空气质量控制系统和方法与流程
[0001]
本发明涉及空气质量的控制。本发明特别地涉及到室内空间中的空气质量,并且特别地涉及与悬浮灰尘有关的空气质量问题。
背景技术:
[0002]
空气质量是人们越来越关注的问题,并且对空气质量监测和控制的兴趣普遍增加。
[0003]
关于室内空气质量,归因于人类和自主设备活动(诸如真空吸尘器)的灰尘的再悬浮是降低室内空气质量的主要原因。
[0004]
灰尘的再悬浮受许多因素影响,诸如灰尘负荷、表面类型、活动类型和相对湿度水平。这些参数中的每个参数对灰尘再悬浮特点的影响也可以根据其他因素而改变。例如,较高的相对湿度以相反的方式影响不同表面类型的灰尘再悬浮特点,会增强地毯上的再悬浮并且降低硬地面上的再悬浮。
[0005]
住宅内的不同区域可能具有不同的地面类型,这些地面类型有不同的灰尘再悬浮特点,该特点受该区域内相对湿度的强烈影响。例如,一台加湿器可以控制厨房和生活区域两者的相对湿度,该厨房和生活区域分别具有硬地面类型和软地面类型。
[0006]
有几种能够测量、识别或者预测智能住宅中的用户位置和活动的新设备和技术。该分析允许自动化智能住宅系统适于用户的活动和例行事务。例如,已知系统使用波束成形麦克风阵列来收听整个房间的声音,这可以用于非侵入性地确定常见的用户活动。
[0007]
当前,室内环境中的灰尘再悬浮主要由表面清洁的频率控制。清洁频率改变沉积在表面上的平均灰尘负荷,并且因此改变归因于其他活动而再悬浮的颗粒物的数量。然而,即使是清洁活动本身也会引起灰尘再悬浮,并且因此可能会降低空气质量。
[0008]
已知为了减少过敏原的目的而控制室内相对湿度,例如us7264649中所公开的。相对湿度控制用于通过相对湿度对尘螨种群的影响来降低房屋灰尘的免疫原性。然而,这并没有认识到灰尘再悬浮的问题。
[0009]
在《空气与废物管理协会杂志》(issn:1096-2247)上的文章“估计室内颗粒的再悬浮率和停留时间”提供了有关人类活动在住宅中引起的颗粒再悬浮的影响的报告。
技术实现要素:
[0010]
本发明由权利要求书限定。
[0011]
根据本发明的一方面的示例,提供了一种空气质量控制系统,包括:
[0012]
空气处理单元,用于控制室内空间中的湿度水平;以及
[0013]
控制器,用于控制空气处理单元,其中控制器包括:
[0014]
第一输入,用于接收与在室内空间内的地面类型有关的地面类型指示;以及
[0015]
第二输入,用于接收与占用人活动或设备活动有关的活动信息,该占用人活动或设备活动发生在室内空间内的地面区域上,
[0016]
其中控制器适于根据活动信息和地面类型指示来控制湿度水平,从而减少由占用人活动或者设备活动引起的灰尘再悬浮的量。
[0017]
该系统用于控制室内环境,特别是湿度水平,以减少灰尘再悬浮的影响。本发明基于这样的认识:不同的地面类型(例如,硬的木质地面相对于软的地毯地面)以及不同的活动(例如,在该地面区域走动、真空清洁、打开门或者窗而在整个地面上产生通风)会导致不同水平的灰尘再悬浮,并且可以通过控制室内空间中的相对湿度来控制灰尘再悬浮。因此,通过监测活动和地面类型,可以在需要时实施湿度控制来减少再悬浮的灰尘的量,从而维护期望的空气质量。
[0018]
地面类型指示可以包括至少硬地面或者软地面指示。硬地面和软地面在沉降灰尘方面具有不同行为。硬地面例如可以包括木材、瓷砖、层压板、软木、pvc。附加地,地面类型指示可以区分不同的硬地面类型和/或不同的软地面类型。
[0019]
控制器例如适于生成在室内空间的不同地面区域中的地面类型的地图。该地图继而可以用于预测在不同地面区域发生的不同活动对空气质量的影响。例如,在了解厨房、大厅、休息室等的地面类型的情况下,可以预测不同的家庭活动(诸如进出房屋、烹饪、清洁或者在休息室放松)对空气质量的影响。也可以假设某些区域更容易聚集灰尘,诸如前门和后门附近。这也可以被包含在地图中。
[0020]
控制器可以包括第三输入,用于接收用户行为信息。该信息使得能够创建用户行为模型,该模型可以与地面类型的地图组合,使得可以评估用户行为对空气质量的影响。用户行为可以包括宠物行为。
[0021]
控制器可以适于基于用户行为信息来预测未来的占用人活动。因此,可以创建地面使用简档,该地面使用简档可以用于预测未来的地面使用行为。
[0022]
控制器可以适于进一步根据空气质量目标和/或舒适水平目标来控制湿度水平。因此,可以设置期望的空气质量目标和/或期望的舒适水平目标,并且湿度控制可以继而旨在实现期望的目标。可以多于这两个目标,并且不同的用户可以例如针对不同的目标具有不同的优先考虑水平。
[0023]
该系统可以进一步包括:
[0024]
活动传感器,用于向控制器提供活动信息;以及
[0025]
地面传感器,用于向控制器提供地面类型指示。
[0026]
系统可以从远程外部传感器或者输入接收传感器信息。然而,在该示例中,系统可以包括所需的传感器。
[0027]
通过示例,地面传感器可以包括声学传感器或图像传感器。这些传感器类型可以用于检测回声,作为确定地面类型的一种方式。对于相同的活动以及因此相同的声源(例如,走动或马达的声音),可以使用不同的声学剖面来区分不同的地面类型。声学分析或其他传感器输入(诸如近距离传感器)也可以用于检测位置,使得将检测到的地面类型与室内空间内的特定区域相关联。
[0028]
因此,系统可以进一步包括位置传感器,该位置传感器与地面传感器相关联和/或与地面传感器分离。
[0029]
系统可以包括机器人真空吸尘器,其中地面传感器和位置传感器被集成到机器人真空吸尘器中。因此,机器人真空吸尘器用于收集所需的地面类型信息以及关于那些地面
类型的位置信息。作为最低限度,正在被监测的活动是真空清洁本身的行动(即设备活动),并且在这种情况下,机器人真空吸尘器也可以包含活动传感器。然而,也优选地监测其他活动,诸如占用人活动(例如,他们位于何处以及他们正在做什么)。
[0030]
本发明也提供一种空气质量控制方法,包括:
[0031]
接收在室内空间内的地面类型的地面类型指示;
[0032]
接收与占用人活动或者设备活动有关的活动信息,该占用人活动或者设备活动发生在室内空间内的地面区域上;以及
[0033]
根据活动信息和地面类型指示控制湿度水平,从而减少由占用人活动或者设备活动引起的灰尘再悬浮的量。
[0034]
地面类型指示可以包括至少硬地面或者软地面指示,并且该方法包括生成在室内空间的不同地面区域中的地面类型的地图。
[0035]
该方法可以包括基于用户行为信息预测未来的占用人活动。地面类型指示和活动信息可以从机器人真空吸尘器接收。
[0036]
本发明可以至少部分地在软件中实施。
[0037]
通过参考下文描述的实施例,本发明的这些和其他方面将变得显而易见并且得以阐明。
附图说明
[0038]
为了更好地理解本发明,并且为了更清楚地示出本发明是如何实现的,现将仅以示例的方式参考附图,其中:
[0039]
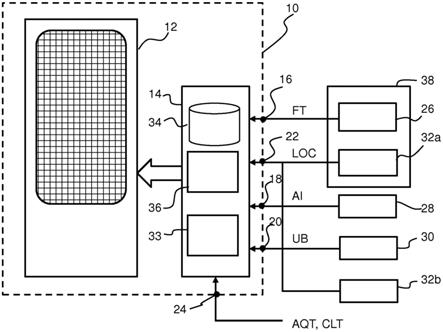
图1示出了空气质量控制系统;
[0040]
图2示出了空气质量控制方法;以及
[0041]
图3示出了适合用于实施图1的系统的控制器的计算机架构。
具体实施方式
[0042]
将参考附图描述本发明。
[0043]
应该理解的是,详细的描述和具体的示例尽管指示了装置、系统和方法的示例性实施例,但是仅旨在用于说明的目的,并且不是旨在限制本发明的范围。从以下描述、所附权利要求书和附图中,本发明的装置、系统和方法的这些和其它特征、方面和优点将变得更好理解。应当理解的是,附图只是示意性的,并且不是按比例绘制的。也应该理解的是,在所有附图中使用相同的附图标记来指示相同或相似的部分。
[0044]
本发明提供一种空气质量控制系统,在该空气质量控制系统中控制湿度水平以便减少由室内空间中的占用人活动或者设备活动引起的灰尘再悬浮的量,并且考虑到在该空间中地面表面的类型。
[0045]
图1示出了空气质量控制系统10,包括用于控制在室内空间中的湿度水平的空气处理单元12。空气处理单元12是加湿器和/或除湿器,并且可选地也是空气净化器。
[0046]
控制器14用于控制空气处理单元。
[0047]
控制器14包括第一输入16,用于接收与室内空间内地面类型有关的地面类型指示(ft)。地面类型指示可以包括至少硬地面指示或者软地面指示。硬地面和软地面在沉降灰
尘方面具有不同的行为。然而,可以有两种以上的地面类型。可以基于地面对声音的影响的分析来确定地面类型,声音由空气处理设备内的麦克风拾音,或者例如在机器人真空吸尘器中由分离的地面类型传感器拾音。也可以使用机器人吸尘器的车轮遇到的摩擦力的测量值。备选地,地面类型信息可以由用户通过用户界面输入,从而向控制器提供室内空间的空间模型。确定地面类型的另一种方式是通过视觉识别,例如使用用户的相机,或者使用住宅中的相机。
[0048]
第二输入18是用于接收与占用人活动或者设备活动有关的活动信息(ai),该占用人活动或者设备活动发生在室内空间内的地面区域上。这些活动可以包括占用人或宠物在特定地面区域周围走动、与狗玩耍、在儿童游戏区域中的游戏活动或者操作诸如自动吸尘器等设备。可以使用已知的传感器来检测活动,包括占用传感器和声音传感器,并且由用户使用的电器可将其活动状态作为第二输入的一部分来中继-例如电视被打开、微波炉正被使用、橱柜门或者冰箱门打开等。用户甚至可以具有提供手动输入来指示他们即将进行的活动的选择。
[0049]
活动信息也可以包括宠物行为。通过示例,狗和猫可能有最喜欢的躺下或者睡觉的地点,并且这可以通过检测(或者输入)宠物床的位置,或者通过检测宠物的移动模式来确定。
[0050]
第三输入20用于接收用户行为信息(ub)。该用户行为例如跟踪用户活动,诸如他们何时烹饪、用餐、在休息室放松、上班、下班回家、上床睡觉等。所有这些行为信息可以用于生成行为简档,该行为简档继而可以用来预测未来的行为事件。这些事件例如一起可以形成关于特定室内空间的地面使用简档。相似的传感器可以用于确定行为简档,如同用于检测活动一样。
[0051]
第四输入22用于接收用户(或设备)位置信息(loc)。该位置信息使得地面类型标识和活动信息能够与室内空间的特定的区域相关联。当人和家畜在房屋内从一个房间走到另一个房间时,可以使用无线信号强度、相机、行走和讲话的声音检测等来实现对其位置的跟踪。也可以确定人(或者宠物)在一个区域内的活动情况,并且位置信息可以被用于确定走动的速度或者活动的强度。
[0052]
以这种方式,可以首先生成室内空间的不同地面区域中的地面类型的地图。该地图继而可以用于预测在哪些不同地面区域发生的不同活动对空气质量的影响,正如用户行为信息所预测或者测量的那样。例如,在了解厨房、大厅、休息室等的地面类型的情况下,可以预测不同的家庭活动(诸如进出房屋、烹饪、清洁或者在休息室放松)对空气质量的影响。地面类型的地图可以附加地包括关于诸如沙发、座椅和植物等表面的信息,这些表面会收集灰尘,这些灰尘归因于活动(人或者宠物)或者气流而被释放。地图绘制也可以包括空间的体积地图绘制,因为这也对灰尘行为有影响。
[0053]
第五输入24用于接收空气质量目标(aqt)和/或舒适水平目标(clt)。这些目标可以被用于对室内空间的空气质量设置期望的控制效果。关于这些目标,不同的用户可以有不同的要求,并且在不能全部实现多个目标的情况下,不同的用户可以有不同的优先考虑。例如,有过敏症的用户可以优先考虑空气质量,而另一个用户可以优先考虑舒适水平。针对不同的情况,可以有多个简档。例如,当有过敏症的人走进房间时,可以使用更强烈的空气净化设置(具有较高的噪音水平),以支持该用户。
[0054]
从地面传感器26接收地面类型指示ft,从活动传感器28接收活动信息ai,并且从行为传感器30接收用户行为信息ub。图1示出了两个可能的位置传感器;第一位置传感器32a用于识别不同地面类型的位置,并且第二位置传感器32b用于跟踪用户的位置。系统可以包括机器人真空吸尘器38,并且如图1所示,地面传感器26和第一位置传感器32a(确定真空吸尘器的位置)被集成到机器人真空吸尘器38中。因此,机器人真空吸尘器可以用于收集所需的地面类型信息以及关于这些地面类型的位置信息。第二位置传感器32b可以用于检测占用人位置。空气质量目标aqt和/或舒适水平目标clt被接收为用户输入。这些目标之间的平衡也可以由用户输入为一组优先考虑水平。
[0055]
控制器14包括地面使用算法33、数据库34和湿度控制算法36。控制器可以是空气处理单元的一部分,但是也可以反而作为分离设备(诸如智能手机、平板电脑或笔记本电脑)上提供的软件来实施。
[0056]
系统被用于控制室内空间中的湿度水平,以减少灰尘再悬浮的影响。不同的地面类型(例如,硬的木质地面相对于软的地毯地面)以及不同的活动(例如,在该地面区域走动、真空清洁)会导致不同水平的灰尘再悬浮。通过示例,如果有可能干扰在硬地面上的灰尘的活动,就期望有相对高的湿度,而如果有可能干扰在地毯地面上的灰尘的活动,就期望有相对低的湿度。
[0057]
因此,作为最低限度,通过监测所发生的活动和相应的地面类型,可以在需要时实施湿度控制,以减少再悬浮的灰尘的量,从而保持期望的空气质量,并且可选地也将舒适水平保持在可接受的水平内。
[0058]
地面使用算法33以在不同地面类型上发生的活动的比例来计算房间中的活动,从而创建地面使用简档。地面使用简档可以是随时间的平均数,或者地面使用简档可以基于考虑到室内空间内的多个移动实体的瞬时测量值。地面使用简档可以包括多个延伸到未来的数据点作为预测。
[0059]
例如,已知用户在移动到地毯区域之前在硬地面上通常花费20分钟烹饪。备选地,自主真空吸尘器可以始终遵循预设路径。对地面使用简档有影响的其他活动的示例包括清洁活动,如手动吸尘、带有对流羽流的房屋清洁、空调系统的操作或者加热和风扇的使用等。
[0060]
也可以考虑温度针对灰尘释放的倾向的影响。
[0061]
地面使用简档甚至可以延伸到门或窗的开口,这使得能够风从房屋中吹过特定地面区域。通过打开门或窗与更高的室外气压相组合,可以在房屋中产生有影响的通风。这些室内空气流因此也可以被认为是由于特定用户行为造成的。
[0062]
因此,与门窗设置(打开/关闭)传感器相组合,行为传感器30可以包括室外风速和方向传感器以及空气压力传感器,。门和窗的打开以及气压差可以例如通过无线连接的(物联网)传感器来检测。传感器附加地能够检测“坐下-起立”事件或者确定在房屋中走动的速度。
[0063]
数据库34例如存储用户的空气质量和/或舒适水平目标,并且也可选地存储用户选择的优先权重,以用于空气处理设备的控制。
[0064]
湿度控制算法36确定要对湿度设置进行的调整或者调整协议。这些可以包括单个设置或者具有实施时间的湿度设置的时间序列。
[0065]
图2示出了一种空气质量控制方法。
[0066]
在步骤50中,接收室内空间内地面类型的地面类型指示。这使得能够生成地面类型的地图。这可以经由真空吸尘器机器人38来收集,该机器人在底部具有用作地面类型传感器的相机,或者可以与房屋地图组合手动输入信息。例如,这可以包括在不同区域中硬地面与软地面的比率的指示。如上所述,除了地面类型指示之外,还可以使用空间体积和活动表面(沙发、狗窝、植物叶子等)的数量的指示。
[0067]
在步骤52中,接收与占用人活动或者设备活动有关的信息,该占用人活动或设备活动发生在室内空间内的地面区域上。
[0068]
该活动信息使得能够确定地面使用简档。这例如包含将用户与不同地面类型的互动所造成的已知声学特征关联起来。这些声学特征被存储在数据库34中。已知的声学特征可以由在不同的已知的地面类型上走动的影响所引起的频率范围组成。
[0069]
通过分析在房间内的运动造成的声学剖面,可以从诸如步阶或马达噪音等声学线索中识别出不同的活动,例如走动或者自主设备移动(无论地面类型如何)。对于给定的检测到的活动,根据地面类型检测到同一活动的不同的声学剖面,使得可以继而确定地面类型。
[0070]
因此,为了将检测到的活动链接到特定地面类型,可以使用检测到该活动的位置来访问地面类型地图,并且从而确定地面类型,和/或活动检测本身可以使得能够对地面类型的确定。可以通过自主设备检测在不同地面类型上所花费的时间的比例。
[0071]
活动信息甚至可以用于自动生成地面类型地图。这例如可以包含检测走动声音,使用麦克风阵列(例如在空气处理设备上提供)或在对话辅助设备(诸如google home
tm
)中检测方向,以及通过分析相对声音振幅和/或混响来检测距离。这使得能够确定位置。例如使用频谱分析基于声学特征继而可以确定地面类型。继而可以生成与麦克风阵列相关的地面类型地图。
[0072]
在步骤54中,根据活动信息和地面类型指示来控制湿度水平,从而减少由占用人活动或者设备活动引起的灰尘再悬浮的量。考虑到用户对空气质量和/或舒适度的目标水平,湿度水平被附加控制。
[0073]
湿度水平由湿度控制算法36得出的湿度设置控制。
[0074]
通过示例,算法36基于地面类型图和地面使用简档来确定可能的湿度设置实现期望的目标空气质量(aqt)和/或舒适水平目标的能力。查询表可以用于评估不同的湿度设置的影响。因此,可以有由用户设定的目标大气,该目标大气是空气质量和舒适度之间的组合或者折衷。
[0075]
例如,基于指示活动仅仅发生在地毯地面上的地面使用简档,高湿度设置可以被赋予负的空气质量效益(benefit)但为正的舒适度效益。在实践中,可能的湿度设置的范围将受限于空气处理设备的能力及其相对于被处理的室内区域的位置。因此,基于预定义的和用户依赖的优先权重,可以使用效益优化函数来确定具有最大总体效益的空气处理设备湿度设置。
[0076]
可以对地面使用简档中的多个时间点执行分析,以确定未来在某些时间点的湿度设置。湿度设置影响房间实际状况所用时间的预定估计值可以用于计算湿度设置应该被实施的时间。
[0077]
可以测量其他因素(诸如用户存在)来确定湿度设置。例如,如果用户存在,则低空气质量可以具有高成本价值,并且如果用户不存在,则低空气质量具有低成本价值。
[0078]
地面使用算法33可以区分不同的个人或者房间占用人的类型(诸如婴儿或者宠物)。湿度控制算法36继而可以将成本或者效益价值分配给针对已检测到的特定用户或占用人类型的湿度设置。
[0079]
在多个房间占用人的情况下,不同的房间占用人可能具有对应于不同的最优湿度设置的目标水平。在这种情况下,优先算法可以在使用哪个最优之间进行仲裁。例如,如果检测到在硬地面上的婴儿,则可以选择高湿度设置,因为他们的活动对其吸入的灰尘水平有更大的影响(他们更活跃并且离地面更近),并且他们的健康可能更受关注。
[0080]
在一些示例中,重要的再悬浮可能发生在非地面的表面(诸如家具或者墙壁),地面使用算法可以包括区分更多类型的表面互动的能力。
[0081]
在不同的设备被分派给不同的区域的情况下,建筑物可以具有多个空气处理设备。这些设备可以相互通信以协调湿度控制。
[0082]
空气处理设备可以包括空气净化/过滤功能。可以期望(在没有占用人的情况下)故意引起灰尘再悬浮,使得在灰尘重新沉降之前可以进行过滤。因此,可以故意使用控制器来增加再悬浮,与加大空气净化功能相组合,作为执行对区域的清洁的方式。当确定增加的再悬浮不会对占用人产生负面影响时,这一点是有意义的,因为这将增加空间的总体清洁度。
[0083]
上文描述的系统利用控制器来处理数据。
[0084]
图3示出了用于实施上述控制器或者处理器的计算机60的示例。
[0085]
计算机60包括但不限于pc、工作站、笔记本电脑、pda、掌上设备、服务器、存储器等。通常,在硬件架构方面,计算机60可以包括一个或多个处理器61、存储器62以及一个或多个i/o设备63,这些设备经由本地接口(未示出)通信地耦接。如本领域中已知的,本地接口可以是例如但不限于一个或多个总线或者其他有线或无线连接。本地接口可以具有附加的元件,诸如控制器、缓冲器(缓存)、驱动器、中继器和接收器,以使能通信。进一步,本地接口可以包括地址、控制和/或数据连接,以使得能够在上述组件之间进行适当的通信。
[0086]
处理器61是用于执行软件的硬件设备,该软件可以存储在存储器62中。处理器61几乎可以是任何定制的或者市售的处理器、中央处理单元(cpu)、数字信号处理器(dsp)或者与计算机60相关联的几个处理器中的辅助处理器,并且处理器61可以是基于半导体的微处理器(以微芯片的形式)或者微处理器。
[0087]
存储器62可以包括易失性存储器元件(例如,随机存取存储器(ram),诸如动态随机存取存储器(dram)、静态随机存取存储器(sram)等)和非易失性存储器元件(例如rom、可擦除可编程只读存储器(eprom)、电子可擦除可编程只读存储器(eeprom)、可编程只读存储器(prom)、磁带、光盘只读存储器(cd-rom)、磁盘、软盘、磁带盒、卡带等等)中的任意一种或组合。此外,存储器62可以包含电子、磁性、光学和/或其他类型的存储介质。需要注意的是,存储器62可以具有分布式的架构,其中各种组件彼此远程放置,但可以由处理器61访问。
[0088]
存储器62中的软件可以包括一个或多个分离的程序,这些一个或多个分离的程序中的每个程序包括用于实施逻辑功能的可执行指令的有序列表。根据示例性实施例,存储器62中的软件包括合适的操作系统(o/s)64、编译器65、源代码66和一个或多个应用67。
[0089]
应用67包括许多功能组件,诸如计算单元、逻辑、功能单元、过程、操作、虚拟实体和/或模块。
[0090]
操作系统64控制计算机程序的执行,并且提供调度、输入-输出控制、文件和数据管理、存储器管理以及通信控制和相关服务。
[0091]
应用67可以是源程序、可执行程序(对象代码)、脚本或者包括一组待执行指令的任何其它实体。当是源程序时,那么程序通常经由编译器(诸如编译器65)、汇编器、解释器等被翻译,这些编译器、汇编器、解释器等可以包括或可以不包括在存储器62内,使得与操作系统64连接时适当地操作。而且,应用67可以被编写为面向对象的编程语言,其具有数据和方法的类,或者过程编程语言,其具有例程、子例程和/或函数,例如但不限于c、c++、c#、pascal、basic、api调用、html、xhtml、xml、asp脚本、javascript、fortran、cobol、perl、java、ada、.net等。
[0092]
i/o设备63可以包括输入设备(诸如,例如但不限于鼠标、键盘、扫描仪、麦克风、相机等)。而且,i/o设备63也可以包括输出设备,例如但不限于打印机、显示部等。最后,i/o设备63进一步可以包括将输入和输出两者通信的设备,例如但不限于网络接口控制器(nic)或者调制器/解调器(用于访问远程设备、其他文件、设备、系统或者网络)、射频(rf)或者其他收发器、电话接口、网桥、路由器等。i/o设备63也包括用于通过各种网络(诸如互联网或者内联网)通信的组件。
[0093]
当计算机60处于操作中时,处理器61被配置为执行存储在存储器62内的软件,以向存储器62通信数据和从存储器62通信数据,并且根据软件总体上控制计算机60的操作。应用67和操作系统64由处理器61全部或者部分地读取,也许被缓冲在处理器61内,继而被执行。
[0094]
当应用67以软件被实施时,应当注意的是,应用67可以被存储在几乎任何计算机可读介质上,供任何计算机相关系统或方法使用或者与之相连接。在本文件的上下文中,计算机可读介质可以是电子、磁性、光学或者其他物理设备或装置,该设备或装置可以包含或存储计算机程序以供计算机相关系统或方法使用还或者与之相连接。
[0095]
通过研究附图、公开内容和所附权利要求,本领域技术人员在实践所要求保护的发明时可以理解和实现所公开的实施例的其他变化。在权利要求中,词语“包括”不排除其他元件或步骤,并且不定冠词“一”或“一个”不排除多个。在互不相同的从属权利要求中记载某些措施的事实并不指示不能有利地使用这些措施的组合。权利要求中的任何附图标记都不应该被解释为限制范围。
[0096]
在存在多种地面类型的空间内发生灰尘再悬浮活动的情况下,本发明的使用特别有益。当房间占用人从事可预测的行为模式,在转换到另一地面类型前在一定时间长度内占有一种地面类型,该系统可能最有效。
[0097]
通过研究附图、公开内容和所附权利要求,本领域技术人员在实践所要求保护的发明时可以理解和实现所公开的实施例的变化。在权利要求中,单词“包括”不排除其他元件或步骤,并且不定冠词“一”或“一个”不排除多个。单个处理器或其他单元可以实现权利要求中记载的若干项的功能。在互不相同的从属权利要求中记载某些措施的事实并不意味着不能有利地使用这些措施的组合。计算机程序可以被存储/分布在合适的介质上,诸如与其他硬件一起提供或作为其一部分提供的光学存储介质或者固态介质,但是也可以以其他
形式分布,诸如经由互联网或者其他有线或无线电信系统。权利要求中的任何附图标记都不应该被解释为限制范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1