自动导航式火灾烟气洗消机器人的制作方法
1.本实用新型涉及火灾消防领域,尤其涉及一种自动导航式火灾烟气洗消机器人。
背景技术:
2.火灾中人员致死主要因素是有毒烟气与高温热气。目前国内外狭长空间火灾烟气防控技术主要采用固定式机械排烟技术,局部配备移动消防设备,喷射大量水或者水雾等来达到降温降烟的效果。此类技术存在的不足有:烟气温度达到一定时无法排烟,会破坏火场烟气层,降低火场能见度等。
3.公布号为cn111013063a的专利文献公开了一种履带式消防机器人,包括调节座、过滤箱、吸风机、连接管、吸烟管,调节座的顶部转动连接有吸烟管,吸风机的输出端延伸至过滤箱内,吸风机的输入端密封固定连接有连接管,连接管的一端与吸烟管密封固定连接。该消防机器人无法在火灾发生时快速启动,难以及时保障救援与疏散安全通道,并提高人员疏散时间。
技术实现要素:
4.本实用新型所要解决的技术问题在于提供一种能够在火灾发生时快速启动的自动导航式火灾烟气洗消机器人。
5.本实用新型是通过以下技术手段实现解决上述技术问题的:自动导航式火灾烟气洗消机器人,包括动力行走系统、烟气洗消系统、烟气抽吸系统、控制系统;所述烟气洗消系统安装在所述动力行走系统上,所述烟气抽吸系统安装在所述烟气洗消系统上并连通所述烟气洗消系统,所述动力行走系统、烟气洗消系统、烟气抽吸系统分别连接所述控制系统;所述控制系统设有信息处理模块、路径规划模块、红外摄像头识别模块和烟气浓度温度传感器模块。动力行走系统配合火源识别和路径规划实现自动导航模式,能够对火灾中的烟尘进行洗涤、消净,火灾发生时可快速启动,及时保障救援与疏散安全通道,并提高人员疏散时间。
6.作为优化的技术方案,所述动力行走系统采用履带式动力行走系统。针对狭长地下空间,通过小型化移动式装备搭载烟气洗消系统,可广泛用于地铁、地下停车场、公路隧道等狭长空间。
7.作为优化的技术方案,所述烟气洗消系统包括抽风装置、过滤装置和冷却装置。能够对火灾烟尘进行过滤和冷却。
8.作为优化的技术方案,所述烟气抽吸系统采用可旋转烟气覆盖式抽吸机械臂,能够旋转使得进烟口朝上或者朝下。
9.本实用新型的优点在于:
10.1、具有自动导航模式,能够对火灾中的烟尘进行洗涤、消净,火灾发生时可快速启动,及时保障救援与疏散安全通道,并提高人员疏散时间。
11.2、针对狭长地下空间,通过小型化移动式装备搭载烟气洗消系统,可广泛用于地
铁、地下停车场、公路隧道等狭长空间。
附图说明
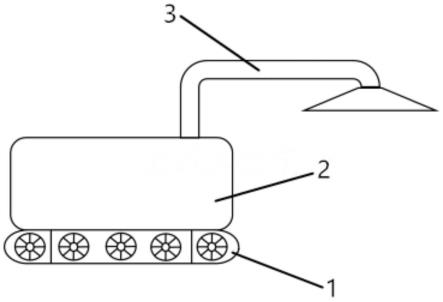
12.图1是本发明实施例自动导航式火灾烟气洗消机器人的烟气抽吸系统进烟口朝下状态的示意图。
13.图2是本发明实施例自动导航式火灾烟气洗消机器人的烟气抽吸系统进烟口朝上状态的示意图。
14.图3是本发明实施例自动导航式火灾烟气洗消机器人的工作流程图。
具体实施方式
15.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.如图1至图3所示,自动导航式火灾烟气洗消机器人,包括动力行走系统1、烟气洗消系统2、烟气抽吸系统3、控制系统。
17.如图1、图2所示,烟气洗消系统2安装在动力行走系统1上,烟气抽吸系统3安装在烟气洗消系统2上并连通烟气洗消系统2,动力行走系统1、烟气洗消系统2、烟气抽吸系统3分别连接所述控制系统;动力行走系统2采用履带式动力行走系统,针对狭长地下空间,通过小型化移动式装备搭载烟气洗消系统2,也可与现有的固定式烟气洗消系统组合;烟气洗消系统2采用固定式烟气洗消系统,包括抽风装置、过滤装置和冷却装置,烟气洗消系统2可采用基于多种物化分离融合技术的烟气洗消装置;烟气抽吸系统3采用可旋转烟气覆盖式抽吸机械臂,能够旋转使得进烟口朝上或者朝下。
18.如图3所示,所述控制系统具有自动导航模式,设有信息处理模块、路径规划模块、红外摄像头识别模块和烟气浓度温度传感器模块。
19.本实用新型自动导航式火灾烟气洗消机器人的工作原理为:在地下狭长空间内部某处发生火灾发生初期,信息处理模块接收外部火灾报警信息,定位到火灾发生地点,路径规划模块执行导航及路径规划算法得到行走路线;所述自动导航式火灾烟气洗消机器人抵达火灾发生地点后,通过红外摄像头识别模块定位火源空间位置;然后开启烟气洗消系统2和烟气抽吸系统3进行烟气洗消,同时开启烟气浓度温度传感器模块进行抽吸位置的烟气浓度和温度监测;烟气抽吸系统3初始状态进烟口朝下,在火源上方距离火源0.5m处以覆盖烟气洗消式进行连续的烟气抽吸和过滤冷却;当烟气浓度和温度的监测值小于改变洗消方式步骤对应的设定阈值后,烟气抽吸系统3旋转使得进烟口朝上,在火源上方距离地面1.9m处以顶棚吸收烟气洗消式进行连续的烟气抽吸和过滤冷却;当烟气浓度和温度的监测值小于关闭步骤对应的设定阈值后,关闭烟气洗消系统2和烟气抽吸系统3,所述自动导航式火灾烟气洗消机器人沿原路线自动导航返回至存放处。
20.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前
述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
技术特征:
1.一种自动导航式火灾烟气洗消机器人,其特征在于:包括动力行走系统、烟气洗消系统、烟气抽吸系统、控制系统;所述烟气洗消系统安装在所述动力行走系统上,所述烟气抽吸系统安装在所述烟气洗消系统上并连通所述烟气洗消系统,所述动力行走系统、烟气洗消系统、烟气抽吸系统分别连接所述控制系统;所述控制系统设有信息处理模块、路径规划模块、红外摄像头识别模块和烟气浓度温度传感器模块。2.如权利要求1所述的自动导航式火灾烟气洗消机器人,其特征在于:所述动力行走系统采用履带式动力行走系统。3.如权利要求1所述的自动导航式火灾烟气洗消机器人,其特征在于:所述烟气洗消系统包括抽风装置、过滤装置和冷却装置。4.如权利要求1所述的自动导航式火灾烟气洗消机器人,其特征在于:所述烟气抽吸系统采用可旋转烟气覆盖式抽吸机械臂,能够旋转使得进烟口朝上或者朝下。
技术总结
本实用新型公开了一种自动导航式火灾烟气洗消机器人,涉及火灾消防领域,包括动力行走系统、烟气洗消系统、烟气抽吸系统、控制系统;所述烟气洗消系统安装在所述动力行走系统上,所述烟气抽吸系统安装在所述烟气洗消系统上并连通所述烟气洗消系统,所述动力行走系统、烟气洗消系统、烟气抽吸系统分别连接所述控制系统;所述控制系统设有信息处理模块、路径规划模块、红外摄像头识别模块和烟气浓度温度传感器模块。本实用新型的优点在于:能够对火灾中的烟尘进行洗涤、消净,火灾发生时可快速启动,及时保障救援与疏散安全通道,并提高人员疏散时间。人员疏散时间。人员疏散时间。
技术研发人员:周帆 周扬 何东 张飞 杨广
受保护的技术使用者:合肥科大立安安全技术有限责任公司
技术研发日:2021.11.16
技术公布日:2022/6/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1