送风装置的制作方法
1.本发明涉及送风装置,尤其涉及包含2个送风机的送风装置。
背景技术:
2.存在一种送风装置,其包含两个以电机为驱动源来使安装于转子的叶轮进行旋转的送风机。作为这样的送风装置,例如存在双重反转式送风机,其具有将叶轮的旋转方向相互不同的2个轴流风扇在旋转轴方向上重叠而构成的结构(例如,参照下记专利文献1)。(现有技术文献)(专利文献)
3.专利文献1:jp特开2004
‑
278370号公报。
技术实现要素:
(发明要解决的课题)
4.在如双重反转式送风机的送风装置中,即使1个送风机发生故障,另一个未发生故障的送风机也能持续旋转,因此能够一定程度地确保风量、静压。
5.然而,在像这样1个送风机发生故障时,为了确保送风装置的整体上的风量、静压,期望未发生故障的送风机以更高的转速进行动作。
6.本发明为了解决这样的问题点而提出,其目的在于,提供一种送风装置,其能够减轻在1个送风机发生故障时的装置整体的风量、静压的下降。(用于解决课题的技术方案)
7.为了达成上述目的,根据本发明的一实施方式,送风装置具备第一送风机和第二送风机,第一送风机和第二送风机分别具有叶轮,第一送风机具有:第一电机,其使第一送风机的叶轮旋转;第一驱动控制单元,其控制第一电机的驱动;以及第一通信单元,其与第二送风机进行通信,第二送风机具有:第二电机,其使第二送风机的叶轮旋转;第二驱动控制单元,其控制第二电机的驱动;以及第二通信单元,其与第一送风机进行通信,第一驱动控制单元基于与第二送风机进行通信的结果对第一电机的驱动进行控制。
8.优选第一驱动控制单元基于与第二送风机进行通信的结果,在以第一驱动模式对第一电机进行驱动还是以与第一驱动模式不同的第二驱动模式对第一电机进行驱动之间进行切换。
9.优选第一驱动模式是以与从外部装置输入的速度指令信息对应的转速对电机进行驱动的驱动模式。
10.优选第二驱动模式是以比对应于速度指令信息的转速更高的规定转速对电机进行驱动的驱动模式。
11.优选第二驱动模式是通过以能输出的最大转矩进行旋转的方式对电机进行驱动的驱动模式。
12.优选第二送风机具有第二异常检测单元,第二异常检测单元用于检测第二送风机
发生异常,在通过第二异常检测单元检测到在第二送风机中发生异常的情况下,第二通信单元向第一送风机发送表示该情况的信息,在第一通信单元接收到表示第二送风机发生异常的信息的情况下,第一驱动控制单元将第一电机的驱动模式从第一驱动模式切换至第二驱动模式。
13.优选第一通信单元以向第二送风机进行询问的方式构成,在以第二送风机未发送针对询问的应答的状态经过规定时间的情况下,第一驱动控制单元将第一电机的驱动模式从第一驱动模式切换至第二驱动模式。
14.优选第一驱动控制单元在以第二驱动模式对第一电机进行驱动时,在通过与第二送风机之间的通信而得到表示第二送风机正常的信息的情况下,将第一电机的驱动模式从第二驱动模式切换至第一驱动模式。
15.优选第二驱动控制单元基于与第一送风机进行通信的结果对第二电机的驱动进行控制。
16.优选第二驱动控制单元基于与第一送风机进行通信的结果,在以第一驱动模式对第二电机进行驱动还是以第二驱动模式对第二电机进行驱动之间进行切换。
17.优选第一送风机具有第一异常检测单元,第一异常检测单元用于检测第一送风机发生异常,在通过第一异常检测单元检测到在第一送风机中发生异常的情况下,第一通信单元向第二送风机发送用于以第二驱动模式对第二电机进行驱动的指示,在第二通信单元接收到用于以第二驱动模式对第二电机进行驱动的指示的情况下,第二驱动控制单元以第二驱动模式对第二电机进行驱动。
18.优选第一通信单元以向第二送风机进行询问的方式构成,在由第一通信单元执行的询问未在规定时间内进行的情况下,第二驱动控制单元将第二电机的驱动模式从第一驱动模式切换至第二驱动模式。
19.优选送风装置具备为了在第一送风机与第二送风机之间进行相互通信而连接的通信线路。
20.优选第一送风机和第二送风机分别是以二者的叶轮的旋转轴中心在轴流方向上对齐的方式配置的轴流风扇,第一送风机与第二送风机使各自的叶轮朝相互不同的方向旋转。(发明效果)
21.根据这些实施方式,能够提供一种送风装置,其能减轻在1个送风机发生故障时的装置整体的风量、静压的下降。
附图说明
22.图1是表示本发明的实施方式之一中的风扇的立体图。图2是表示风扇的构成的框图。图3是表示第一电机驱动控制装置的控制电路部所进行的处理动作的一例的第一流程图。图4是表示第一电机驱动控制装置的控制电路部所进行的处理动作的一例的第二流程图。图5是表示第二电机驱动控制装置的控制电路部所进行的处理动作的一例的第一
流程图。图6是表示第二电机驱动控制装置的控制电路部所进行的处理动作的一例的第二流程图。图7是说明在第一送风机和第二送风机均进行通常的动作的情况下的风扇的动作例的时序图。图8是说明在第二送风机处于异常状态的情况下的风扇的第一动作例的时序图。图9是说明在第二送风机处于异常状态的情况下的风扇的第二动作例的时序图。图10是说明在第一送风机处于异常状态的情况下的风扇的第一动作例的时序图。图11是说明在第一送风机处于异常状态的情况下的风扇的第二动作例的时序图。图12是表示采用多个风扇而构成的送风系统的一例的图。
具体实施方式
23.以下,对本发明的实施方式中的送风装置进行说明。
24.[实施方式]
[0025]
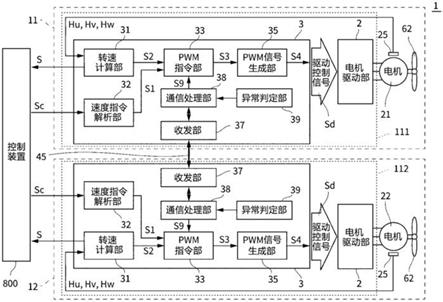
图1是表示本发明的实施方式之一中的风扇1的立体图。图2是表示风扇1的构成的框图。
[0026]
如图1以及图2所示,风扇(送风装置的一例)1是具备分别具有叶轮62的2个送风机11、12(第一送风机11、第二送风机12)的送风装置。在本实施方式中,风扇1具有入口侧(进气侧)的第一送风机11、以及出口侧(排气侧)的第二送风机12。在本实施方式中,在成为一体的框架处安装有第一送风机11和第二送风机12,并构成一体型风扇1。
[0027]
第一送风机11与第二送风机12分别是以二者的叶轮62的旋转轴中心在轴流方向上对齐的方式配置的轴流风扇。第一送风机11和第二送风机12使各自的叶轮62朝相互不同的方向旋转。换言之,在轴向上观察,第一送风机11的叶轮62的旋转方向是与第二送风机12的叶轮62的旋转方向相反的方向。即,风扇1是所谓的双重反转式的送风机。在本实施方式中,风扇1例如是通过风力将在电子计算机、办公设备等电子设备的内部产生的热量向外部排出从而对电子设备的内部进行冷却的风扇电机。
[0028]
风扇1具备为了在第一送风机11与第二送风机12之间进行相互通信而连接的通信线45。关于在第一送风机11与第二送风机12之间进行的通信,将后述。
[0029]
第一送风机11具有使第一送风机11的叶轮62旋转的第一电机21、以及第一电机驱动控制装置(第一驱动控制单元、第一通信单元、第一异常检测单元的一例)111。在第一电机21的转子的旋转轴安装有叶轮62。
[0030]
第二送风机12具有使第二送风机12的叶轮62旋转的第二电机22、以及第二电机驱动控制装置(第二驱动控制单元、第二通信单元、第二异常检测单元的一例)112。在第二电机22的转子的旋转轴安装有叶轮62。
[0031]
以下,有时不区分第一电机21与第二电机22而标记为电机21、22。另外,有时不区分第一电机驱动控制装置111与第二电机驱动控制装置112而标记为电机驱动控制装置111、112。
[0032]
各电机驱动控制装置111、112驱动电机21、22。在本实施方式中,电机21、22例如是3相的无刷电机。各电机驱动控制装置111、112通过在电机21、22的线圈中周期性地流过驱
动电流,从而使电机21、22旋转。
[0033]
风扇1与作为外部装置的一例的控制装置800连接。在本实施方式中,控制装置800向各送风机11、12输出与电机21、22的旋转速度(转速)对应的速度指令信号sc(速度指令信息的一例)。速度指令信号sc被输入至各电机驱动控制装置111、112。各电机驱动控制装置111、112能以与速度指令信号sc对应的转速对电机21、22进行驱动。此外,各电机驱动控制装置111、112将与电机21、22对应的转速信号s(例如,fg信号等)输出至控制装置800。控制装置800能够基于转速信号s来检测各送风机11、12的驱动状态,并根据该检测对输出的速度指令信号sc进行控制等。此外,可以不将转速信号s输出至风扇1的外部。
[0034]
在本实施方式中,第一电机驱动控制装置111与第二电机驱动控制装置112除了如后所述相互进行通信的部分的具体的动作等以外,进行大致相同的动作。
[0035]
如后所述,第一电机驱动控制装置111发挥以下功能:作为对第一电机21的驱动进行控制的第一驱动控制单元、作为与第二送风机12进行通信的第一通信单元以及作为对第一送风机11发生异常进行检测的第一异常检测单元。另外,第二电机驱动控制装置112发挥以下功能:作为对第二电机22的驱动进行控制的第二驱动控制单元、作为与第一送风机11进行通信的第二通信单元以及作为对第二送风机12发生异常进行检测的第二异常检测单元。
[0036]
第一电机驱动控制装置111和第二电机驱动控制装置112具有相同的硬件构成。以下,针对第一电机驱动控制装置111与第二电机驱动控制装置112共同的组成部分,使用同一标号进行标记,且针对这些组成部分进行的说明除了特别记载的情况以外,对于第一电机驱动控制装置111与第二电机驱动控制装置112分别是通用的。
[0037]
各电机驱动控制装置111、112具有电机驱动部2和控制电路部3。此外,图2所示的电机驱动控制装置111、112的组成部分是全体的一部分,电机驱动控制装置111、112在图1所示的基础上还可以具有其他组成部分。
[0038]
在本实施方式中,各电机驱动控制装置111、112是一部分(例如,控制电路部3以及电机驱动部2)被封装的集成电路装置(ic)。此外,既可以将各电机驱动控制装置111、112全部封装为1个集成电路装置,也可以与其他装置一起对各电机驱动控制装置111、112的全部或一部分进行封装来构成1个集成电路装置。
[0039]
电机驱动部2具有逆变器电路以及预驱动电路。电机驱动部2基于从控制电路部3输出的驱动控制信号sd,向电机21、22输出驱动信号,来对电机21、22进行驱动。
[0040]
预驱动电路基于控制电路部3的控制,生成用于驱动逆变器电路的输出信号并输出至逆变器电路。逆变器电路基于从预驱动电路输出的输出信号向电机21、22输出驱动信号,从而在电机21、22所具备线圈中通电。
[0041]
向控制电路部3输入从控制装置800输出的速度指令信号sc。另外,控制电路部3向控制装置800输出转速信号s。
[0042]
速度指令信号sc是与电机21、22的旋转速度相关的信号。例如,速度指令信号sc是与电机21、22的目标旋转速度对应的pwm(脉冲宽度调制)信号。换言之,速度指令信号sc是与电机21、22的旋转速度的目标值对应的速度指令信息。此外,可以输入时钟信号作为速度指令信号sc。
[0043]
另外,在本实施方式中,从电机21、22向控制电路部3输入3个霍尔信号(位置检测
信号)hu、hv、hw。霍尔信号hu、hv、hw例如是配置于电机21、22的3个霍尔(hall)元件25u、25v、25w的输出信号。霍尔信号hu、hv、hw是与电机21、22的转子的旋转对应的信号。控制电路部3使用霍尔信号hu、hv、hw检测电机21、22的旋转状态,并对电机21、22的驱动进行控制。即,控制电路部3使用霍尔信号hu、hv、hw检测电机21、22的转子的旋转位置,并对电机21、22的驱动进行控制。另外,控制电路部3能使用霍尔信号hu、hv、hw得到与电机21、22的转子的实际的转速相关的实际转速信息,并对电机21、22的驱动进行控制。
[0044]
输出霍尔信号hu、hv、hw的3个霍尔元件25(在图2中为了简化,针对电机21、22,示出了1个霍尔元件25)例如相互大致等间隔(与相邻的霍尔元件间隔120度)地配置在电机21、22的转子的周围。3个霍尔元件25分别对电机21、22的转子的磁极进行检测,并输出霍尔信号hu、hv、hw。
[0045]
此外,还可以构成为:在控制电路部3中,除了输入这样的霍尔信号hu、hv、hw以外,或者取代霍尔信号hu、hv、hw,还输入与电机21、22的旋转状态相关的其他信息。例如,可以输入使用设置在位于转子一侧的基板的线圈图案而生成的信号(图案fg),作为与电机21、22的转子的旋转对应的fg信号。另外,可以构成为:基于对电机21、22的各相(u、v、w相)的感应反电动势进行检测的旋转位置检测电路的检测结果,来检测电机21、22的旋转状态。还可以设置编码器、旋转变压器等,并由此来检测电机21、22的旋转速度等信息。
[0046]
控制电路部3例如由微型计算机、数字电路等构成。控制电路部3基于输入的信号,来输出用于驱动电机21、22的驱动控制信号sd。具体而言,控制电路部3基于霍尔信号hu、hv、hw,将驱动控制信号sd输出至电机驱动部2。
[0047]
控制电路部3将用于驱动电机21、22的驱动控制信号sd输出至电机驱动部2,来进行电机21、22的旋转控制。电机驱动部2基于驱动控制信号sd,向电机21、22输出驱动信号来对电机21、22进行驱动。
[0048]
控制电路部3具有转速计算部31、速度指令解析部32、pwm指令部33、pwm信号生成部35、收发部37、通信处理部38以及异常判定部39。
[0049]
向转速计算部31输入从3个霍尔元件25输出的霍尔信号hu、hv、hw。转速计算部31基于所输入的霍尔信号hu、hv、hw,来输出表示各相与电机21、22的转子的位置关系的位置信号。另外,转速计算部31基于霍尔信号hu、hv、hw,生成并输出与位置信号的周期对应的实际转速信息。即,转速计算部31输出与电机21、22的转子的实际的转速相关的实际转速信息。在图中,结合位置信号与实际转速信息,示出了实际旋转信号s2。实际旋转信号s2被输出至pwm指令部33。
[0050]
向速度指令解析部32输入速度指令信号sc。速度指令解析部32基于速度指令信号sc来输出表示电机21、22的目标转速的目标转速信号s1。目标转速信号s1是表示与速度指令信号sc对应的占空比的pwm信号。目标转速信号s1被输出至pwm指令部33。
[0051]
向pwm指令部33输入从转速计算部31输出的实际旋转信号s2以及从速度指令解析部32输出的目标转速信号s1。另外,还向pwm指令部33输入如后所述从通信处理部38输出的设定信号s9。pwm指令部33生成并输出表示用于输出驱动控制信号sd的占空比的pwm设定指示信号s3。pwm设定指示信号s3被输出至pwm信号生成部35。
[0052]
向pwm信号生成部35输入pwm设定指示信号s3。pwm信号生成部35基于pwm设定指示信号s3来生成用于驱动电机驱动部2的pwm信号s4。pwm信号s4例如是占空比与pwm设定指示
信号s3的占空比相同的信号。换言之,pwm信号s4是具有与pwm设定指示信号s3对应的占空比的信号。
[0053]
从pwm信号生成部35输出的pwm信号s4作为驱动控制信号sd而从控制电路部3输出至电机驱动部2。由此,从电机驱动部2向电机21、22输出驱动信号,对电机21、22进行驱动。
[0054]
收发部37是进行通信的接口。第一送风机11的收发部37经由通信线路45与第二送风机12的收发部37连接。通信线路45既可以是1根,也可以是多根,通信既可以是串行通信,也可以是并行通信。第一送风机11的收发部37能与第二送风机12的收发部37进行通信。与通信相关的控制由通信处理部38进行。
[0055]
通信处理部38控制收发部37的动作,并对第一送风机11与第二送风机12之间的通信进行控制。即,第一送风机11的通信处理部38控制第一送风机11的收发部37,来进行与第二送风机12之间的通信。如后所述,通信处理部38根据第一送风机11与第二送风机12之间的通信的内容,来向pwm指令部33输出设定信号s9。
[0056]
在本实施方式中,第一送风机11和第二送风机12以第一送风机11为主机、且以第二送风机12为从机而能进行相互通信的方式构成。例如,第一送风机11的通信处理部38经由收发部37对第二送风机12进行关于第二送风机12的状态的询问。即,询问以将表示第二送风机12中的第二电机22的驱动状态的信息发送至第一电机驱动控制装置111的方式进行请求。第二送风机12的通信处理部38若经由收发部37接收到来自第一送风机11的询问,则经由收发部37对第一送风机11发送与第二送风机12的状态即第二电机22的驱动状态相关的消息来作为对询问的响应。此外,第一送风机11和第二送风机12例如能够如下进行相互通信:从第一送风机11对第二送风机12发送规定的指示命令、且从第二送风机12对第一送风机11发送针对指示命令的应答。如上所述,第一电机驱动控制装置111的控制电路部3中的收发部37和通信处理部38具有作为第一通信单元的直接功能,第二电机驱动控制装置112的控制电路部3中的收发部37和通信处理部38具有作为第二通信单元的直接功能。
[0057]
异常判定部39检测送风机11、12是否发生异常。即,异常判定部39判定送风机11、12是否处于异常状态。在第一送风机11的异常判定部39检测到第一送风机11发生异常的情况下,第一送风机11的通信处理部38进行与之相应的动作。另外,在第二送风机12的异常判定部39检测到第二送风机12发生异常的情况下,第二送风机12的通信处理部38进行与之相应的动作。如上所述,第一电机驱动控制装置111的控制电路部3中的异常判定部39具有作为第一异常检测单元的直接功能,第二电机驱动控制装置112的控制电路部3中的异常判定部39具有作为第二异常检测单元的直接功能。
[0058]
例如在电机21、22中发生断线等导致电机21、22无法被正常驱动的情况下,异常判定部39检测到异常发生。另外,例如,在因异物卡入叶轮62等导致电机21、22成为锁止状态的情况下,检测到异常发生。应予说明,异常的内容不限于这些。即,用于对异常发生的状态进行直接检测的对象(例如,转速、温度、电流等的异常)是多种多样的,在本实施方式中,检测的对象不受特别限定。
[0059]
在本实施方式中,控制电路部3具有第一驱动模式和第二驱动模式作为对电机21、22进行驱动的驱动模式。第一驱动模式是以与速度指令信号sc对应的转速对电机21、22进行驱动的驱动模式。第二驱动模式是以比与速度指令信息对应的转速更高的规定转速对电机21、22进行驱动的驱动模式。
[0060]
在本实施方式中,第二驱动模式是与所输入的速度指令信号sc无关地以规定转速对电机21、22进行驱动的驱动模式。更具体而言,第二驱动模式是以能输出的最大的转矩进行旋转的方式对电机21、22进行驱动的驱动模式。换言之,第二驱动模式是以如下方式对电机21、22进行驱动的驱动模式:使在各送风机11、12中电机21、22以能旋转的最大转速(规定转速的一例)进行旋转。
[0061]
在控制电路部3以第一驱动模式进行动作的情况下,pwm指令部33基于实际旋转信号s2即位置信号和实际转速信息、以及目标转速信号s1,来输出pwm设定指示信号s3。具体而言,pwm指令部33将目标转速信号s1和与电机21、22的转速对应的实际转速信息进行比较,并以使电机21、22的旋转速度与目标转速信号s1对应的方式生成pwm设定指示信号s3。如此生成pwm设定指示信号s3,因此从控制电路部3输出基于速度指令信号sc而得到的驱动控制信号sd,并以与速度指令信号sc对应的转速对电机21、22进行驱动。
[0062]
另一方面,在控制电路部3以第二驱动模式进行动作的情况下,pwm指令部33与目标转速信号s1无关地输出以规定形态生成的pwm设定指示信号s3。具体而言,pwm指令部33以使在各送风机11、12中电机21、22以能旋转的最大的转速进行旋转的方式生成pwm设定指示信号s3。例如,在能从pwm信号生成部35输出的pwm信号s4和能从pwm指令部33输出的pwm设定指示信号s3的占空比的最大值为100%、且输出占空比为100%的pwm信号s4时能驱动电机21、22的情况下,pwm指令部33生成并输出占空比为100%的pwm设定指示信号s3。由于从电机驱动控制装置111、112如此生成pwm设定指示信号s3,因此控制电路部3输出不基于速度指令信号sc的驱动控制信号sd,电机21、22以能旋转的最大的转速进行驱动。
[0063]
在第一送风机11和第二送风机12均正常驱动的情况下,各自的控制电路部3以第一驱动模式进行动作。即,第一送风机11和第二送风机12分别以基于速度指令信号sc的转速被驱动。
[0064]
在此,在本实施方式中,第一送风机11与第二送风机12经由通信线路45进行通信。然后,第一电机驱动控制装置111基于与第二送风机12进行通信的结果对第一电机21的驱动进行控制。具体而言,第一电机驱动控制装置111的控制电路部3基于与第二送风机12的第二电机驱动控制装置112进行通信的结果,在以第一驱动模式对第一电机21进行驱动还是以与第一驱动模式不同的第二驱动模式对第一电机21进行驱动之间进行切换。另外,第二电机驱动控制装置112基于与第一送风机11进行通信的结果对第二电机22的驱动进行控制。具体而言,第二电机驱动控制装置112的控制电路部3基于与第一送风机11的第一电机驱动控制装置111进行通信的结果,在以第一驱动模式对第二电机22进行驱动还是以第二驱动模式对第二电机22进行驱动之间进行切换。
[0065]
驱动模式的切换例如按如下方式进行。在本实施方式中,关于控制电路部3以第一驱动模式和第二驱动模式中的哪一个模式进行动作,根据从通信处理部38输出的设定信号s9而变更。即,通信处理部38进行对控制电路部3的驱动模式进行切换的控制。
[0066]
驱动模式的切换根据响应内容而进行,所述响应内容对应于从主机侧的第一送风机11对从机侧的第二送风机12所发送的询问而从第二送风机12发送。
[0067]
具体而言,若第一送风机11对第二送风机12进行询问,则与之相应,第二电机驱动控制装置112将正常应答或异常应答发送至第一电机驱动控制装置111。
[0068]
即,在第一送风机11对第二送风机12进行询问时,若第二电机22的驱动状态为正
常,则表示该意思的信息从第二电机驱动控制装置112被发送至第一电机驱动控制装置111(正常应答)。如此在第一送风机11和第二送风机12均正常驱动的情况下,各自的控制电路部3以第一驱动模式进行动作。
[0069]
另一方面,在第一送风机11对第二送风机12进行询问时,若第二电机22的驱动状态不正常,则表示该意思的信息被发送至第一电机驱动控制装置111。即,在第二电机驱动控制装置112中,在由异常判定部39检测到第二送风机12发生异常的情况下,通信处理部38经由收发部37将表示该内容的信息发送至第一送风机11(异常应答)。在第一电机驱动控制装置111中,通信处理部38在接收到表示第二送风机12发生异常的信息的情况下,将第一电机21的驱动模式从第一驱动模式切换至第二驱动模式。即,第一送风机11的通信处理部38对应于从第二电机驱动控制装置112发送的异常应答,将设定信号s9输出至pwm指令部33。如此,pwm指令部33从基于目标转速信号s1输出pwm设定指示信号s3的状态切换至以第一电机21按照规定转速进行旋转的方式输出pwm设定指示信号s3的状态。由此,未发生异常的第一送风机11以第二驱动模式进行驱动。
[0070]
另外,驱动模式的切换也在异常判定部39检测到第一送风机11发生异常的情况下进行。
[0071]
即,在第一电机驱动控制装置111中,通信处理部38经由收发部37将用于以第二驱动模式对第二电机22进行驱动的指示发送至第二送风机12。在第二电机驱动控制装置112中,通信处理部38在接收到用于以第二驱动模式对第二电机22进行驱动的指示的情况下,将第二电机22的驱动模式从第一驱动模式切换至第二驱动模式。即,第二送风机12的通信处理部38按照接收到的指示,将设定信号s9输出至pwm指令部33。如此,pwm指令部33从基于目标转速信号s1输出pwm设定指示信号s3的状态切换至以第二电机22按照规定转速进行旋转的方式输出pwm设定指示信号s3的状态。由此,未发生异常的第二送风机12以第二驱动模式进行驱动。
[0072]
另外,驱动模式的切换是对应于有无从主机侧的第一送风机11对从机侧的第二送风机12发送的询问、有无针对该询问的响应而进行的。
[0073]
具体而言,从第一电机驱动控制装置111向第二送风机12的询问被定期进行,在第一电机驱动控制装置111的询问经规定时间未进行的情况下,第二电机驱动控制装置112将第二电机22的驱动模式从第一驱动模式切换至第二驱动模式。由此,例如有可能在第一送风机11中出现因无法再供给电源电压等从而造成控制电路部3无法再工作的异常的情况下,未发生异常的第二送风机12以第二驱动模式进行驱动。
[0074]
另外,从进行询问后,在第二送风机12未针对发送至第二送风机12的询问发送应答的状态下,经过规定时间,在此种情况下,第一电机驱动控制装置111将第一电机21的驱动模式从第一驱动模式切换至第二驱动模式。由此,例如有可能在第二送风机12中出现因无法再供给电源电压等从而造成控制电路部3无法再工作的异常的情况下,未发生异常的第一送风机11以第二驱动模式进行驱动。
[0075]
此外,第一电机驱动控制装置111在以第二驱动模式对第一电机21进行驱动时,在通过与第二送风机12之间的通信得到表示第二送风机12正常的信息的情况下,将第一电机21的驱动模式从第二驱动模式切换至第一驱动模式。另外,第二电机驱动控制装置112在以第二驱动模式对第二电机22进行驱动时,在通过与第一送风机11之间的通信得到表示第一
送风机11正常的信息的情况下,将第二电机22的驱动模式从第二驱动模式切换至第一驱动模式。由此,在异常状态消除的情况下,自动地进行当初进行的基于速度指令信号sc的电机21、22的驱动控制。
[0076]
图3是表示第一电机驱动控制装置111的控制电路部3所进行的处理动作的一例的第一流程图。图4是表示第一电机驱动控制装置111的控制电路部3所进行的处理动作的一例的第二流程图。
[0077]
在图3以及图4的说明中,除了特别记载的情况以外,示出针对第一送风机11的构成的动作。
[0078]
如图3所示,在步骤s11中,通信处理部38判断是否由异常判定部39判定为第一送风机11处于发生异常的异常状态。在判定为处于异常状态的情况下前进至步骤s14(“是”),在未判定为处于异常状态的情况下前进至步骤s12(“否”)。
[0079]
在步骤s12中,控制电路部3进行与速度指令信号sc相应的第一电机21的驱动控制。即,通过pwm指令部33基于速度指令信号sc输出pwm设定指示信号s3,并从控制电路部3输出驱动控制信号sd,从而通过电机驱动部2对第一电机21进行驱动。即,以第一驱动模式对第一电机21进行驱动。
[0080]
在步骤s13中,通信处理部38判断进行询问的确认时刻是否已到来。确认时刻例如是从上次进行询问起经过规定时间的时刻。若确认时刻已到来(“是”),则前进至图4的步骤s17。另一方面,若确认时刻未到来(“否”),则返回至步骤s11。
[0081]
在步骤s14中,通信处理部38通过收发部37将最大旋转请求命令发送至第二送风机12。最大旋转请求命令是用于以第二驱动模式对第二电机22进行驱动的指示。通过发送最大旋转请求命令,从而第二电机22的驱动模式从第一驱动模式切换至第二驱动模式,第二电机22以能旋转的最大的转速进行驱动。
[0082]
在步骤s15中,通信处理部38判断是否由异常判定部39判定为第一送风机11不处于异常状态。在判定为不处于异常状态的情况下前进至步骤s16(“是”),在未判定为不处于异常状态的情况(即,判定为异常状态的情况)下反复执行步骤s15(“否”)。
[0083]
在步骤s16中,通信处理部38通过收发部37将恢复命令发送至第二送风机12。恢复命令是用于以第一驱动模式对第二电机22进行驱动的指示。通过发送恢复命令,从而第二电机22的驱动模式从第二驱动模式切换至第一驱动模式,第二电机以与速度指令信号sc相应的转速进行驱动。若步骤s16的处理被执行,则返回至步骤s11。
[0084]
如图4所示,在步骤s17中,通信处理部38对第二送风机12进行询问。即,通信处理部38通过收发部37将旋转状态的确认命令(以下,有时仅称为确认命令)发送至第二送风机12。
[0085]
在步骤s18中,通信处理部38判断是否接收到从第二送风机12发送的正常应答。在接收到正常应答的情况下,返回至图3的步骤s11(“是”)。在未接收到正常应答的情况下,前进至步骤s19(“否”)。
[0086]
在步骤s19中,通信处理部38判断是否接收到从第二送风机12发送的异常应答。在接收到异常应答的情况下,前进至步骤s21(“是”)。在未接收到异常应答的情况下,前进至步骤s20(“否”)。
[0087]
在步骤s20中,通信处理部38判断从发送确认命令起是否经过规定时间。在从发送
确认命令起经过规定时间的情况下,前进至步骤s21(“是”)。在从发送确认命令起未经过规定时间的情况下,返回至步骤s18(“否”)。
[0088]
在步骤s21中,控制电路部3以第一电机21按照能旋转的最大转速被驱动的方式进行控制。即,通信处理部38输出设定信号s9。pwm指令部33根据设定信号s9,以第一电机21按照最大的转速进行旋转的方式,输出不基于速度指令信号sc的pwm设定指示信号s3。通过根据如此输出的pwm设定指示信号s3从控制电路部3输出驱动控制信号sd,从而以第二驱动模式对第一电机21进行驱动。
[0089]
在以第二驱动模式对第一电机21进行驱动时,在步骤s22中,通信处理部38判断进行询问的确认时刻是否到来。若确认时刻未到来(“否”),则返回至步骤s21,并继续第二驱动模式下的驱动。若确认时刻到来(“是”),则返回至步骤s17。
[0090]
即,在以第二驱动模式对第一电机21进行驱动时,通信处理部38定期地进行与第二送风机12之间的通信(步骤s17),若从第二送风机12收到正常应答(在步骤s18中为“是”),则将动作模式从第二驱动模式返回至第一驱动模式(在步骤s11中为“否”,步骤s12)。另一方面,在从第二送风机12收到异常应答的情况下(在步骤s19中为“是”)或从确认命令的发送(步骤s17)起经过规定时间的情况下(在步骤s20中为“是”),继续第二驱动模式下的驱动。
[0091]
图5是表示第二电机驱动控制装置112的控制电路部3所进行的处理动作的一例的第一流程图。图6是表示第二电机驱动控制装置112的控制电路部3所进行的处理动作的一例的第二流程图。
[0092]
在图5以及图6的说明中,除了特别记载的情况以外,示出针对第二送风机12的构成的动作。
[0093]
如图5所示,在步骤s31中,控制电路部3进行与速度指令信号sc相应的第二电机22的驱动控制。即,通过pwm指令部33基于速度指令信号sc输出pwm设定指示信号s3,并从控制电路部3输出驱动控制信号sd,从而由电机驱动部2对第二电机22进行驱动。即,以第一驱动模式对第二电机22进行驱动。
[0094]
在步骤s32中,通信处理部38判断是否接收到从第一送风机11发送的最大旋转请求命令。在接收到最大旋转请求命令的情况下,前进至步骤s33(“是”)。在未接收到最大旋转请求命令的情况下,前进至步骤s35(“否”)。
[0095]
在步骤s33中,控制电路部3以第二电机22按照能旋转的最大转速被驱动的方式进行控制。即,通信处理部38输出设定信号s9。pwm指令部33根据设定信号s9,以第二电机22按照最大的转速进行旋转的方式,输出不基于速度指令信号sc的pwm设定指示信号s3。通过根据如此输出的pwm设定指示信号s3从控制电路部3输出驱动控制信号sd,从而以第二驱动模式对第二电机22进行驱动。换言之,第二电机22的驱动模式从第一驱动模式被切换至第二驱动模式。
[0096]
如此,在通过接收到最大旋转请求命令,从而以第二驱动模式对第二电机22进行驱动时,在步骤s34中,通信处理部38判断是否接收到从第一送风机11发送的恢复命令。在未接收到恢复命令的情况下(“否”),返回至步骤s33,并继续第二驱动模式下的驱动。另一方面,在接收到恢复命令的情况下(“是”),返回至步骤s31,并将动作模式从第二驱动模式返回至第一驱动模式(步骤s31)。
[0097]
在步骤s35中,通信处理部38判断是否接收到从第一送风机11发送的旋转状态的确认命令。在接收到确认命令的情况下,前进至图6的步骤s39(“是”)。在未接收到确认命令的情况下,前进至步骤s36(“否”)。
[0098]
在步骤s36中,通信处理部38判断从上次接收到确认命令的定时起是否经过规定时间。在从上次接收到的定时起经过规定时间的情况下,前进至步骤s37(“是”)。在从上次接收到的定时起未经过规定时间的情况下,返回至步骤s32(“否”)。
[0099]
在步骤s37中,控制电路部3以第二电机22按照能旋转的最大转速被驱动的方式进行控制。即,通信处理部38输出设定信号s9。pwm指令部33根据设定信号s9,以第二电机22按照最大的转速进行旋转的方式,输出不基于速度指令信号sc的pwm设定指示信号s3。通过根据如此输出的pwm设定指示信号s3从控制电路部3输出驱动控制信号sd,从而以第二驱动模式对第二电机22进行驱动。
[0100]
如此,在通过从上次接收到确认命令的定时起经过规定时间,从而以第二驱动模式对第二电机22进行驱动时,在步骤s38中,通信处理部38判断是否接收到从第一送风机11发送的旋转状态的确认命令。若未接收到确认命令(“否”),则返回至步骤s37,继续第二驱动模式下的驱动。在接收到确认命令时(“是”),前进至图6的步骤s39。
[0101]
即,在通过从上次接收到确认命令的定时起经过规定时间,从而以第二驱动模式对第二电机22进行驱动时,通信处理部38直至接收到来自第一送风机11的确认命令为止,都继续第二驱动模式下的驱动。在接收到确认命令的情况下,在以如下方式对确认命令进行应答的基础上,将动作模式从第二驱动模式返回至第一驱动模式(步骤s31)。
[0102]
如图6所示,在步骤s39中,通信处理部38判断是否由异常判定部39判定为第二送风机12处于发生异常的异常状态。在判定为处于异常状态的情况下,前进至步骤s40(“是”),在未判定为处于异常状态的情况下,前进至步骤s42(“否”)。
[0103]
在步骤s40中,通信处理部38通过收发部37将表示第二送风机12异常的信息(异常应答)发送至第一送风机11。由此,在第一送风机11中,以第二驱动模式对第一电机21进行驱动。
[0104]
在进行异常应答后,在步骤s41中,通信处理部38判断是否由异常判定部39判定为第二送风机12不处于异常状态。在未判定为不处于异常状态的情况下,反复执行步骤s41(“否”),在判定为不处于异常状态的情况下,前进至步骤s42(“是”)。
[0105]
在步骤s42中,通信处理部38通过收发部37将表示第二送风机12正常的信息(正常应答)发送至第一送风机11。在此情况下,在第一送风机11中,驱动模式变为第一驱动模式,并以与速度指令信号sc相应的转速对第一电机21进行驱动。即,在以第一驱动模式对第一电机21进行驱动的情况下,保持继续以第一驱动模式对第一电机21进行驱动。另一方面,在以第二驱动模式对第一电机21进行驱动的情况下,将动作模式从第二驱动模式切换成第一驱动模式,并对第一电机21进行驱动。
[0106]
如此,在本实施方式中,第一送风机11与第二送风机12基于相互之间的通信结果对电机21、22的驱动进行控制,因此风扇1作为整体如以下图7至图11所示的方式进行动作。此外,在各送风机11、12中进行的动作的详细说明如上所述,因此在下文中有时省略说明。
[0107]
图7是说明在第一送风机11和第二送风机12均进行通常的动作的情况下的风扇1的动作例的时序图。
[0108]
如图7所示,在主机侧的第一送风机11处于正常的状态的情况下,定期地对从机侧的第二送风机12发送旋转状态的确认命令(步骤s101)。即,第一送风机11向第二送风机12确认第二电机22的旋转状态。
[0109]
如此,第二送风机12由于以正常的状态驱动第二电机22,因此将表示正常的信息发送至第一送风机11(步骤s102)。即,第二送风机12进行正常应答。
[0110]
如此,在各送风机11、12处于正常的状态时,各送风机11、12以第一驱动模式对电机21、22进行驱动。
[0111]
图8是说明在第二送风机12处于异常状态的情况下的风扇1的第一动作例的时序图。
[0112]
如图8所示,在第一送风机11处于正常的状态的情况下,定期地对第二送风机12发送旋转状态的确认命令(步骤s111)。
[0113]
如此,第二送风机12由于处于异常状态,因此将表示异常的信息发送至第一送风机11(步骤s112)。即,第二送风机12进行异常应答。
[0114]
若如此从第二送风机12发送异常应答,则第一送风机11以最大转速驱动第一电机21(步骤s113)。即,在第一送风机11中,以第二驱动模式对第一电机21进行驱动。
[0115]
其后,假设在第二送风机12中异常已消除的情况。此时,若从第一送风机11对第二送风机12发送旋转状态的确认命令(步骤s114),则第二送风机12发送正常应答(步骤s115)。
[0116]
若如此从第二送风机12发送正常应答,则第一送风机11以按照与速度指令信号sc对应的转速进行旋转的方式对第一电机21进行驱动(步骤s116)。即,在第一送风机11中,动作模式从第二驱动模式切换至第一驱动模式。由此,第一送风机11和第二送风机12均返回至以第一驱动模式对电机21、22进行驱动的状态。
[0117]
图9是说明在第二送风机12处于异常状态的情况下的风扇1的第二动作例的时序图。
[0118]
如图9所示,在第一送风机11处于正常的状态的情况下,定期地对第二送风机12发送旋转状态的确认命令(步骤s121)。
[0119]
在此,在第二送风机12处于异常状态,并在从发送确认命令起规定时间内不能进行针对确认命令的应答的情况下(步骤s122),第一送风机11会检测到该情况。
[0120]
如此,第一送风机11以最大转速对第一电机21进行驱动(步骤s123)。即,在第一送风机11中,以第二驱动模式对第一电机21进行驱动。
[0121]
其后,若在第二送风机12中消除异常,则从第一送风机11对第二送风机12发送旋转状态的确认命令(步骤s124),随之从第二送风机12向第一送风机11发送正常应答(步骤s125)。由此,第一送风机11进行以与速度指令信号sc对应的转速对第一电机21进行驱动的控制(步骤s126)。即,第一送风机11和第二送风机12均返回至以第一驱动模式对电机21、22进行驱动的状态。
[0122]
图10是说明在第一送风机11处于异常状态的情况下的风扇1的第一动作例的时序图。
[0123]
如图10所示,在第一送风机11处于异常状态的情况下,第一送风机11对第二送风机12发送最大旋转请求命令(步骤s151)。
[0124]
如此,第二送风机12由于以正常的状态对第二电机22进行驱动,因此将正常的意思发送至第一送风机11(步骤s152)。即,第二送风机12进行正常应答。此外,第二送风机12也可以不进行正常应答,而是发送接收到最大旋转请求命令的意思的回答,或者不进行针对第一送风机11的应答。
[0125]
另外,接收到最大旋转请求命令的第二送风机12以最大转速(步骤s153)对第二电机22进行驱动。即,在第二送风机12中,动作模式从第一驱动模式切换至第二驱动模式,并以第二驱动模式对第二电机22进行驱动。
[0126]
其后,假设在第一送风机11中异常已消除的情况。此时,从第一送风机11对第二送风机12发送用于请求恢复至通常的驱动模式即第一驱动模式的恢复命令(步骤s154)。
[0127]
若如此从第一送风机11发送恢复命令,则第二送风机12发送正常应答(步骤s155)。另外,第二送风机12以与速度指令信号sc对应的转速进行旋转的方式对第二电机22进行驱动(步骤s156)。即,在第二送风机12中,动作模式从第二驱动模式切换至第一驱动模式。由此,第一送风机11和第二送风机12均返回至以第一驱动模式对电机21、22进行驱动的状态。
[0128]
图11是说明在第一送风机11处于异常状态的情况下的风扇1的第二动作例的时序图。
[0129]
如图11所示,在第一送风机11处于正常的状态的情况下,对第二送风机12发送旋转状态的确认命令(步骤s161)。相对于此,第二送风机12在处于正常的状态的情况下,对第一送风机11发送正常应答(步骤s162)。
[0130]
在此,若第一送风机11变成异常状态,则无法进行从第一送风机11对第二送风机12的确认命令的发送。在从上次发送确认命令起,未发送确认命令而经过规定时间的情况下(步骤s163),第二送风机12会检测到该情况。
[0131]
如此,第二送风机12以最大转速对第二电机22进行驱动(步骤s164)。即,在第二送风机12中,以第二驱动模式对第二电机22进行驱动。
[0132]
其后,若在第一送风机11中消除异常,则再次开始从第一送风机11对第二送风机12的旋转状态的确认命令的发送(步骤s165)。此外,此时,第一送风机11可以向第二送风机12发送恢复命令。
[0133]
若如此从第一送风机11发送确认命令,则第二送风机12发送正常应答(步骤s166)。另外,第二送风机12以与速度指令信号sc对应的转速进行旋转的方式对第二电机22进行驱动(步骤s167)。即,在第二送风机12中,动作模式从第二驱动模式切换至第一驱动模式。由此,第一送风机11和第二送风机12均返回至以第一驱动模式对电机21、22进行驱动的状态。
[0134]
图12是表示采用多个风扇1而构成的送风系统801的一例的图。
[0135]
如图12所示,风扇1能多台汇集使用。例如,送风系统801具有1个控制装置800和4个风扇1(风扇1a、1b、1c、1d)。各风扇1连接于控制装置800。各风扇1的送风机11、12在动作模式为第一驱动模式时,基于从控制装置800输入的速度指令信号sc来对电机21、22进行驱动。在各风扇1中,第一送风机11与第二送风机12以能经由通信线路45相互通信的方式连接。
[0136]
送风系统801例如对于冷却对象即电子计算机等电子设备900,从风扇1进行送风。
电子设备900由电源装置、cpu、存储器、存储装置、周边装置等构成。电子设备900能够通过从送风系统801送往电子设备900的内部的风,从而被冷却,并维持正常动作的状态。
[0137]
在此,在本实施方式中,如上所述,在各风扇1中的送风机11、12当中的其中一个发生异常而叶轮62无法旋转时,送风机11、12当中的另一个的动作模式从第一动作模式切换至第二动作模式。在第二动作模式下,能使叶轮62以更高的转速进行旋转。因此,能够将因送风机11、12当中的其中一个发生异常而下降的送风能力,通过送风机11、12当中的另一个来弥补。由此,在发生异常的风扇1被更换成正常的风扇为止的期间,也能向冷却对象送出大量的风。
[0138]
一般而言,在包含2个送风机11、12的风扇1中,在能按照用途而充分确保风扇1的整体的风量、静压的情况下,将各送风机11、12的转速的可控制范围(例如,能够通过从控制装置800向各送风机11、12输出速度指令信号sc来进行转速的反馈控制的转速的范围)设定为比各送风机11、12自身能旋转的最大转速更受限的范围的情况较多。
[0139]
如此在各送风机11、12的转速的可控制范围比送风机11、12自身的能力更受限的情况下,例如在第二送风机12发生故障时,即使进行将针对未发生故障的第一送风机11的速度指令设为控制可能范围中的最大的转速的控制,第一送风机11也只是以比第一送风机11自身能动作的最大转速更受限的转速进行旋转。若只进行这样的控制,则在1个风扇1发生故障的情况下,无法确保风扇1的整体上的充分的风量、静压。例如,在将风扇1用于发热体的冷却用途的情况下,有时不能将冷却对象的发热体充分地冷却。
[0140]
与之相对,在本实施方式中,例如在第二送风机12发生故障时,未发生故障的第一送风机11以能旋转的最大的转矩对第一电机21进行驱动。因此,在第二送风机12发生故障等而产生异常的风扇1被更换成正常的风扇为止的期间,也能够确保尽量多的风量、高的静压。因此,即使在送风机11、12当中的一个处于异常状态的情况下,仅通过送风机11、12当中的另一个,也能够抑制冷却性能的下降。
[0141]
列举一例对其进行说明。假设在以第一动作模式进行动作的正常驱动时,在速度指令信号sc的占空比为100%时,各送风机11、12以如下方式动作的情况。即,在第一送风机11中以第一电机21按照20000rpm进行旋转的方式进行驱动控制。另一方面,在第二送风机12中,以pwm设定指示信号s3的占空比被设定为50%,并且第二电机22按照10000rpm进行旋转的方式进行驱动控制。
[0142]
在该情况下,若第一送风机11因故障而停止,则第二送风机12以第二驱动模式工作。即,第二送风机12以全转矩对第二电机22进行驱动。例如,进行以将pwm设定指示信号s3的占空比设为作为最大值的100%,并且第二电机22按照能旋转的最大的转速即20000rpm进行旋转的方式进行驱动控制。由此,即使第一送风机11发生故障,也能使第二送风机12工作来弥补基于此的功率下降,并能够抑制风扇1的整体上的性能的下降。
[0143]
同样,假设在正常驱动时,当速度指令信号sc的占空比为100%时,在各送风机11、12中,均将pwm设定指示信号s3的占空比设定为50%,并且各电机21、22以5000rpm进行旋转的方式进行驱动控制情况。在该情况下,若第一送风机11因故障而停止,则第二送风机12将pwm设定指示信号s3的占空比设为作为最大值的100%来对第二电机22以全转矩进行驱动。例如,第二电机22以能旋转的最大的转速即10000rpm进行旋转。另外,在第二送风机12因故障而停止的情况下,第一送风机11同样地以全转矩对第一电机21进行驱动。由此,即使第一
送风机11或第二送风机12发生故障,也能够抑制风扇1的整体上的性能的下降。
[0144]
如上所述,根据送风机11、12间的通信结果,在送风机11、12当中的一个发生异常的情况下,对送风机11、12当中的另一个的驱动模式进行切换的。换言之,送风机11、12互相监视动作状态,并在其中一个发生异常时,在另一个中将驱动模式切换为第二驱动模式。如此在送风机11、12之间进行直接通信并切换驱动模式,因此,例如与由控制装置800进行送风机11、12的状态的把握、动作状态的切换的情况相比,能够在送风机11、12当中的一个发生异常后,更迅捷地进行提高送风机11、12当中的另一个的转速的动作。由于能够以风扇1单体进行在送风机11、12当中的一个发生异常时的补偿动作,因此能简化控制装置800的控制内容,并能够简化送风系统801的构成。
[0145]
[其他]
[0146]
构成风扇的送风机、其电机驱动控制装置不限于上述实施方式所示的电路构成。能够应用构成为适合本发明的目的的各种各样的电路构成。还可以将上述实施方式的特征进行部分组合来构成送风机、其电机驱动控制装置。在上述实施方式中,还可以不设置一些组成部分或者将一些组成部分以其他形态构成。
[0147]
控制电路部不限于以针对各驱动模式预先规定动作的形态的方式进行控制。例如,在利用控制电路部进行各种控制的情况下,作为结果,能够评价为该动作的形态成为适合第一动作模式的形态或成为适合第二动作模式的形态即可。即使是这样的构成,也能够将控制电路部的动作形态在适合第一动作模式的形态与适合第二动作模式的形态之间变化的情况称之为控制电路部的动作模式被切换。
[0148]
风扇可以不连接于控制装置。例如,2个电机驱动控制装置可分别在动作模式为第一驱动模式时,以与针对各电机的转速而预先设定的速度指令信息对应的转速,对各电机进行驱动。
[0149]
从第一电机驱动控制装置向第二送风机的询问不限于定期进行,例如也可以不定期地进行。例如,能够以在某时刻隔开第一间隔(例如,100毫秒)来进行下一询问,且进行之后的询问为止的间隔变化为第二间隔(例如,200毫秒)、第三间隔(例如,300毫秒)的方式,改变询问的间隔。如此,在询问的间隔为不定期的情况下,只要在询问的间隔超过比第一间隔、第二间隔、第三间隔更长的规定时间(例如1秒)时,检测为发生异常即可。
[0150]
第一送风机和第二送风机的通信方式、通信协议不限于上述实施方式的内容。第一送风机和第二送风机的任一个可以是通信中的主机。第一送风机与第二送风机能够以相互进行无线通信的方式构成。在此情况下,也可以不设置通信线路。
[0151]
第二驱动模式不限于以全转矩对电机进行驱动。只要是以比通常的转速(在以第一驱动模式进行驱动的情况下的转速)更高的转速进行驱动即可。即,在第二驱动模式下,只要pwm设定指示信号的占空比与以第一驱动模式进行驱动的情况相比更高即可。
[0152]
第二送风机可以配置于入口侧(进气侧),第一送风机可以配置于出口侧(排气侧)。以第一驱动模式进行驱动的情况下的第一电机的转速与第二电机的转速既可以相同,也可以不同。
[0153]
风扇可以具有以旋转轴中心不对齐的方式配置的第一送风机和第二送风机。另外,第一送风机和第二送风机的至少一个可以不是轴流风扇。
[0154]
风扇可以具有3个以上的送风机。即使在该情况下,多个送风机当中的至少任意2
个送风机以如上所述基于进行通信的结果进行动作的方式构成即可。
[0155]
也可以是,仅第一送风机基于与第二送风机之间的通信结果对第一电机的驱动进行控制,第二送风机不考虑与第一送风机之间的通信结果,对第二电机的驱动进行控制。
[0156]
本实施方式的由电机驱动控制装置驱动的电机不限于3相的无刷电机,还可以是其他相数的电机、其他种类的电机。霍尔元件的个数不限于3个。可以使用与霍尔元件不同的检测器来得到电机的位置检测信号。例如,可以使用霍尔ic等。另外,电机能够以通过不使用霍尔元件、霍尔ic等位置检测器的无传感器方式驱动的方式构成。
[0157]
上述流程图等是示出用于说明动作的一例的图,并不限于此。流程图的各图所示的步骤是具体例,本发明并不限于该流程,例如,可以变更各步骤的顺序或在各步骤间插入其他处理,也可以使处理并行。
[0158]
上述实施方式中的处理的一部分或全部既可以通过软件执行,也可以使用硬件电路来执行。例如,控制电路部不限于微机。控制电路部的内部的构成可以是至少一部分通过软件进行处理的构成。
[0159]
应该认为,上述实施方式在全部方面只是例示,并非用于限制。本发明的范围不是由上述说明而是由权利要求书示出,并包括与权利要求书等同的含义以及范围内的全部的变更。
[0160]
标号说明1风扇(送风装置的一例),11第一送风机,12第二送风机,21第一电机,22第二电机,45通信线路,62叶轮,111第一电机驱动控制装置(第一驱动控制单元、第一通信单元、第一异常检测单元的一例),112第二电机驱动控制装置(第二驱动控制单元、第二通信单元、第二异常检测单元的一例),800控制装置(外部装置的一例),sc速度指令信号(速度指令信息的一例)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1