一种追踪型自调太阳能集热器
1.本发明涉及太阳能利用技术领域,具体涉及一种追踪型自调太阳能集热器。
背景技术:
2.太阳能是一种清洁能源,对于太阳能的利用已非常广泛,平板式太阳能集热器是其中之一。由于不同的地区、不同的时间,太阳光照射角不同,而太阳直射时对太阳光的利用率最高。现有的平板式太阳能集热器几乎都为固定式,这使得该类集热器无法充分利用不断变化角度的太阳光,从而导致集热器的日均太阳能利用率较低。
技术实现要素:
3.本发明意在提供一种追踪型自调太阳能集热器,解决现有的平板式太阳能集热器的日均太阳能利用率较低的技术问题。
4.为实现上述目的,本发明所采用的的技术方案是:
5.一种光线追踪太阳能集热器,包括相互连接的太阳能集热板和光线追踪机构;
6.所述光线追踪机构包括了光线追踪装置、驱动机构和控制模块;
7.所述光线追踪装置设置在太阳能集热板接受太阳光一面的中心处,包括多个沿着所述太阳能集热板俯仰和水平转动的方向排布的光线追踪模块,其中一光线追踪模块位于太阳能集热板的中心处,各光线追踪模块能感知照射其上的光线强度;
8.所述控制模块用于依照各光线追踪模块感知到的光线强度,发出让太阳能集热板向感知到的光线强度更大的光线追踪模块所在的方向水平或俯仰转动的指令,直至位于太阳能集热板的中心处光线追踪模块感知到的光线强度大于其他所有光线追踪模块;
9.所述驱动机构与太阳能集热板连接,用于依照控制模块的指令驱动太阳能集热板水平和俯仰转动。
10.进一步的,所述光线追踪装置由两个半圆柱形状的基座正交而成,光线追踪模块在平面上呈十字形地沿着两个半基座的外轮廓均匀设置。
11.进一步的,以两个半圆柱的交点为0度,交点处设置一光线追踪模块,两个半圆柱上各自沿着圆弧两侧30度、60度处各设置两个相同的光线追踪模块。
12.进一步的,所述光线追踪模块呈盒状,上侧为滤光板,下侧设置光敏电阻用以感知光线强度。
13.进一步的,光线追踪装置内嵌在太阳能集热板里,上方由与太阳能集热板表面齐平的玻璃密封。
14.进一步的,所述阳能集热板的表面上设置有自清洁装置,该自清洁装置包括自清洁装置导轨、驱动轮和毛刷;
15.自清洁装置导轨和驱动轮成对设置在太阳能集热板相对的两条侧边上,驱动轮在外接驱动装置的驱动下,能沿着自清洁装置导轨往复运动;毛刷成条状,位于太阳能集热板两侧的动驱轮之间,能随驱动轮一起运动,且与太阳能集热板表面接触。
16.进一步的,所述控制模块还用于按照以下策略控制驱动机构和自清洁装置:
17.情况1.光敏电阻阻值在水平或俯仰方向上出现两个及以上的极大值;
18.情况2.光敏电阻的极小值点位于中心部位的光敏电阻时,四周的光敏电阻阻值大小差异大于30%;
19.情况3.循环调整角度完毕后,光敏电阻极小值点出现在最外侧的四个光敏电阻中的一个;
20.当出现以上情况时,启动自清洁装置对太阳能集热板表面进行清洁,且太阳能集热板回到水平位置,并重新开始进行太阳光线追踪。
21.进一步的,在以上三种情况出后,可根据情况的不同实施三种不同的光线追踪补偿方法:
22.情况1出现时,先进行俯仰角度调节,使太阳能集热板处于竖直的姿态,以此为开始,在俯仰方向上旋转太阳能集热板180度,以中心部位的光敏电阻为参考,记录光敏电阻的阻值,记录完毕后,将太阳能集热板调整至使中心光敏电阻最小的位置,然后按照同样的方法进行水平角度的调节,在调节过程中,俯仰角度维持不变;
23.情况2出现时,同情况1;
24.情况3出现时,按照对应阻值最小的的光敏电阻偏离中心光敏电阻的方位及角度,将太阳能集热板向其方位转动相应的角度。
25.进一步的,自清洁时间移至为夜间。
26.进一步的,在清洁的过程中,太阳能集热板将会首先被置于水平姿态,然后毛刷进行一个来回的清理,然后处于竖直状态,进行第二个来回的清洗。
27.本发明的有益效果是:本发明利用多个光线追踪模块感知到光线强度间的差距来定位光线最强的方向,并利用驱动机构驱动太阳能集热板转向该昂想,进而使得太阳能集热器可以进行光线追踪,提高太阳能集热器的能源利用率和运行效率。
28.在本发明的另外一些是实施例中,考虑到太光线追踪模块使用过程中可能会出现的因为鸟屎、尘埃等污物而造成的追踪错误的情况,进入了自清洁装置以及设定了检测是否出现污物造成追踪错误的策略,进而可以及时的或根据人为设定的时段启动自清洁装置,去除污物,并可利用光线追踪补偿方法及时纠正追踪错误,亦或是在不影响太阳能集热板收集能量的夜间进行清理,提高太阳能使用率降低。
附图说明
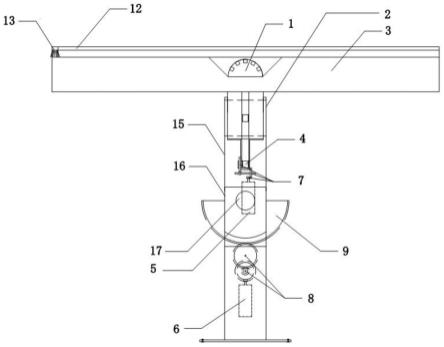
29.图1为本发明实施例中的追踪型自调太阳能集热器的主视图;
30.图2为图1中的追踪型自调太阳能集热器的左视图。
31.图3为本发明实施例中的光线追踪装置的结构示意图,其中(a)部分为左视图及其局部放大图,(b)部分为右视图,(c)部分为右视图。
32.图4为本发明实施例中的追踪型自调太阳能集热器进行光线追踪的工作流程示意图。
33.说明书附图中的附图标记包括:1-光线追踪装置;2-水平转轴;3-太阳能集热板;4-平衡杆;5-水平电机;6-俯仰电机;7-水平传动齿轮组;8-俯仰传动齿轮组;9-半圆型调节齿轮;10-滤光片;11-光敏电阻;12-自清洁装置导轨;13-驱动轮;14-毛刷;15-摇臂,16-固
定臂,17-俯仰转轴,18-基座。
具体实施方式
34.下面结合附图对本发明的具体实施方式作进一步说明:
35.如图1和图2所示,本实施例中的追踪型自调太阳能集热器主要包括太阳能集热板3和光线追踪机构;
36.光线追踪机构又包括了光线追踪装置1和驱动机构,其中驱动机构包括了摇臂15、固定臂16、水平转轴2、平衡杆4、水平电机5、水平传动齿轮组7、俯仰电机6、俯仰转轴17、俯仰传动齿轮组8和半圆形调节齿轮9。
37.如图2中所示,水平转轴2位于太阳能集热板3的下方,太阳能集热板3向下延伸出连接部,水平转轴2穿过连接部,且水平转轴2、连接部与下方的摇臂15形成枢转连接关系。平衡杆4用来稳定太阳能集热板以及传递动力调整太阳能集热板3的水平角度,由一根水平杆和两根竖直杆自组成,两根竖直杆匀有一端铰接在水平杆的端部,水平杆的两端各自铰接一竖直杆;两根竖直杆远离水平杆的一端又各自与其上方固定在太阳能集热板3上的连接杆铰接。摇臂15为中空结构,水平电机5以及水平传动齿轮组7位于摇臂15内,水平传动齿轮组7包括了第一水平传动齿轮、第二水平传动齿轮、第三水平传动齿轮和水平齿轮轴,第一水平传动齿轮、第二水平传动齿轮、第三水平传动齿轮均竖直设置,其中水平齿轮轴的两端分别固定在第一水平传动齿轮和第二水平传动齿轮的齿轮孔内,第三水平传动齿轮与第二水平传动齿轮啮合,且第三水平传动齿轮通过一芯轴固定连接在水平杆中点部位的侧壁上,第一水平传动齿轮为斜齿轮,水平电机5的输出轴上也同轴固定有驱动齿轮,该驱动齿轮同为斜齿轮并与第一水平传动齿轮啮合,于是水平电机5输出的转矩经由第一水平传动齿轮、水平齿轮轴、第二水平传动齿轮、第三水平传动齿轮专递到了平衡杆4的水平杆上,水平杆绕随第三传动齿轮绕芯轴的轴向转动,从而驱动太阳能集热板进行水平调节,为此摇臂15上留出了供水平杆的两端上下摆动的空间,本实施例中,该空间为开设在摇臂15上的裂缝。
38.如图1所示,固定臂16与半圆形调节齿轮9通过俯仰转轴17枢转连接,摇臂15又与半圆形调节齿轮9固定连接,枢转连接的枢转方向即为俯仰方向,正交于水平转轴2、连接部与摇臂15形成的枢转方向,即水平方向。固定臂16也是中空结构,俯仰电机6和俯仰传动齿轮组8设于其内,俯仰电机6通过俯仰传动齿轮组将动力传递到半圆形调节齿轮9从而进行摇臂15的俯仰调节,进而完成太阳能集热板的俯仰调节。
39.光线追踪装置1的结构基本如图3所示,光线追踪装置1内嵌在太阳能集热板里,上方由与太阳能集热板表面齐平的玻璃密封,其由两个半圆柱形状的基座17正交而成,半圆柱的半径为100mm,高度为25mm,包含九个光线追踪模块,光线追踪模块的构造为长宽高20mm的立方体盒子,侧面四个内表面以及下侧内表面涂黑,减少光线的反射,上侧为滤光板10,用来削减光线的亮度,下侧放置光敏电阻11用以进行光线追踪,从而使光敏电阻在工作时能有较明显的电阻差异。光线追踪模块在平面上呈十字形地沿着两个半圆形基座的外轮廓均匀设置,以两个半圆柱的交点为0度,此处设置一光线追踪模块,两个半圆柱各自沿着圆弧两侧30度、60度,各设置两个相同的光线追踪模块。本实施例中,中央部位(中央0点位置)的光敏电阻11位于太阳能集热板的法线处,同时也是两个半圆形基座的垂直昂相交之
处,并且,两个半圆形基座一个与沿水平转轴2的转动周向设置,于是该半圆形基座上的光敏电阻11沿于太阳能集热板水平调节的方向布置,另一个沿半圆形调节齿轮9的转动周向设置,于是该半圆形基座上的光敏电阻11沿于太阳能集热板俯仰调节的方向布置。
40.太阳光照射到光线追踪装置上时,九个光敏电阻11受到不同强度的光线照射,电阻值发生改变,根据最小电阻值对应的光敏电阻11,可以判断太阳光线最强的方位,通过水平调节和俯仰调节,调整太阳能集热板3的法线向电阻值最小的方向转动。调整完毕后再次对九个光敏电阻进行判断,如果中央部位的光敏电阻不是电阻最低值,则重新调整太阳能集热板的法线,以对准新的电阻最低的方位。
41.具体的,本实施例中采用如图4所示的调整过程,首先在判断光线追踪太阳能集热板中央0点位置的光敏电阻的阻值是否是最小,如果不是,则先开始水平方向的调节,将太阳能集热板向水平方向上布置的各光敏电阻中,电阻值最小的光敏电阻方向转动一个定值,本实施例中是15
°
,调整完毕后再次比较水平方向上布置的各光敏电阻的阻值,判断在水平方向上布置的各光敏电阻中,0点位置的光敏电阻的阻值是否是最小的,如果不是则再一次转动。直至水平方向上布置的各光敏电阻中最低电阻处为中央0点位置的光敏电阻时或循环调整十次后停止。紧接着是俯仰方向的调整,过程与水平方向相同。也可以先在俯仰方向上调整而后在水平方向上调整。
42.本实施例中,太阳能集热板3的表面上设置了自清洁装置,用于在太阳能追踪装置上方的透明面粘上如鸟屎或灰尘一类的污物,进而一个或多个太阳能追踪模块被遮挡的情况出现时,进行自清洁。自清洁装置包括自清洁装置导轨12、驱动轮13和毛刷14;清洁装置导轨57和驱动轮13成对设置在太阳能集热板3相对的两条侧边上,驱动轮在外接驱动装置(如电机)的驱动下,能沿着自清洁装置导轨12往复运动;毛刷14成条状,位于太阳能集热板3两侧的动驱轮58之间,能随驱动轮13一起运动,且与太阳能集热板3表面接触。
43.在调整的工程中,当出现以下情况时,可判定太阳能追踪模块出现遮挡情况:
44.情况1.光敏电阻阻值在水平或俯仰方向上出现两个及以上的极大值。
45.情况2.光敏电阻的极小值点位于中心部位的光敏电阻时,四周的光敏电阻阻值大小差异大于30%。
46.情况3.循环调整角度完毕后,光敏电阻极小值点出现在最外侧的四个光敏电阻中的一个。
47.当出现以上情况时,判断为太阳能集热板表面有污渍需要进行清理,可向用户发出提醒信息。根据用户的选择,可以选择立即进行清洗。此时自清洁装置将会启动,对太阳能集热板表面进行清洁。在清洁的过程中,太阳能集热板将会首先被置于水平姿态,然后毛刷进行一个来回的清理。然后处于竖直状态,进行第个来回的清洗。30分钟后,太阳能集热板回到水平位置,并重新开始进行太阳光线追踪。
48.根据用户的选择,也可以将自清洁时间调整为夜间,尽量减少在白天太阳能较为充足的时段进行自清洁,从而减少太阳能的浪费。
49.在以上三种情况出后,可根据情况的不同实施三种不同的光线追踪补偿方法:
50.情况1出现时,先进行俯仰角度调节,使太阳能集热板处于竖直的姿态,以此为开始,在俯仰方向上旋转太阳能集热板180度,以中心部位的光敏电阻为参考,记录光敏电阻的阻值。记录完毕后,将太阳能集热板调整至使中心光敏电阻最小的位置。然后按照同样的
方法进行水平角度的调节,在调节过程中,俯仰角度维持不变。
51.情况2出现时,同情况1。
52.情况3出现时,光敏电阻极小值点出现在了非中心的其他光敏电阻上,按照对应的光敏电阻偏离中心光敏电阻的方位及角度,将太阳能集热板向其方位转动相应的角度,作为补偿追踪方法。
53.本实施例中,利用控制模块根据各光敏电阻采集到的数据实施算法进而来控制各电机的运行,进而实现相应的动作。
54.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1