带来的物流通道与托
盘存放空间的浪费,即使在狭窄空间或者复杂存放的生产现场,仍然能够使用,特别是在一些特殊场景,本实用新型的所有驱动均为电机,不会对环境造成污染。
附图说明
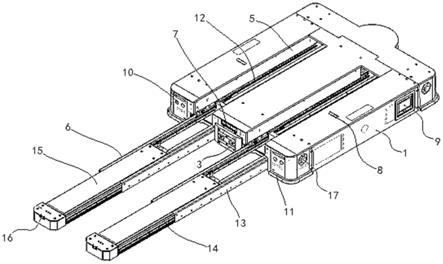
15.图1为本实用新型的立体图;
16.图2为本实用新型的展开后的主视图;
17.图3为本实用新型的立体图。
18.附图标记
19.1.机器人本体;3.自动充电连接装置;4.导航激光传感器;5.定位滑槽;6.取放料装置;7.3d校准相机;8.传感器装置;9.人机界面;10.超声波避障传感器;11.接触式压力传感器;12.导向滑轨;13.主伸缩臂;14.副伸缩臂;15.抬升架;16.红外避障传感器;17.急停按钮;18.调试端口。
具体实施方式
20.下面结合附图对本实用新型的较佳实施例作详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围作出更为清楚明确的界定。
21.参见图1-3所示,一种托盘搬运机器人,包括机器人本体1,该机器人本体1下端固定安装有轮式结构,该轮式结构固定连接有动力电机,该动力电机固定连接有电池,该动力电机和电池固定安装在机器人本体1内,该机器人本体1的一侧固定开设有充电槽,该充电槽内固定安装有自动充电连接装置3,该自动充电连接装置3与电池固定连接,该机器人本体1的一侧固定安装有导航激光传感器4,该机器人本体1上端面固定开设有两个定位滑槽5,该定位滑槽5内固定安装有取放料装置6,该定位滑槽5之间的机器人本体1上固定安装有3d校准相机7,该机器人本体1上端面两侧固定安装有传感器装置8。
22.所述机器人本体1上还固定安装有人机界面9,该人机界面9与电池固定连接。
23.所述机器人本体1临近取放料装置6的一端侧端面上固定安装有超声波避障传感器10,该机器人四角处固定安装有接触式压力传感器11。
24.所述取放料装置6包括导向滑轨12,主伸缩臂13,副伸缩臂14和抬升架15,该导向滑轨12固定安装在定位滑槽5内,该导向滑轨12上固定连接有主伸缩臂13,该主伸缩臂13上固定连接有副伸缩臂14,该副伸缩臂14上固定安装有抬升架15。
25.所述副伸缩架远离主伸缩臂13的一端固定安装有红外避障传感器16。
26.所述机器人本体1两侧的侧端面上固定安装有急停按钮17,该机器人本体1上还固定安装有调试端口18。
27.为了实现托盘搬运,机器人本体1通过电机带动轮式结构来实现托盘的位移。机器人本体1中安装有电池,通过电池给电机提供动力源,机器人可以通过软件控制,通过自动充电装置,完成自动充电,从而实现电池的持续供电以及整个系统的持续循环运行。
28.为了实现机器人本体1的自动导航,在搬运小车的车头位置安装有导航激光传感器4,通过导航激光的扫描实现机器人的自动引导运行,同时导航激光传感器4可以提供障碍物识别功能,保证机器人安全运行,为了减小机器人本体1的整体尺寸,机器人的驱动轮
被布置在两侧中间的位置,取放料装置6被设计在机器人尾部,同时主伸缩臂13和副伸缩臂14带伸缩功能,在机器人本体1移动时可以将主伸缩臂13和副伸缩臂14收回。
29.机器人本体1在取放托盘过程中,通过传感器装置8检测托盘是否到位。
30.为保证机器人本体1自动运行时能准确对齐托盘的叉齿孔,在机器人本体1的尾部安装有3d相机,通过3d相机对托盘轮廓的识别,可以让机器人本体1自动与托盘的叉齿孔对齐。
31.为保证机器人本体1的安全运行,在小车上同时安装有超声波避障传感器10,红外避障传感器16以及接触式压力传感器11,再配合激光传感器组成整个机器人的安全防护网络,紧急情况时还可以通过人工使用急停按钮17紧急制动agv搬运小车
32.需要说明的是,本实用新型在物流规划时可以完全不用考虑托盘搬运设备带来的物流通道与托盘存放空间的浪费。即使在狭窄空间或者复杂存放的生产现场,仍然能够使用。特别是在一些特殊场景,例如食品,医药生产环境中,传统叉车或叉车结构机器人的漏油风险很高,本实用新型的所有驱动均为电机,不会对环境造成污染。
33.以上所述仅为本实用新型的较佳实施方式,本实用新型的保护范围并不以上述实施方式为限,但凡本领域普通技术人员根据本实用新型所揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。
技术特征:
1.一种托盘搬运机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)下端固定安装有轮式结构,该轮式结构固定连接有动力电机,该动力电机固定连接有电池,该动力电机和电池固定安装在机器人本体(1)内,该机器人本体(1)的一侧固定开设有充电槽,该充电槽内固定安装有自动充电连接装置(3),该自动充电连接装置(3)与电池固定连接,该机器人本体(1)的一侧固定安装有导航激光传感器(4),该机器人本体(1)上端面固定开设有两个定位滑槽(5),该定位滑槽(5)内固定安装有取放料装置(6),该定位滑槽(5)之间的机器人本体(1)上固定安装有3d校准相机(7),该机器人本体(1)上端面两侧固定安装有传感器装置(8)。2.根据权利要求1所述的一种托盘搬运机器人,其特征在于:所述机器人本体(1)上还固定安装有人机界面(9),该人机界面(9)与电池固定连接。3.根据权利要求1所述的一种托盘搬运机器人,其特征在于:所述机器人本体(1)临近取放料装置(6)的一端侧端面上固定安装有超声波避障传感器(10),该机器人四角处固定安装有接触式压力传感器(11)。4.根据权利要求1所述的一种托盘搬运机器人,其特征在于:所述取放料装置(6)包括导向滑轨(12),主伸缩臂(13),副伸缩臂(14)和抬升架(15),该导向滑轨(12)固定安装在定位滑槽(5)内,该导向滑轨(12)上固定连接有主伸缩臂(13),该主伸缩臂(13)上固定连接有副伸缩臂(14),该副伸缩臂(14)上固定安装有抬升架(15)。
技术总结
本实用新型公开了一种托盘搬运机器人,包括机器人本体,该机器人本体下端固定安装有轮式结构,该轮式结构固定连接有动力电机,该动力电机固定连接有电池,该动力电机和电池固定安装在机器人本体内,该机器人本体的一侧固定开设有充电槽,该充电槽内固定安装有自动充电连接装置,该自动充电连接装置与电池固定连接,该机器人本体的一侧固定安装有导航激光传感器,该机器人本体上端面固定开设有两个定位滑槽,该定位滑槽内固定安装有取放料装置,该定位滑槽之间的机器人本体上固定安装有3D校准相机,该机器人本体上端面两侧固定安装有传感器装置,可以提高仓库的有效存储面积,减小物流通道,以及解决狭窄空间内托盘(或料架)的密集存储与搬运问题。密集存储与搬运问题。密集存储与搬运问题。
技术研发人员:丁翔 刘飞
受保护的技术使用者:苏州天天供应链管理有限公司
技术研发日:2021.09.03
技术公布日:2022/4/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1