喷涂机器人调节式控制箱的制作方法
1.本实用新型涉及控制箱底座技术领域,尤其涉及喷涂机器人调节式控制箱。
背景技术:
2.喷涂机器人是可进行自动喷漆或喷涂其他涂料的工业机器人。喷涂机器人的程序控制装配于控制箱中,目前,传统的控制箱其装配高度固定难以调节,进而造成控制箱在进行装卸维护时,对于底部区域的操作由于高度不够需要工作人员进行下蹲作业,而控制箱中内部结构较为复杂,从而工作人员在长时间的下蹲作业过程中过于麻烦,影响工作效率。
3.因此,如何对控制箱的调节行处理是本领域技术人员目前需要解决的技术问题。
技术实现要素:
4.本实用新型的目的是针对背景技术中存在的问题,提出一种具有调节底座的控制箱。
5.本实用新型的技术方案:喷涂机器人调节式控制箱,包括箱体与底座,所述底座包括固定连接于箱体上的装载板,装载板的下方设有壳体,壳体的内部转动连接有双向蜗杆,双向蜗杆上设有多个蜗轮组,正面所述蜗轮组的上方设置有圆盘一,圆盘一的上方活动连接有回形杆一,背面所述蜗轮组的上方设置有圆盘二,圆盘二的上方活动连接有回形杆二,所述壳体的内部设有多个导向杆,导向杆上活动连接有撑杆一与撑杆二。
6.优选的,所述双向蜗杆的背面一端转动连接于壳体的背面内壁上,且双向蜗杆的正面一端穿过壳体的正面壳壁,并安装有把手。
7.优选的,所述蜗轮组包括有蜗轮一、蜗轮二、蜗轮三与蜗轮四,所述蜗轮一与蜗轮二上通过螺栓连接有转轴一,所述蜗轮三与蜗轮四上通过螺栓连接有转轴二,所述转轴一与转轴二的底端均转动连接于壳体的底部内壁上。
8.优选的,每个所述转轴一的顶端均安装有圆盘一,每个所述转轴二的顶端均安装有圆盘二。
9.优选的,每个所述导向杆上均套设有多个滑块,正面多个所述滑块的顶部均铰接有撑杆二,背面多个所述滑块的顶部均铰接有撑杆一。
10.优选的,相邻所述撑杆一与撑杆二之间相互活动连接,所述回形杆一与回形杆二的两端分别固定连接于滑块上。
11.与现有技术相比,本实用新型具有如下有益的技术效果:
12.通过各种结构的组合使得本装置在进行装卸维护的过程中能够根据工作人员的实际需求对控制箱的箱体进行高度调整,从而避免工作人员在进行控制箱装卸维护时下蹲作业的麻烦,减轻工作人员的负担,提高工作效率。
附图说明
13.图1给出本实用新型一种实施例的局部立体结构示意图;
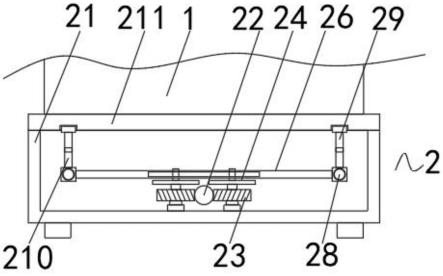
14.图2为图1的正面剖视结构示意图;
15.图3为图2的双向蜗杆的俯视结构示意图;
16.图4为图2的撑杆一与撑杆二侧视结构示意图。
17.附图标记:1、箱体;2、底座;21、壳体;22、双向蜗杆;23、蜗轮组;24、圆盘一;25、圆盘二;26、回形杆一;27、回形杆二;28、导向杆;29、撑杆一;210、撑杆二;211、装载板。
具体实施方式
18.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
19.实施例一
20.如图1-4所示,本实用新型提出的喷涂机器人调节式控制箱,包括箱体1与底座2,底座2包括固定连接于箱体1上的装载板211,装载板211的下方设有壳体21,壳体21的内部转动连接有双向蜗杆22,双向蜗杆22上设有多个蜗轮组23,正面蜗轮组23的上方设置有圆盘一24,圆盘一24的上方活动连接有回形杆一26,背面蜗轮组23的上方设置有圆盘二25,圆盘二25的上方活动连接有回形杆二27,壳体21的内部设有多个导向杆28,导向杆28上活动连接有撑杆一29与撑杆二210。
21.本实施例中,装载板211的底部开设有多个活动槽,活动槽的内部滑动连接有多个活动块,撑杆一29与撑杆二210的顶端分别铰接于活动块上。
22.基于实施例一的喷涂机器人调节式控制箱工作原理是:当箱体1内部的结构单元需要进行装卸维护时,工作人员根据自身的需要旋转把手,带动双向蜗杆22进行旋转,双向蜗杆22的转动带动蜗轮组23进行旋转,进而使得圆盘一24与圆盘二25进行旋转,实现回形杆一26与回形杆二27相互靠近,进而带动导向杆28上的滑块进行移动,使得撑杆一29与撑杆210进行交叉撑起,带动装载板211进行上移,进而实现箱体1进行上移,避免工作人员在对箱体1内部结构单元进行装卸维护时的下蹲作业,提高工作效率,当箱体1维护完成后,反向旋转把手,进而实现装载板211恢复到初始状态。
23.实施例二
24.如图2-4所示,本实用新型提出的喷涂机器人调节式控制箱,相较于实施例一,本实施例还包括:双向蜗杆22的背面一端转动连接于壳体21的背面内壁上,且双向蜗杆22的正面一端穿过壳体21的正面壳壁,并安装有把手,蜗轮组23包括有蜗轮一、蜗轮二、蜗轮三与蜗轮四,蜗轮一与蜗轮二上通过螺栓连接有转轴一,蜗轮三与蜗轮四上通过螺栓连接有转轴二,转轴一与转轴二的底端均转动连接于壳体21的底部内壁上,每个转轴一的顶端均安装有圆盘一24,每个转轴二的顶端均安装有圆盘二25,每个导向杆28上均套设有多个滑块,正面多个滑块的顶部均铰接有撑杆二210,背面多个滑块的顶部均铰接有撑杆一29,相邻撑杆一29与撑杆二210之间相互活动连接,回形杆一26与回形杆二27的两端分别固定连接于滑块上。
25.本实施例中,两个蜗轮组23的整体运动反向相反,从而满足回形杆一26与回形杆二27的反向运动,实现对装载板211的升降调整。
26.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
技术特征:
1.喷涂机器人调节式控制箱,包括箱体(1)与底座(2),其特征在于:所述底座(2)包括固定连接于箱体(1)上的装载板(211),装载板(211)的下方设有壳体(21),壳体(21)的内部转动连接有双向蜗杆(22),双向蜗杆(22)上设有多个蜗轮组(23),正面所述蜗轮组(23)的上方设置有圆盘一(24),圆盘一(24)的上方活动连接有回形杆一(26),背面所述蜗轮组(23)的上方设置有圆盘二(25),圆盘二(25)的上方活动连接有回形杆二(27),所述壳体(21)的内部设有多个导向杆(28),导向杆(28)上活动连接有撑杆一(29)与撑杆二(210)。2.根据权利要求1所述的喷涂机器人调节式控制箱,其特征在于:所述双向蜗杆(22)的背面一端转动连接于壳体(21)的背面内壁上,且双向蜗杆(22)的正面一端穿过壳体(21)的正面壳壁,并安装有把手。3.根据权利要求1所述的喷涂机器人调节式控制箱,其特征在于:所述蜗轮组(23)包括有蜗轮一、蜗轮二、蜗轮三与蜗轮四,所述蜗轮一与蜗轮二上通过螺栓连接有转轴一,所述蜗轮三与蜗轮四上通过螺栓连接有转轴二,所述转轴一与转轴二的底端均转动连接于壳体(21)的底部内壁上。4.根据权利要求3所述的喷涂机器人调节式控制箱,其特征在于:每个所述转轴一的顶端均安装有圆盘一(24),每个所述转轴二的顶端均安装有圆盘二(25)。5.根据权利要求1所述的喷涂机器人调节式控制箱,其特征在于:每个所述导向杆(28)上均套设有多个滑块,正面多个所述滑块的顶部均铰接有撑杆二(210),背面多个所述滑块的顶部均铰接有撑杆一(29)。6.根据权利要求5所述的喷涂机器人调节式控制箱,其特征在于:相邻所述撑杆一(29)与撑杆二(210)之间相互活动连接,所述回形杆一(26)与回形杆二(27)的两端分别固定连接于滑块上。
技术总结
本实用新型涉及控制箱底座技术领域,尤其涉及喷涂机器人调节式控制箱。其技术方案包括:箱体与底座,所述底座包括固定连接于箱体上的装载板,装载板的下方设有壳体,壳体的内部转动连接有双向蜗杆,双向蜗杆上设有多个蜗轮组,正面所述蜗轮组的上方设置有圆盘一,圆盘一的上方活动连接有回形杆一,背面所述蜗轮组的上方设置有圆盘二,圆盘二的上方活动连接有回形杆二,所述壳体的内部设有多个导向杆。本实用新型通过各种结构的组合使得本装置在进行装卸维护的过程中能够根据工作人员的实际需求对控制箱的箱体进行高度调整,从而避免工作人员在进行控制箱装卸维护时下蹲作业的麻烦,减轻工作人员的负担,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:夭思远
受保护的技术使用者:上海澜方实业有限公司
技术研发日:2021.11.03
技术公布日:2022/6/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1