根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法及装置与流程
[0001]
本公开属于电动车防盗技术领域,具体涉及一种根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法及装置。
背景技术:
[0002]
电动车是目前很多人的主要交通工具,但是也是犯罪分子容易盗窃的目标,电动车一旦被盗,很难被找回;由于电动车被盗后存在,无法对电动车做好跟踪,无法确认盗窃人员的面貌特征,无法找到电动车存放的窝点等问题,电动车很难被找回。
技术实现要素:
[0003]
本公开提供了一种根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法及装置,旨在解决现有技术中电动车被盗后难以找回的问题。
[0004]
为了解决上述技术问题,本公开所采用的技术方案为:
[0005]
第一方面,本公开提供了一种根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,包括以下步骤:
[0006]
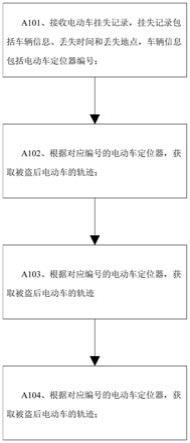
a101、接收电动车挂失记录,挂失记录包括车辆信息、丢失时间和丢失地点,车辆信息包括电动车定位器编号;
[0007]
a102、根据对应编号的电动车定位器,获取被盗后电动车的轨迹;
[0008]
a103、根据被盗后电动车的轨迹获取被盗后电动车的第一停留点;
[0009]
a104、获取被盗后的电动车在第一停留点发生重叠的重叠停留点。
[0010]
在一种可能的设计中,根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,还包括:获取被盗后电动车的第二停留点,获取被盗后电动车的第二停留点重叠的区域。
[0011]
基于上述设计,除了第一停留点可能为电动车被盗后的存放点,第二停留点也可能为电动车被盗后的存放点;此外,第二停留点也可能为电动车被盗后的销售点,有利于警察追踪整个犯罪链。
[0012]
在一种可能的设计中,被盗电动车在被盗后的第一次停靠时间超过设定时间t的位置,为被盗后电动车的第一停留点;被盗电动车在被盗后的第二次停靠时间超过设定时间t的位置,为被盗后电动车的第二停留点。
[0013]
基于上述设计,设置时间t可以排除一些因为临时短暂的停靠,影响对存放点的判断。
[0014]
在一种可能的设计中,获取被盗电动车在第一停留点发生重叠的重叠停留点,包括:对每一个新增的第一停留点进行编号,对n个第一停留点编号为d
n
,
[0015]
当新增的被盗电动车第一停留点确定后,与已经确定的每一个被盗电动车的第一停留点进行距离计算,并获取最小距离s
k
以及与新增的被盗电动车第一停留点距离最小的
第一停留点d
k
;
[0016]
若最小距离s
k
小于或等于设定距离s,则新增的被盗电动车第一停留点与第一停留点d
k
重叠且共用编号d
k
,第一停留点d
k
标记为重叠停留点;
[0017]
若最小距离s
k
大于设定距离s,则新增的被盗电动车第一停留点与已确定被盗的电动车第一停留点d
n
不发生重叠并编号为d
n+1
,第一停留点d
k
标记为重叠停留点;
[0018]
其中,n为正整数,k为1-n之间的正整数。
[0019]
基于上述设计,通过对每个第一停留点进行编号,便于重叠的第一停留点进行合并,对新增的被盗电动车第一停留点与已经确定的每一个被盗电动车的第一停留点进行距离计算,并获取最小距离s
k
,若最小距离s
k
小于或等于设定距离s,则新增的被盗电动车第一停留点与第一停留点d
k
重叠且共用编号d
k
,第一停留点d
k
标记为重叠停留点,通过预先设定好的设定距离s,因电动车存放在一起也有一定的位置差异,此外,定位的精度也会有一定的影响,两个不同电动车的第一停留点停放在一个存放点时,两个第一停留点一般也不会完全重叠,故需要设置一定的容差。
[0020]
在一种可能的设计中,对重叠停留点的重叠次数进行计数,用来统计第一停留点落入重叠停留点的电动车数量,并进行提示。
[0021]
基于上述设计,若重叠的次数越多,表明被盗电动车在该重叠停留点的嫌疑越大,需要引起警察的注意,并可以进行提示。
[0022]
在一种可能的设计中,根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,还包括:调取与被盗电动车的轨迹上的监控摄像头,获取被盗电动车的监控录像,截取盗窃人员的人脸图像并上传至服务器;
[0023]
采用人脸识别算法将盗窃人员的人脸图像与已经存储的每张人脸图像进行匹配;若匹配失败,将盗窃人员的人脸图像添加为新的人脸图像并存储;若匹配成功,则找出匹配成功的人脸图像。
[0024]
基于上述设计,通过被盗电动车的轨迹上的监控摄像头可以获取被盗人员的面部信息,便于警察抓捕,且可以对电动车的走向进行跟踪追回;此外,对新捕获的人脸图像与已经存储的进行对比,可以判断出同一个人是否盗窃多次,便于警察的重点抓捕,也可以利用多次的盗窃信息和第一停留点,便于推断出被盗电动车的库存点,追回更多的电动车。
[0025]
在一种可能的设计中,根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,还包括:采用人脸识别算法将盗窃人员的人脸图像与已经存储的每张人脸图像进行匹配时,具体为:
[0026]
识别盗窃人员的人脸图像的特征,计算盗窃人员的人脸图像的特征与已经存储的每张人脸图像的特征之间的欧式距离;若欧式距离小于或等于阈值,则匹配成功,则找出匹配成功的人脸图像;若欧式距离大于阈值,则匹配失败,将盗窃人员的人脸图像的特征形成新的模板并存储。
[0027]
基于上述设计,通过欧式距离的计算人脸图像的特征可以判断出两个人脸图像是否为同一个人。
[0028]
第二方面,本公开提供了一种根据配置有定位器的电动车挂失记录识别盗窃区域的装置,包括:
[0029]
接收单元,用于接收电动车挂失记录,挂失记录包括车辆信息、丢失时间和丢失地
点,车辆信息包括电动车定位器编号;
[0030]
轨迹获取单元,根据对应编号的电动车定位器,获取被盗后电动车的轨迹;
[0031]
第一停留点获取单元,根据被盗后电动车的轨迹获取被盗后电动车的第一停留点;
[0032]
重叠留点获取单元获取被盗后的电动车在第一停留点发生重叠的重叠停留点。
[0033]
第三方面,本公开提供了一种计算机设备,包括通信相连的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如上所述根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法。
[0034]
第四方面,本公开提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如上所述根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法。
[0035]
本公开的有益效果为:
[0036]
电动车被盗后,接收到车主的挂失记录后,确定电动车的电动车定位器,根据电动车定位器,可以获取被盗后电动车的轨迹,根据被盗后电动车的轨迹获取被盗后电动车的第一停留点,第一停留点基本上是电动车被盗后的存放点,便于车主或警察追踪电动车的位置和被盗窃的电动车的存放窝点,也利于确定盗窃人员的活动区域,便于找回电动车并抓捕盗窃人员;获取被盗后的电动车在第一停留点发生重叠的重叠停留点,说明至少两辆以上被盗的电动车被存放在该处,则说明重叠停留点为嫌疑较大的被盗电动车存放点,此外,重叠停留点有定位器的被盗电动车有至少两辆,则说明大概率还存放有一些没有定位器的被盗电动车,有利于警察找回被盗电动车。
附图说明
[0037]
为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简要介绍,应当理解,以下附图仅示出了本公开的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关附图。
[0038]
图1是本公开中的流程示意图。
[0039]
图2是本公开中计算机设备的结构示意图。
具体实施方式
[0040]
下面将结合本公开实施例中附图,对本公开实施例中的技术方案进行清楚完整的描述。应当理解,此处所描述的具体实施例仅仅用于解释本公开,并不用于限定本公开。基于本公开的实施例,本领域技术人员在没有创造性劳动的前提下所获得的所有其他实施例,都属于本公开的保护范围。
[0041]
第一方面,本公开提供了一种根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,包括以下步骤:
[0042]
a101、接收电动车挂失记录,挂失记录包括车辆信息、丢失时间和丢失地点,车辆信息包括电动车定位器编号;
[0043]
其中,挂失记录,由车主通过客户端录入,客户端适用于在丢失之间已经在客户端做过电动车登记备案且电动车内配置有定位器的用户;
[0044]
其中,车辆信息包括但不限于已经备案的车牌号、车主身份信息和电动车定位器编号;
[0045]
其中,定位器可以采用北斗定位器或gps定位器等。
[0046]
a102、根据对应编号的电动车定位器,获取被盗后电动车的轨迹;
[0047]
其中,被盗后电动车的轨迹,为在丢失时间以后的轨迹,并通过电动车定位器获取该轨迹。
[0048]
a103、根据被盗后电动车的轨迹获取被盗后电动车的第一停留点;
[0049]
其中,根据轨迹具体如何获取停留点的方法属于现有技术,这里不再赘述,可以采用如专利号为2017107906468所述的一种北斗gps轨迹停留分析方法等,获得定位对象停留的位置以及在该位置停留的时长。
[0050]
其中,第一停留点为电动车被盗后,第一次发生停留的位置。
[0051]
a104、获取被盗后的电动车在第一停留点发生重叠的重叠停留点;
[0052]
其中,重叠停留点为不同被盗的电动车在第一次停靠时,至少两个在同一地点停留的位置为重叠停留点;若有两辆以上被盗电动车第一停靠点均停留在同一个地方,则大概率说明,重叠停留点属于犯罪的窝点。
[0053]
在上述方案的基础上,根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,还包括:获取被盗后电动车的第二停留点,获取被盗后电动车的第二停留点重叠的区域。
[0054]
由于电动车被盗后,电动车基本不会在第一时间卖出去,一般会停放在盗窃人员的仓库,或直接转移到销售点,这时盗窃人员的仓库或销售点属于第一停留点;也有些情况是,先存放在盗窃人员的仓库,再专卖到销售点,这时第一停留点是盗窃人员的仓库,第二停留点是销售点;这样可以找到参与犯罪的销售点。
[0055]
在上述方案的基础上,被盗电动车在被盗后的第一次停靠时间超过设定时间t的位置,为被盗后电动车的第一停留点;被盗电动车在被盗后的第二次停靠时间超过设定时间t的位置,为被盗后电动车的第二停留点;
[0056]
电动车停留的时间如果太短,可能是因为盗窃人员临时停靠,故需要设置一个时间t,时间t的选择可以选择0.5天、1天或2天等,根据不同地区盗窃人员的销赃方式和习惯进行相应的调整。
[0057]
在上述任一方案的基础上,获取被盗电动车在第一停留点发生重叠的重叠停留点,包括:
[0058]
对每一个新增的第一停留点进行编号,对n个第一停留点编号为d
n
,
[0059]
当新增的被盗电动车第一停留点确定后,与已经确定的每一个被盗电动车的第一停留点进行距离计算,并获取最小距离s
k
以及与新增的被盗电动车第一停留点距离最小的第一停留点d
k
;
[0060]
若最小距离s
k
小于或等于设定距离s,则新增的被盗电动车第一停留点与第一停留点d
k
重叠且共用编号d
k
,第一停留点dk标记为重叠停留点;
[0061]
若最小距离s
k
大于设定距离s,则新增的被盗电动车第一停留点与已确定被盗的
电动车第一停留点d
n
不发生重叠并编号为d
n+1
,第一停留点d
k
标记为重叠停留点;
[0062]
其中,n为正整数,k为1-n之间的正整数。
[0063]
其中,设定距离s可以为10m、12m、15m等,一般范围不超过一个小型仓库的大小。
[0064]
在上述任一方案的基础上,对重叠停留点的重叠次数进行计数,用来统计第一停留点落入重叠停留点的电动车数量,并进行提示。
[0065]
重叠1次,第一停留点落入重叠停留点的电动车数量为2个,重叠2次,第一停留点落入重叠停留点的电动车数量为3个,依次类推。重叠次数越多,说明停靠在该重叠停留点的被盗电动车数量越多。可以通过颜色、数字等进行提示。
[0066]
在上述任一方案的基础上,根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,还包括:调取与被盗电动车的轨迹上的监控摄像头,获取被盗电动车的监控录像,截取盗窃人员的人脸图像并上传至服务器;
[0067]
采用人脸识别算法将盗窃人员的人脸图像与已经存储的每张人脸图像进行匹配;若匹配失败,将盗窃人员的人脸图像添加为新的人脸图像并存储;若匹配成功,则找出匹配成功的人脸图像。
[0068]
其中,调取与被盗电动车的轨迹上的监控摄像头,获取被盗电动车的监控录像,截取盗窃人员的人脸图像并上传至服务器;这里由具备权限的相关工作人员进行调取,根据被盗电动车的轨迹,通过摄像头可以顺利获取被盗电动车经过时间段的被盗电动车录像,人工截取盗窃人员面部较为清晰的人脸图像。
[0069]
其中,人脸识别算法可以采用现有的人脸识别算法,例如:基于人脸特征点的识别算法、基于模板的识别算法、基于整幅人脸图像的识别算法等;具体如专利号为2013107530803中的人脸识别方法;本公开中人脸识别采用现有技术,本身未做改进,这里不再赘述。
[0070]
在上述方案的基础上,采用人脸识别算法将盗窃人员的人脸图像与已经存储的每张人脸图像进行匹配时,具体为:识别盗窃人员的人脸图像的特征,计算盗窃人员的人脸图像的特征与已经存储的每张人脸图像的特征之间的欧式距离;若欧式距离小于或等于阈值,则匹配成功,则找出匹配成功的人脸图像;若欧式距离大于阈值,则匹配失败,将盗窃人员的人脸图像的特征形成新的人脸图像特征并存储。
[0071]
其中,人脸图像的特征是指人的脸部信息特征,包括几何特征和/或表征特征;几何特征包括但不限于眼睛、鼻子和嘴等面部特征之间的距离、面积和角度等几何关系;表征特征为利用人脸图像的灰度信息,通过lbp算法等算法提取全局或局部特征。
[0072]
其中,欧式距离的算法为:设图像矩阵有n个元素(n个像素点),用n个元素值(x1,x2,...,xn)组成该图像的特征组(像素点矩阵中所有的像素点),特征组形成了n维空间,特征组中的特征码(每一个像素点)构成了每一维的数值,就是x1(第一个像素点)对应一维,x2(第二个像素点)对应二维,...,xn(第n个像素点)对应n维。在n维空间下,两个图像矩阵各形成了一个点,然后利用数学上的欧式距离公式计算这两个点之间的距离,距离最小者就是最匹配的图像。
[0073]
欧式距离公式:
[0074]
点a=(x1,x2,...,xn)
[0075]
点b=(y1,y2,...,yn)
[0076]
ab^2=(x1-y1)^2+(x2-y2)^2+...+(xn-yn)^2
[0077]
ab就是所求的a,b两个多维空间中的点之间的距离。
[0078]
第二方面,本公开提供了一种根据配置有定位器的电动车挂失记录识别盗窃区域的装置,包括:
[0079]
接收单元,用于接收电动车挂失记录,挂失记录包括车辆信息、丢失时间和丢失地点,车辆信息包括电动车定位器编号;
[0080]
轨迹获取单元,根据对应编号的电动车定位器,获取被盗后电动车的轨迹;
[0081]
第一停留点获取单元,根据被盗后电动车的轨迹获取被盗后电动车的第一停留点;
[0082]
重叠留点获取单元获取被盗后的电动车在第一停留点发生重叠的重叠停留点。
[0083]
第三方面,参阅图2,本公开提供了一种执行第一方面中任一设计所述根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法的计算机设备,包括依次通信相连的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如在第一方面中任意一种可能设计中所述的根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法。具体举例的,所述存储器可以但不限于包括随机存取存储器(random-access memory,ram)、只读存储器(read-only memory,rom)、闪存(flash memory)、先进先出存储器(first input first output,fifo)和/或先进后出存储器(first input last output,filo)等等;所述处理器可以不限于采用型号为stm32f105系列的微处理器;所述收发器可以但不限于为无线保真(wireless fidelity,wifi)、无线收发器、蓝牙无线收发器、通用分组无线服务技术(general packet radio service,gprs)无线收发器和/或紫蜂协议(zigbee)无线收发器等。此外,所述计算机设备还可以但不限于包括有电源模块、显示屏和其它必要的部件。
[0084]
本公开提供的前述计算机设备的工作过程、工作细节和技术效果,可以参见如上第一方面中的任意一种设计所述的根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,于此不再赘述。
[0085]
第四方面,本公开提供了一种存储包含在第一方面中任意一种设计中的所述防止多人写入导致数据被覆盖的方法的计算机可读存储介质,即所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如在第一方面中任意一种可能设计中的所述根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法。其中,所述计算机可读存储介质是指存储数据的载体,可以但不限于包括软盘、光盘、硬盘、闪存、优盘和/或记忆棒(memory stick)等,所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。
[0086]
本公开提供的前述计算机可读存储介质的工作过程、工作细节和技术效果,可以参见如上第一方面中任意一种可能设计所述的根据配置有定位器的电动车挂失记录识别被盗电动车存放点的方法,于此不再赘述。
[0087]
以上所描述的实施例仅仅是示意性的,若涉及到作为分离部件说明的单元,其可以是或者也可以不是物理上分开的;若涉及到作为单元显示的部件,其可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本公开方案的目的。本领域普通技术人员在不付
出创造性的劳动的情况下,即可以理解并实施。
[0088]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
[0089]
最后应说明的是,本发明不局限于上述可选的实施方式,任何人在本发明的启示下都可得出其他各种形式的产品。上述具体实施方式不应理解成对本发明的保护范围的限制,本发明的保护范围应当以权利要求书中界定的为准,并且说明书可以用于解释权利要求书。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1