一种城市管道清淤监测一体化机器人
1.本实用新型涉及城市管道检测技术领域,具体为一种城市管道清淤监测一体化机器人。
背景技术:
2.为了加强对城市管道进行检测,工作人员常常使用巡检机器人辅助人工进行检测,在管道巡检时机器人主要利用前置摄像机和辅助光源对管道内的缺陷进行快照,同时借助搭载的粉碎钻头对管道堵塞物进行清理,然而现有的机器人存在以下缺陷:管道机器人的清淤钻头多安装在机器人下方:清淤方式以管道地面清理为主,无法对管道上部及周围的淤泥进行清理,清淤范围较局限,降低机器人的清洗效率。
技术实现要素:
3.本实用新型的目的在于提供一种城市管道清淤监测一体化机器人,以解决上述背景技术中提出的管道机器人的清淤钻头多安装在机器人下方:清淤方式以管道地面清理为主,无法对管道上部及周围的淤泥进行清理,清淤范围较局限,降低机器人的清洗效率的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种城市管道清淤监测一体化机器人,包括机器人检测平台,所述机器人检测平台顶端的一侧固定安装有勘测柱,所述勘测柱的顶端固定安装有可视化摄像头,所述机器人检测平台顶端远离勘测柱的一侧固定安装有清理台,所述清理台顶端的两侧均转动连接有智能调节机械臂,两个所述智能调节机械臂远离清理台的一端均固定安装有机械铲,所述机器人检测平台两侧的两端均转动安装有安装轴,每两个相邻所述安装轴之间均传动连接有履带,所述机器人检测平台靠近勘测柱一侧的两端均安装有绞机,所述机器人检测平台的底端固定安装有智能集成传感器,两条智能调节机械臂可根据管道型号进行大小调节,在机器人工作过程中通过两条智能调节机械臂的摆动带动机械铲进行淤泥、杂物等的清除工作,然后由绞机进行废物的清理破碎工作。
5.优选的,所述勘测柱的表面固定安装有两个智能勘测灯,两个智能勘测灯发射出红外光线,管道内壁如有破损情况可以通过智能勘测灯发射出的红外线智能勘探并及时反馈至用户终端。
6.优选的,两个所述履带的表面均开设有若干个摩擦纹路,履带上开设的摩擦纹路,使得履带适应复杂管道地形,增大履带与管道内壁的摩擦力,确保机器人运作顺利。
7.优选的,所述机器人检测平台上固定安装有位于绞机下方的收集板,绞机清理下的垃圾集中收集在收集板上,便于工作人员对清理的垃圾集中清理。
8.优选的,两个所述机械铲与两个智能调节机械臂之间均固定安装有弹性缓冲柱,弹性缓冲柱具有良好的弹性,机械铲利用弹性缓冲柱的弹性势能反复与管壁接触,增加机械铲的清淤能力。
9.优选的,两个所述机械铲均由不锈钢材料制成,因为管道内流动的水流或者残留的杂质,具有腐蚀性,不锈钢具有良好的耐腐蚀性,机械铲的耐腐性良好,便于对管道进行清理。
10.与现有技术相比,本实用新型的有益效果是:通过设置可视化摄像头和通过智能调节机械臂安装的机械铲,便于工作人员清晰的看到管道内部情况的同时,辅助工作人员进行定期专业化的清淤疏通作业,提高机器人的清洗效率。
附图说明
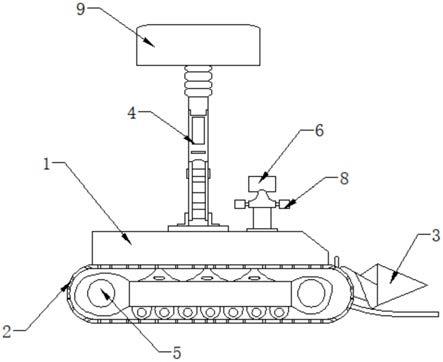
11.图1为本实用新型的侧视图;
12.图2为本实用新型的主视图;
13.图3为本实用新型的俯视图;
14.图4为本实用新型清理台上两个智能调节机械臂的安装示意图;
15.图5为本实用新型勘测柱与智能勘测灯的连接图。
16.图中:1、机器人检测平台;2、履带;3、绞机;4、智能调节机械臂;5、安装轴;6、可视化摄像头;7、智能集成传感器;8、智能勘测灯;9、机械铲;10、摩擦纹路;11、收集板;12、勘测柱;13、清理台;14、弹性缓冲柱。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
18.请参阅图1-5,本实用新型提供了一种城市管道清淤监测一体化机器人,包括机器人检测平台1,机器人检测平台1顶端的一侧固定安装有勘测柱12,勘测柱12的顶端固定安装有可视化摄像头6,机器人检测平台1顶端远离勘测柱12的一侧固定安装有清理台13,清理台13顶端的两侧均转动连接有智能调节机械臂4,两个智能调节机械臂4远离清理台13的一端均固定安装有机械铲9,机器人检测平台1两侧的两端均转动安装有安装轴5,每两个相邻安装轴5之间均传动连接有履带2,机器人检测平台1靠近勘测柱12一侧的两端均安装有绞机3,机器人检测平台1的底端固定安装有智能集成传感器7,两条智能调节机械臂4可根据管道型号进行大小调节,在机器人工作过程中通过两条智能调节机械臂4的摆动带动机械铲9进行淤泥、杂物等的清除工作,然后由绞机3进行废物的清理破碎工作。
19.勘测柱12的表面固定安装有两个智能勘测灯8,两个智能勘测灯8发射出红外光线,管道内壁如有破损情况可以通过智能勘测灯8发射出的红外线智能勘探并及时反馈至用户终端。
20.两个履带2的表面均开设有若干个摩擦纹路10,履带2上开设的摩擦纹路10,使得履带2适应复杂管道地形,增大履带2与管道内壁的摩擦力,确保机器人运作顺利。
21.机器人检测平台1上固定安装有位于绞机3下方的收集板11,绞机3清理下的垃圾集中收集在收集板11上,便于工作人员对清理的垃圾集中清理。
22.两个机械铲9与两个智能调节机械臂4之间均固定安装有弹性缓冲柱14,弹性缓冲柱14具有良好的弹性,机械铲9利用弹性缓冲柱14的弹性势能反复与管壁接触,增加机械铲9的清淤能力。
23.两个机械铲9均由不锈钢材料制成,因为管道内流动的水流或者残留的杂质,具有腐蚀性,不锈钢具有良好的耐腐蚀性,机械铲9的耐腐性良好,便于对管道进行清理。
24.本申请实施例在使用时:管道机器人可以利用360度可视化摄像头6对管道内部结构进行高清摄像,并将图片发回后台,通过数据分析判断管道是否有破损等问题,智能集成传感器7采用mems集成传感器运用5g通讯原理精准且高效地实现对机器人远程操控,避免有线连接的不稳定性,使得机器人本身具备水质检测传感器,用以判断水质是否被污染,扩宽了本管道机器人的应用场景,为了防止清淤过程中,机器人的其中一个智能勘测灯8被淤积覆盖导致无法清晰观察,我们在智能勘测灯8的后区设置了清洁装置,当前段智能勘测灯8被遮挡时,会将前区智能勘测灯8调动到后区清洗后再自动移回前段,两条智能调节机械臂4可根据管道型号进行大小调节,在机器人工作过程中通过两条智能调节机械臂4的摆动带动机械铲9进行淤泥、杂物等的清除工作,然后由绞机3进行废物的清理破碎工作。
25.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种城市管道清淤监测一体化机器人,包括机器人检测平台(1),其特征在于:所述机器人检测平台(1)顶端的一侧固定安装有勘测柱(12),所述勘测柱(12)的顶端固定安装有可视化摄像头(6),所述机器人检测平台(1)顶端远离勘测柱(12)的一侧固定安装有清理台(13),所述清理台(13)顶端的两侧均转动连接有智能调节机械臂(4),两个所述智能调节机械臂(4)远离清理台(13)的一端均固定安装有机械铲(9),所述机器人检测平台(1)两侧的两端均转动安装有安装轴(5),每两个相邻所述安装轴(5)之间均传动连接有履带(2),所述机器人检测平台(1)靠近勘测柱(12)一侧的两端均安装有绞机(3),所述机器人检测平台(1)的底端固定安装有智能集成传感器(7)。2.根据权利要求1所述的一种城市管道清淤监测一体化机器人,其特征在于:所述勘测柱(12)的表面固定安装有两个智能勘测灯(8)。3.根据权利要求1所述的一种城市管道清淤监测一体化机器人,其特征在于:两个所述履带(2)的表面均开设有若干个摩擦纹路(10)。4.根据权利要求1所述的一种城市管道清淤监测一体化机器人,其特征在于:所述机器人检测平台(1)上固定安装有位于绞机(3)下方的收集板(11)。5.根据权利要求1所述的一种城市管道清淤监测一体化机器人,其特征在于:两个所述机械铲(9)与两个智能调节机械臂(4)之间均固定安装有弹性缓冲柱(14)。6.根据权利要求1所述的一种城市管道清淤监测一体化机器人,其特征在于:两个所述机械铲(9)均由不锈钢材料制成。
技术总结
本实用新型公开了一种城市管道清淤监测一体化机器人,包括机器人检测平台,机器人检测平台顶端的一侧固定安装有勘测柱,勘测柱的顶端固定安装有可视化摄像头,机器人检测平台顶端远离勘测柱的一侧固定安装有清理台,清理台顶端的两侧均转动连接有智能调节机械臂,两个智能调节机械臂远离清理台的一端均固定安装有机械铲,机器人检测平台两侧的两端均转动安装有安装轴,本实用新型一种城市管道清淤监测一体化机器人,通过设置可视化摄像头和通过智能调节机械臂安装的机械铲,便于工作人员清晰的看到管道内部情况的同时,辅助工作人员进行定期专业化的清淤疏通作业,提高机器人的清洗效率。洗效率。洗效率。
技术研发人员:岳年淞 邓蓉珍 方晓燕 刘通 邱菱
受保护的技术使用者:福州外语外贸学院
技术研发日:2021.11.12
技术公布日:2022/3/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1