产品取放结构的制作方法
产品取放结构
【技术领域】
1.本发明涉及自动化生产技术领域,具体是涉及一种产品取放结构。
背景技术:
2.塑胶产品在注塑成型后,需要取放结构将塑胶产品从注塑模具中取出。现有技术中,采用的取放结构通常包括机械手臂及铝板,在铝板上铣孔后,在孔中通过金具锁附吸盘或夹子,在产品成型后,机械手臂带动铝板对产品和料头进行夹取或吸附取出,然后将产品放置到承接产品的平台上。
3.然而,现有技术中的取放结构,铝板只能对应取出一种产品,金具、吸盘及夹子灵活调整空间比较小,铝板与机械手臂固定位置只能做成固定孔位,导致整个取放结构调节困难,因此,在取放不易定位的产品时,例如小件产品、吸附面小的产品或具有弧形面的产品等,取放操作周期长。
4.有鉴于此,实有必要开发一种产品取放结构,以解决上述问题。
技术实现要素:
5.因此,本发明的目的是提供一种产品取放结构,该产品取放结构能够取放不易定位的产品,缩短取放周期。
6.为了达到上述目的,本发明采用以下技术方案:
7.一种产品取放结构,包括:
8.机械手臂;
9.取放盒,其具有侧壁及底壁,所述侧壁上开设有进口用于接产品,所述底壁具有出口用于漏出产品,所述机械手臂的一端固定于所述侧壁上;
10.气缸,固定于底壁上,所述气缸具有伸缩运动的推杆;
11.挡板,其与推杆连接,所述气缸驱动挡板运动挡着所述出口或露出所述出口。
12.进一步地,所述取放盒具有四个侧壁,各该侧壁与其相邻的两个侧壁垂直设置。
13.更进一步地,所述四个侧壁中,其中一侧壁的顶端低于其余侧壁的顶端形成开口。
14.更进一步地,所述取放盒的底壁倾斜设置。
15.进一步地,所述取放盒固定机械手臂一端的侧壁为铝板,其余侧壁为透明亚力克板,所述底壁及挡板为透明亚克力板。
16.进一步地,所述挡板挡着所述出口,所述产品掉落至取放盒中,所述挡板露出所述出口,所述产品从取放盒中掉出。
17.相较于现有技术,本发明的产品取放结构,通过设置机械手臂、取放盒、气缸及挡板,产品在注塑模具中成型后,产品取放结构的机械手臂带动取放盒至注塑模具处,产品掉落至取放盒中,然后机械手臂带动取放盒移出注塑模具至承接产品的平台处,气缸带动挡板运动不再挡着所述出口,所述产品从出口处掉落至承接产品的平台上,因此,本发明的产品取放结构,对产品结构不受限制,能够取放不易定位的产品,缩短了取放周期,取放周期
能够缩短5秒以上。
【附图说明】
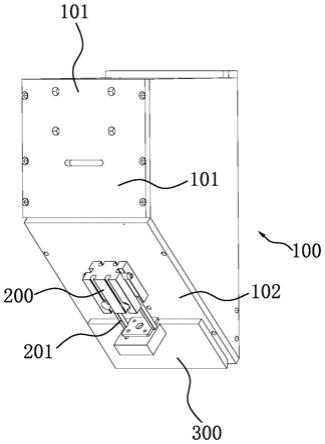
18.图1绘示本发明产品取放结构一状态第一角度的示意图。
19.图2绘示本发明产品取放结构中取放盒的示意图。
20.图3绘示本发明产品取放结构一状态第二角度示意图。
21.图4绘示本发明产品取放结构一状态第三角度示意图。
22.图5绘示本发明产品取放结构另一状态第一角度示意图。
23.图6绘示本发明产品取放结构另一状态第二角度示意图。
【具体实施方式】
24.为对本发明的目的、技术功效及技术手段有进一步的了解,现结合附图详细说明如下。
25.请参阅图1至图4所示,本发明提供一种产品取放结构,用于从注塑模具中取产品并将产品放置至承接产品的平台上,于一较佳实施例中,所述产品取放结构包括:
26.机械手臂(图未示);
27.取放盒100,所述取放盒100具有侧壁101及底壁102,所述侧壁101上开设有进口103用于从注塑模具中接产品,所述底壁102具有出口104用于漏出产品,所述机械手臂的一端固定于所述侧壁101上,因而所述机械手臂带动取放盒100运动至注塑模具中,或所述机械手臂带动取放盒100运动至承接产品的平台处;
28.气缸200,固定于底壁102上,所述气缸200具有伸缩运动的推杆201;
29.挡板300,其与推杆201连接,所述气缸200驱动挡板300运动挡着所述出口104或露出所述出口104。
30.其中,所述取放盒100具有四个侧壁101,各该侧壁101与其相邻的两个侧壁101垂直设置,所述取放盒100的底壁102倾斜设置,方便产品从底壁102上滑落下来;而且,所述四个侧壁101中,其中一侧壁101的顶端低于其余侧壁101的顶端形成开口103,所述开口103所在面与注塑模具的模面贴合,方便接产品。
31.其中,所述取放盒100固定机械手臂一端的侧壁101为铝板,所述铝板方能够将机械手臂一端稳固固定于其上,而其余侧壁101设置为透明亚力克板,所述底壁102及挡板300设置为透明亚克力板,不仅方便观察取放盒100中的产品,而且相较于铝板成本较低。
32.请参阅图1所示,所述挡板300挡着所述出口104,所述产品掉落至取放盒100中,请参阅图5所示,所述挡板300露出所述出口104,所述产品从取放盒100中掉出。
33.本发明的产品取放结构,具体工作过程为:如图1所示,产品在注塑模具中成型并顶出后,所述产品取放结构的机械手臂带动取放盒100至注塑模具处,产品从取放盒100的开口103处掉落至取放盒100中,产品从底壁102上滑落;然后机械手臂带动取放盒100移出注塑模具至承接产品的平台处,如图5及图6所示,气缸200动作使推杆201缩回,带动挡板300运动不再挡着所述出口104,所述出口104露出,所述产品从出口104处掉落至承接产品的平台上。
34.综上所述,本发明的产品取放结构,通过设置机械手臂、取放盒100、气缸200及挡
板300,无论产品为小件产品、吸附面小的产品或具有弧形面的产品等,本发明的产品取放结构均能取放,因而对产品结构不受限制,能够取放不易定位的产品,缩短了取放周期,取放周期能够缩短5秒以上。
35.需指出的是,本发明不限于上述实施方式,任何熟悉本专业的技术人员基于本发明技术方案对上述实施例所作的任何简单修改,等同变化与修饰均落入本发明的保护范围。
技术特征:
1.一种产品取放结构,其特征在于,包括:机械手臂;取放盒,其具有侧壁及底壁,所述侧壁上开设有进口用于接产品,所述底壁具有出口用于漏出产品,所述机械手臂的一端固定于所述侧壁上;气缸,固定于底壁上,所述气缸具有伸缩运动的推杆;挡板,其与推杆连接,所述气缸驱动挡板运动挡着所述出口或露出所述出口。2.根据权利要求1所述的产品取放结构,其特征在于,所述取放盒具有四个侧壁,各该侧壁与其相邻的两个侧壁垂直设置。3.根据权利要求2所述的产品取放结构,其特征在于,所述四个侧壁中,其中一侧壁的顶端低于其余侧壁的顶端形成开口。4.根据权利要求2所述的产品取放结构,其特征在于,所述取放盒的底壁倾斜设置。5.根据权利要求1所述的产品取放结构,其特征在于,所述取放盒固定机械手臂一端的侧壁为铝板,其余侧壁为透明亚力克板,所述底壁及挡板为透明亚克力板。6.根据权利要求1所述的产品取放结构,其特征在于,所述挡板挡着所述出口,所述产品掉落至取放盒中,所述挡板露出所述出口,所述产品从取放盒中掉出。
技术总结
本发明涉及自动化生产技术领域,具体是涉及一种产品取放结构。产品取放结构,包括:机械手臂;取放盒,其具有侧壁及底壁,所述侧壁上开设有进口用于接产品,所述底壁具有出口用于漏出产品,所述机械手臂的一端固定于所述侧壁上;气缸,固定于底壁上,所述气缸具有伸缩运动的推杆;挡板,其与推杆连接,所述气缸驱动挡板运动挡着所述出口或露出所述出口。本发明的产品取放结构,对产品结构不受限制,能够取放不易定位的产品,缩短了取放周期,取放周期能够缩短5秒以上。缩短5秒以上。缩短5秒以上。
技术研发人员:聂松涛 孙治国
受保护的技术使用者:汉达精密电子(昆山)有限公司
技术研发日:2020.10.28
技术公布日:2022/4/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1